 ⽆刷⽆感直流电机驱动硬件的分析
⽆刷⽆感直流电机驱动硬件的分析
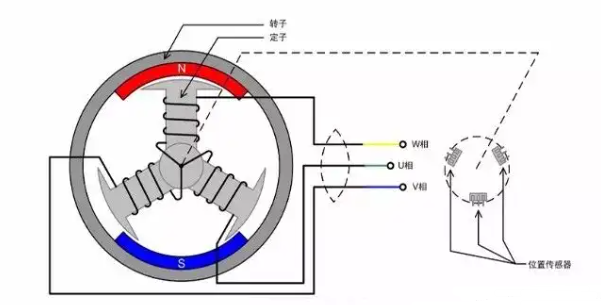
无刷电机驱动的关键是准确知道转⼦的位置,有感电机通过传感器获取转⼦位置,⽆感电机只能通过间接⽅式获取电机转⼦位置,常见的⽅法有反电动势法、电感法、磁链法、⾼频脉冲法及其它智能⽅法,
应⽤最多的是反电动势法,反电动势法⽆刷⽆感电机驱动电路可主要分为三部分:功率驱动部分,控制部分,转⼦位置检测部分,这次主要来分析下功率驱动部分。
功率驱动部分有⼆种实现⽅式,⼀是使⽤集成电机驱动IC,⼆是使⽤分⽴元件搭建。使⽤集成IC更加简单,⽽且⼤多驱动IC都集成了多种保护功能,更加可靠,但成本较⾼。
使⽤分⽴元件搭建有⼆种:
① 使⽤N + P管,这种⽅式实现简单,⽽且PWM控制信号占空⽐能达到100%,但P管价格相对较⾼,⼀般电流在100A,耐压在100V内,多应⽤于低压⼩功率应⽤R1,R4⼀般在100Ω以内,但也不能太⼩,⼀般为⼏⼗Ω,R2,R3,R5⼀般为⼏K到⼏⼗K
②使⽤全N管,如下图,N管耐压及功率可选范围很宽,所以适⽤于各种应⽤电路,但上臂桥驱动较复杂,如果采⽤⾃举升压电路,PWM占空⽐不能达到100%。
电机的驱动有很多种方案,就像现在的其利天下采用的自己封装的KYLIN32系列,在方波无刷驱动中占有较大的性价比,并且公司有成熟的开发团队,独立的电机核心算法,保证方案的可实施性更强。尤其在筋膜枪和吹尘器方面的方案占有特高的性价比。为客户在残酷的市场竞争中立于不败之地奠定了坚实的基础。
审核编辑:符乾江
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
电机
+关注
关注
142文章
9014浏览量
145438 -
驱动IC
+关注
关注
9文章
303浏览量
33815
发布评论请先 登录
相关推荐
无刷直流电机是什么?它有什么特点?
无刷直流电机(Brushless DC Motor,简称BLDC)是一种没有电刷和换向器的电机,它通过电子方式实现换向。这种电机在许多应用中非常受欢迎,因为它具有高效率、高可靠性、低维
浅谈有刷直流电机可以分为哪几种类型?
有刷直流电机(Brushed DC Motor)是一种常见的直流电机,它通过电刷和换向器来实现电流方向的交替变化,从而产生旋转力矩。有刷直流电机
有刷直流电机的原理是什么?它的特点是什么?
有刷直流电机是一种常见的直流电机,其工作原理和特点如下: 工作原理: 有刷直流电机主要由定子和转子两部分组成。定子是
探索无刷直流电机驱动方案的技术应用
在当今科技飞速发展的时代,无刷直流电机以其高效、可靠、低噪音等诸多优点,在众多领域得到了广泛的应用。而无刷直流电机驱动方案则是实现其优异性能

BLDC电机与有刷直流电机的区别
电机作为现代工业自动化的关键组成部分,广泛应用于各种设备和系统中。其中,无刷直流电机(Brushless Direct Current Motor,简称BLDC电机)和有
永磁无刷直流电机的控制方法
永磁无刷直流电机(BLDCM)因其高效率、高功率密度、低维护成本等优点,在电动汽车、航空航天、工业自动化等领域得到了广泛应用。为了充分发挥永磁无刷直流电机的性能,采用合适的控制方法至关
无刷直流电机驱动单元
NEWUnitBLDCDriverUnitBLDCDriver是一款专为无刷直流电机(BLDC)设计的驱动单元,采用I2C通信接口,可同时挂载多路电机进行控制。适用于风扇、小型泵等小型

无刷直流电机(BLDC)运转工作原理图
无刷直流电机(BLDC)以电子换向器取代了机械换向器,所以无刷直流电机既具有直流电机良好的调速性能等特点,又具有交





 工商网监
工商网监
评论