 KUKA编程:命令通道$FCT_CALL的功能
KUKA编程:命令通道$FCT_CALL的功能
命令通道 $FCT_CALL 的功能
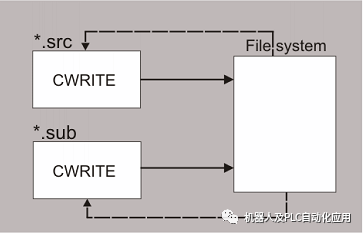
使用 CWRITE 调用命令通道 $FCT_CALL 的文件系统函数。调用时,函数参数必须作为 Var1 … Var10 传送到 CWRITE。此外,CWRITE 传输的写入模式必须是#SYNC。
默认情况下,函数访问的文件存储在本地目录C:KRCROBOTERUserFiles。存储在那里的文件的最大总大小限制为 10 MB,即存储在那里的所有文件的总大小不得超过此限制。也可以通过函数 krl_mount() 使用启用的网络驱动器。
可以从机器人解释程序或提交解释程序调用文件系统函数。不允许从一个解释器打开文件,然后从另一个解释器访问它,例如 写入或再次关闭文件。
错误处理
每个文件系统函数通过 CWRITE 提供一个返回值,可以在 KRL 程序中查询和评估。返回值指示函数是成功执行还是因错误而中止。
调用 CWRITE 时传递的变量 State.RET1 用于监控是否发生错误:
State.RET1= #DATA_OK:函数执行成功
State.RET1= #CMD_ABORT: 函数因错误而取消
在发生错误的情况下,返回的错误号可用于定位原因。使用变量 State.MSG_NO 轮询错误号。描述了每个功能的可能错误编号。
$FCT_CALL: 将字符写入文件
命令通道 $FCT_CALL 的管理号(句柄)
CWRITE() 函数可用于通过 $FCT_CALL 命令通道调用函数。变量本身是写保护的。
$FCT_CALL=Number
字符“a”将通过命令通道 $FCT_CALL 写入文件MyTest.TXT。如果文件已经存在,则在打开文件时删除文件的内容。 对于使用 CWRITE 的每个函数调用,都要进行检查以查看函数是成功执行还是因错误而中止。如果发生错误,可以根据错误原因编程相应的错误处理。如果没有发生错误,将写入字符并再次关闭文件. krl_mount()创建和连接挂载点
为了从 KRL 连接到启用的网络驱动器,必须为挂载点分配一个名称,并且必须知道启用目录的完整路径。连接网络驱动器也需要用户的用户名和加密密码。
机器人控制器 C:KRCUTILHash 目录下的程序 khash.exe 可用于加密密码。程序 khash.exe 必须在 Windows shell cmdk.exe 上执行,并且需要输入密码。
例如,如果用户的密码是“kuka”,则 Windows shell 上的加密程序调用如下:khash.exe kuka
在 KRL 程序中调用 krl_mount() 时必须使用的加密密码随后会显示在 Windows shell 上。
krl_mount(CHAR[] Name, CHAR[] Path, CHAR[] User, CHAR[] Password)
例:
使用名称 TransferNet 建立到网络驱动器 \160.160.113.23 ransfer 的挂载点。使用加密密码为用户“Administrator”建立连接:
CWRITE($FCT_CALL, State, Mode, "krl_mount", "/TransferNet","//160.160.113.23/transfer","Administrator","04FF94D4B99A1153C8CF3D479089A77AFE")
krl_unmount()
删除挂载点
此函数可用于终止与使用 krl_mount() 建立的网络驱动器的连接。
krl_unmount(CHAR[] Name)
Name创建的挂载点名称
名称必须以字符“/”开头,并且不得包含另一个“/”字符。
与挂载点 TransferNet 的连接被终止:
CWRITE($FCT_CALL, State, Mode, "krl_unmount", "/TransferNet")
krl_fopen()
打开一个文件
根据选择的模式,文件以文本文件或二进制文件的形式打开以进行读访问和/或写访问。可用模式对应于头文件 stdio.h 的 fopen() 函数。
在 KRL 程序中使用此功能最多可以同时打开 11 个文件。
krl_fopen(CHAR[] Name, CHAR[] Mode, INT Handle <, BUFF_MODE_T Buffering> )
Mode
“r”
作为文本文件打开以进行读取访问
在这种模式下,一个文件可以连续打开多次(包括由机器人和提交解释器同时打开)而无需先关闭。在每种情况下都会返回一个不同的句柄。这些句柄中的每一个都必须在某个时候关闭,因为否则无法以不同的模式打开文件。
“w”
作为文本文件打开以进行写访问
在这种模式下,文件的内容在打开时被删除。如果他的文件不存在,则创建它。
“a”
作为文本文件打开以进行写访问
在这种模式下,文件的内容在打开时不会被删除;相反,写入的值被添加到文件的末尾。如果文件不存在,则创建它。
“rb”
作为二进制文件打开以进行读取访问
“wb”
作为二进制文件打开以进行写访问
“r+”
作为文本文件打开以进行读写访问
注意:打开文件后,文件指针指向文件的开头。为确保在将数据写入文件时不会覆盖任何内容,必须通过函数 krl_fseek() 将文件指针放在文件末尾。
例:
文件 ROBOTERUserFilesMyFile.txt 作为文本文件打开以进行读取访问:
CWRITE($FCT_CALL, State, Mode, "krl_fopen", "MyFile.txt", "r", FileHandle)
文件 ROBOTERUserFiles estMyFile.txt 作为二进制文件打开,用于读写访问。如果该文件已存在,则删除该文件的内容。
如果文件不存在,则创建它:
CWRITE($FCT_CALL, State, Mode, "krl_fopen", "Test/MyFile.txt", "wb+", FileHandle)
MyFile.txt 文件作为文本文件打开,用于读取访问,无需在启用的网络驱动器上进行缓冲。名称为 Net1 的网络驱动器的挂载点必须首先通过 krl_mount() 创建:
CWRITE($FCT_CALL, State, Mode, "krl_fopen", "/Net1/MyFile.txt", "r",
FileHandle, #NO_BUFF)
krl_fclose()
关闭文件
该文件由传输的句柄明确确定。一旦文件被关闭,句柄就无效并且不能用于进一步的文件系统操作。
当文件关闭时,写入缓冲区的内容将写入文件。
krl_fclose(INT Handle)
文件通过文件句柄关闭:CWRITE($FCT_CALL, State, Mode, "krl_fclose", FileHandle)
krl_fputc()
将字符写入文件
文件中写入字符的点取决于打开文件的模式和文件指针的位置。
krl_fputc(INT Handle, CHAR Character)
字符“x”被写入句柄传输的文件中:CWRITE($FCT_CALL, State, Mode, "krl_fputc", FileHandle, "x")
krl_fputs()
将字符串写入文件
该函数可用于将常量字符串或可变字符串写入文件。如果使用变量,则 CHAR 数组的每个元素都必须初始化并包含一个有效值。
文件中写入字符串的点取决于打开文件的模式和文件指针的位置。
krl_fputs(INT Handle, CHAR[] String)
例:
一个常量字符串被写入到句柄传送的文件中:
CWRITE($FCT_CALL, State, Mode, "krl_fputs", FileHandle, "write this!")
将变量“StringVar[]”中包含的字符串写入句柄传送的文件中:
CWRITE($FCT_CALL, State, Mode, "krl_fputs", FileHandle, StringVar[])
krl_fwriteln()
将字符串逐行写入文件
该函数可用于将常量字符串或可变字符串写入文件。将行尾字符附加到要写入的字符串。如果使用变量,则 CHAR 数组的每个元素都必须初始化并包含一个有效值。
文件中写入字符串的行取决于打开文件的模式和文件指针的位置。
krl_fwriteln(INT Handle, CHAR[] String)
将一个空行写入句柄传输的文件中:
CWRITE($FCT_CALL, State, Mode, "krl_fwriteln", FileHandle, " ")
krl_fprintf()
将字符串格式化写入文件
要写入的格式作为字符串传送给函数。要写入的值也会被传送。
可用格式在头文件 stdio.h 的 fprintf() 函数的文档中列出。除了“%o”、“%p”、“%n”和列表“[List]”之外,所有格式都是允许的。
krl_fprintf(INT Handle, CHAR[] Format, Par1, … , Par8)
由字符“;”分隔的 3 个值 被写入由句柄传输的文件并格式化:
CWRITE($FCT_CALL, State, Mode, "krl_fprintf", FileHandle, "%s;%x;%c", "Item1", 'HA0', CharVar)
例:
DECL INTHANDLE DECL STATE_T STAT DECL MODUS_T MODE
...
CHAR MYCHAR
...
MODE =#SYNC HANDLE = 0 MYCHAR = "a"
...
; 在 C:KRCROBOTERUserFiles 下创建一个文件
CWRITE($FCT_CALL, STAT, MODE,"krl_fopen", "MyTest.TXT", "w", HANDLE)
; 检查是否发生错误
IF (STAT.RET1 == #CMD_ABORT)THEN
IF (STAT.MSG_NO == -5) THEN
; 如果有很多文件已经打开,则错误处理...
ELSE
; 如果需要,检查其他错误代码
... ENDIF
ELSE
; 没有发生错误
; 将字符写入文件
CWrite($FCT_CALL, STAT, MODE, "krl_fputc",HANDLE, MYCHAR) IF (STAT.RET1 == #CMD_ABORT) THEN
; 错误处理
... ENDIF
; 关闭文件
CWRITE($FCT_CALL, STAT, MODE,"krl_fclose", HANDLE) IF (STAT.RET1 == #CMD_ABORT) THEN
错误处理
... ENDIF
ENDIF
大家有空可以试试吧!
审核编辑 :李倩
-
函数
+关注
关注
3文章
4333浏览量
62692 -
KUKA
+关注
关注
3文章
217浏览量
16547 -
解释器
+关注
关注
0文章
103浏览量
6532
原文标题:也许使用它会对KUKA编程有一个突破性的认识---$FCT_CALL。
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
瀚海微SD NAND存储功能描述(14)命令类a
通过串行和AT命令使用wps8266,是否可以使用WPS PBC功能和AT命令?
abb机器人编程指令详解中的call什么意思
鸿蒙开发电话服务:【@ohos.telephony.call (拨打电话)】


请问CY8CKIT-005-A是否支持命令行编程?
LOTO示波器动作编程功能(命令批处理)
LOTO示波器动作编程功能(命令批处理)
具有可编程检测和复位功能的宽VIN 65V双通道过压或欠压检测器TPS38数据表

具有可编程检测和复位延迟功能的宽VIN 65V 双通道过压和欠压(OV 和 UV)检测器TPS37数据表
具有过流保护功能的 TPS65680 18 通道图形可编程电平位移器数据表





 工商网监
工商网监
评论