 无人机遥感数据的处理与滑坡信息提取
无人机遥感数据的处理与滑坡信息提取

近些年无人机遥感技术发展迅速,已经成为传统航空摄影测量的有利补充,它具有拍摄角度灵活,起降不受地形地势影响,悬停时间长,分辨率高等优势,已被广泛应用在地质环境与灾害调查、国土资源管理、基础地理信息更新等领域。虽然无人机获取的影像分辨率较高,但由于无人机所携带的相机一般为普通的数码相机,这种相机的像幅较小,使得获取的影像数量较多,影像畸变较大;由于拍摄时倾角过大以及倾斜方向不规律的原因,使得相邻影像同名点之间存在尺度与旋转的差异;另外无人机上搭载的GPS精度较低,利用POS数据进行绝对定向时误差较大,因此只依赖于传统的摄影测量方法不适合处理无人机影像。郭复胜等成功地将三维重建技术应用到无人机图像处理领域,实现了对全自动的大场景三维重建,从而实现了利用无人机影像获取高分辨率的DOM,但未获取地面控制点,因此无法进行绝对定向,限制了成果的进一步利用。虽然近些年无人机遥感得到了广泛的应用,但是在滑坡信息提取方面的研究较少,特别是运用高精度的DEM与DOM对滑坡区域进行定量的提取与分析方面。
因此,本文采用多旋翼无人机搭载高光谱成像相机的影像获取平台,采取倾斜拍摄与垂直拍摄相结合的拍摄方式,获取了滑坡表面丰富的光谱与纹理信息;在绝对定向方面,采用RTK野外测量控制点的方式,克服了POS信息精度低的问题;在影像处理方面,将计算机视觉算法与摄影测量原理相结合,实现了DEM与DOM的数据生产;在滑坡信息提取方面,采用多尺度分割与面向对象分类方法,并引入了坡度信息、可见光波段差异植被指数、灰度共生矩阵作为分类参数,运用基于阈值的模糊分类与SVM监督分类方法实现了滑坡信息的提取,使得无人机遥感在滑坡信息提取领域有了更深一步的应用。
1 研究区概况和数据获取
1.1研究区概况
本文的研究区位于北京市西南部的霞云岭乡附近,经度范围115°36′20″~115°37′25″E,纬度范围39°42′35″~39°43′25″N。研究区纵向长为850m,横宽约900m,海拔范围378~850m,研究区概况如图1所示。研究区主要为山区,地形起伏较大,平均坡度为30°,其中疑似滑坡区域的最大坡度为55°。该区域主要为公路施工残渣的堆渣场,表现出潜在的变形复活迹象,伴随着复杂的地形条件和人为因素,一旦发生滑坡将会造成巨大的人员和财产损失。
1.2控制点的量测
本文选择55个均匀分布在研究区内的控制点进行三维坐标的量测,为了获得高精度的控制点,选取地势较高,视野开阔的区域架设基站点,并在每个测量点上涂抹油漆,便于后期对无人机影像进行绝对定向。控制点的量测有两个目的:①可以用来对无人机影像进行绝对定向;②可以对获取的DEM和DOM影像进行精度验证。本实验空间参考选择WGS_1984_UTM投影坐标系,其中5个控制点用于绝对定向,公路区域内20个点和滑坡区域内30个点作为检查点,用于精度验证,其中测量点的空间位置与标记以及基站的位置如图1所示。
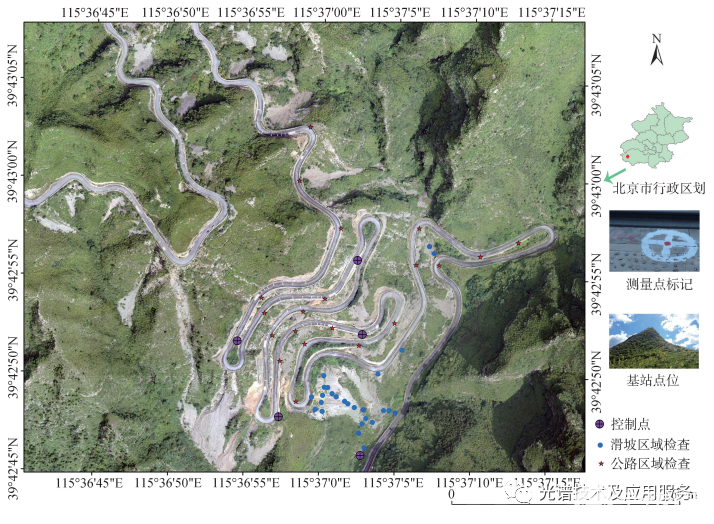
图1研究区概况及控制点和检查点的分布
1.3无人机影像的获取
本文研究区为山区,地势起伏大,高程变化显著,因而会增加影像的畸变,并且传统的垂直拍摄的方式可能会损失部分纹理信息,因此本文对重点研究区域采取倾斜拍摄与垂直拍摄相结合的影像获取方式,充分利用侧视影像来获取地物的侧面纹理信息,更有利于提取滑坡特征。研究区内大部分为山区的公路和低矮植被,地物种类少,具有显著特征的地物较少,为了保证影像匹配以及后期成果的精度,在航线规划过程中尽量增加重叠度,本次飞行过程中航向重叠不低于75%,旁向重叠不低于60%。因此,在飞行航线的设计过程中,需要根据航向重叠、旁向重叠、地面分辨率的要求来设定飞行航高以及拍摄位置,并结合航高与相机参数来计算航线的最低点的分辨率,具体计算公式如下:
通过上述计算确定本次实验分为2次飞行:第1次飞行对整个研究区进行垂直拍摄,飞行航高为950m;第2次飞行对重点滑坡区域进行垂直拍摄加倾斜拍摄,其中垂直拍摄的飞行航高为720m,倾斜拍摄航高为700m。
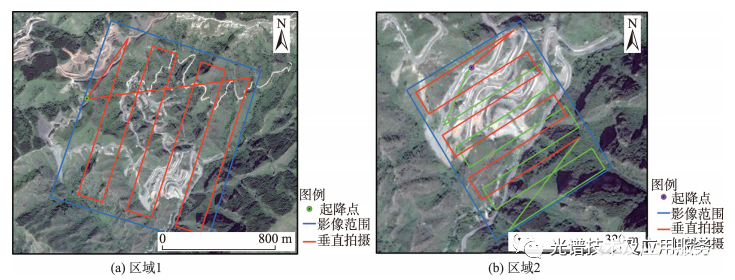
图2飞行航线和影响范围
2 数据处理和精度验证
2.1无人机影像的预处理
由于无人机的飞行姿态较不稳定,加上北京的空气常伴有雾霾,因此导致获取的无人机影像曝光不均匀,相片偏白,本文采用多尺度Retinex算法对图像进行增强处理,该算法是一种基于光照补偿的影像增强算法,经过处理后每张照片图像清晰,色调均匀。为了保证后期产品的精度,在人工选取控制点进行绝对定向时,选择了标志点清晰、重叠率高、均匀分布于重点研究区域的5个点作为控制点,并将每个控制点转刺到5到8张相片上,其中控制点的分布如图1所示。
2.2自动空中三角测量
空中三角测量是无人机影像处理的核心内容,其结果的质量直接影响后期DEM和DOM的精度,主要包括以下3个方面:
(1)特征点的提取与匹配:通过SURF算法提取每张照片的特征点进行匹配,并通过RANSAC算法对匹配的结果进行优化,以提高匹配精度。
(2)相对定向与绝对定向:通过相片的焦距信息以及匹配的特征点进行相对定向,从而恢复每张照片拍摄时的空间姿态,其空间位置如图3所示。接着通过野外测量的控制点进行绝对定向,从而使每张照片具有绝对的空间坐标。
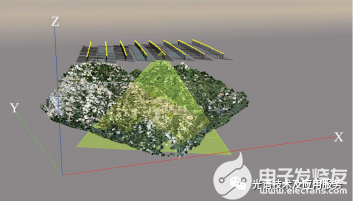
图3相片的空间位置与覆盖范围
(3)光束法平差:根据提取的特征点以及匹配点来恢复投影光束,并按照光束法平差模型对研究区进行整体解算,求取像点坐标与相片的内外方位元素。区域1中选取的5个控制点中误差为0.103m,区域2中5个控制点中误差为0.079m
2.3DEM和DOM的生产
DEM和DOM是后期信息提取的核心数据,通过该数据可以获取滑坡的空间形态与表面纹理信息。利用空中三角测量加密后的结果进行密集匹配,生成高精度的三维点云数据,依据点云数据生成DEM影像。根据高精度的DEM影像依次对每张相片进行数字微分纠正,并进行拼接与镶嵌处理,从而获得整个研究区的DOM影像。通过上述方法,获得整个研究区(图2(a))的DOM和DEM数据,其空间分辨率为8.6cm,重点区域(图2(b))的分辨率为5.4cm,数据成果如图4所示。
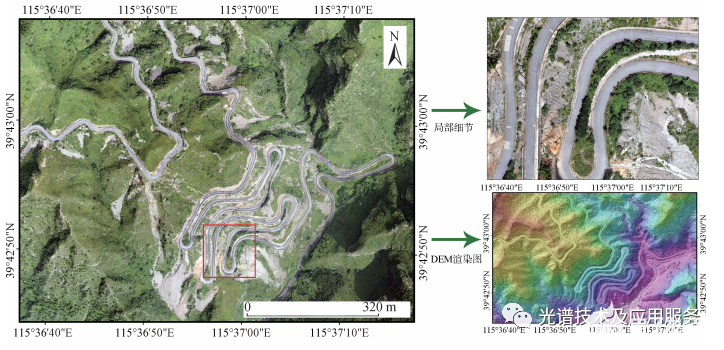
图4研究区DOM与DEM影像
2.4DEM和DOM的精度评价
高精度的DEM和DOM数据对地形地势分析和滑坡信息提取具有十分重要的意义,因此需要选择合适的方法来对DEM和DOM进行精度验证。本文通过野外测量的检查点坐标与获取的DEM与DOM数据进行运算来完成精度验证。选取50个均匀分布在研究区内的点作为检查点,其中30个点分布在滑坡区域,20个点分布在公路区域,分布情况如图1所示。对于DEM的验证,通过将野外GPSRTK测量的检查点高程值与相应点的DEM影像值进行运算得到误差。
DOM的精度评价方法与上述方法类似,通过野外GPSRTK测量的检查点平面坐标与DOM上相应点坐标进行运算得到误差。根据上述方法,计算得到DEM与DOM影像中检查点中误差,其中DEM影像的高程中误差为0.253m,DOM的水平位移中误差为0.104m。根据《数字航空摄影测量空中三角测量规范》(GB/T23236-2009)的要求,符合1:500的DEM与DOM的制作要求,因此,本文的实验成果具有较高的精度。本文获取的DOM影像分辨率较高,较好地保留了局部的纹理信息,其中植被、裸露岩石、堆积碎石清晰可见,弥补了卫星影像分辨率不足的劣势。参照验证结果,DEM数据具有较高的分辨率与位置精度,相较于地面测量获取DEM的方式,本文的方法生产效率高,并且有精度保证;相较于运用遥感影像建立的立体像对获取DEM方法,本文的研究方法在精度上有了大幅度的提升。
莱森光学(深圳)有限公司是一家提供光机电一体化集成解决方案的高科技公司,我们专注于光谱传感和光电应用系统的研发、生产和销售。
审核编辑 黄昊宇
-
无人机
+关注
关注
237文章
11368浏览量
196645 -
光谱传感器
+关注
关注
1文章
89浏览量
15808
发布评论请先 登录
2026新型无人机拦截反制AI模组


无人机智能巡检系统的技术特点与应用优势
无人机多光谱遥感在水生植被精细分类中的应用
离轴技术:赋能无人机精准配送的核心芯片应用
RK3576赋能无人机巡检:多路视频+AI识别引领智能化变革
翼辉信息DUP产品如何助力无人机完成智能化飞行

科普|无人机反制枪介绍

IMU 能为无人机提供什么数据?
适用于无人机的 IMU 有哪些要求?

低空物流:无人机开启未来配送新篇章
高光谱相机如何通过无人机实现地表精准遥感?

光伏场站无人机巡检系统的应用实践
基于算力魔方的智能文档信息提取方案



评论