 步进电机S型曲线加减速的实现
步进电机S型曲线加减速的实现
之前做电机相关的项目比较少,最近有个项目涉及到步进电机的精确控制,参考了一些资料研究了一下S型曲线加减速,这里总结一下分享给大家。
STM32定时器输出PWM,控制驱动器来驱动步进电机。单片机只要控制电机方向,以及PWM的频率即可,具体驱动由驱动器实现。 首先说一下什么是S型曲线加速,为什么要S型曲线加速。
S型曲线加速是指步进电机的启动速度按照S型曲线逐渐增加,以达到设定的最大速度。具体的S型曲线方程如下:
 x取值-5~5的曲线图如下:
x取值-5~5的曲线图如下: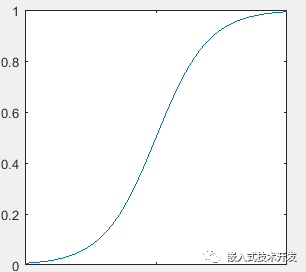 可以看到,刚开始加速和达到最大速度时加速比较缓慢,中间加速比较快。电机的转矩和转速的乘积的k倍等于功率,也就是说,功率一定的时候,转速与转矩成反比关系。所以,转速越低,转矩越大。当电机直接高速启动时,电机可能存在震动、丢步甚至启动不起来的情况。因此需要S型曲线加速,使电机能够缓慢启动。程序实现控制电机的速度,其实就是控制PWM的输出频率。首先需要对S曲线方程进行一些变化,如下:Fcurrent = Fmin + (Fmax-Fmin)/(1+exp( -Flexible(i - num )/num) )
可以看到,刚开始加速和达到最大速度时加速比较缓慢,中间加速比较快。电机的转矩和转速的乘积的k倍等于功率,也就是说,功率一定的时候,转速与转矩成反比关系。所以,转速越低,转矩越大。当电机直接高速启动时,电机可能存在震动、丢步甚至启动不起来的情况。因此需要S型曲线加速,使电机能够缓慢启动。程序实现控制电机的速度,其实就是控制PWM的输出频率。首先需要对S曲线方程进行一些变化,如下:Fcurrent = Fmin + (Fmax-Fmin)/(1+exp( -Flexible(i - num )/num) )-
Fcurrent为计算出的当前频率。
-
Fmin为加速的起始频率。
-
Fmax为加速的最大频率。
-
-Flexible*(i - num)/num是对S型曲线进行拉伸变化,其中Flexible代表S曲线区间(越大代表压缩的最厉害,中间加速度越大;越小越接近匀加速。理想的S曲线的取值为4-6)。
-
i是在循环计算过程中的索引,从0开始。
-
num为 加速脉冲数/2 大小。
TIM2_CLOCK_FREQ为定时器的计数频率。 之后要做的就是在加减速过程中,每输出一个PWM脉冲,重新装载一次定时器周期。具体怎样输出指定个数PWM来控制步进电机,可参考之前的文章《STM32定时器产生指定个数脉冲》。在PWM中断中,将计算好的S曲线数组,重新装载到定时器的ARR和CCR寄存器中即可。程序如下://功能:S加速曲线初始化//参数1 *pbuff 计算出的定时器的周期//参数2 fre_max 最大频率 Hz//参数3 fre_min 最小频率 Hz//参数4 len 加速需要的脉冲数void CurveS_init(uint16_t *pbuff,uint32_t fre_max,uint32_t fre_min,int16_t len){int16_t i;uint16_t flexible =4;floatdelt=fre_max-fre_min;floatdeno;float melo ;floatfre;for(i=0; i{melo = flexible* (i-len/2) / (len/2);deno = 1.0f / (1 + expf(-melo)); //fre = delt * deno + fre_min;*pbuff++ = (unsigned short)(TIM2_CLOCK_FREQ / fre);}}
//PWM回调函数void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim){Motor.PWMcount++;SpeedAdjust();//速度调节}//速度调节函数void SpeedAdjust(void){switch(Motor.Status){/*加速*/case SPEED_INCREASE:if(Motor.Count < Motor.CountMax){__HAL_TIM_SET_AUTORELOAD(&htim2,Period[Motor.Count]);//计算下一个PWM的周期htim2.Instance->CCR1 = Period[Motor.Count]/2;//占空比50%Motor.Count++;//加速次数}else{Motor.Status = SPEED_STABLE;Motor.Count--;}break;/*匀速*/case SPEED_STABLE:if(Motor.PWMcount >= (Motor.PWMneed - Motor.Count)){Motor.Status = SPEED_DECREASE;}break;/*减速*/case SPEED_DECREASE:if(Motor.Count >= 0){__HAL_TIM_SET_AUTORELOAD(&htim2,Period[Motor.Count]);//计算下一个PWM的周期htim2.Instance->CCR1 = Period[Motor.Count]/2;Motor.Count--;}if(Motor.PWMcount >= Motor.PWMneed){HAL_TIM_PWM_Stop_IT(&htim2,TIM_CHANNEL_1);}break;default :break;}
其中Motor是自己定义的一个结构体:
启动时,初始化参数,启动定时器输出PWM即可:typedef struct{uint8_t Status; //状态int32_t Count; //加减速过程脉冲计数int32_t CountMax; //最大加速脉冲数uint32_t PWMcount;//PWM计数uint32_t PWMneed; //需要输出的PWM总数}Motor_t;
来看一下效果,可以看到,PWM的频率是逐渐增大的。实际测试效果也不错。//PWM--需要输出的脉冲个数void StartPWM(uint32_t PWM){Motor.PWMcount = 0;Motor.PWMneed = PWM;Motor.Count = 0;Motor.Status = SPEED_INCREASE;Motor.CountMax = 300;//初始化加速曲线,最小频率100,最大频率10K,加速脉冲数300CurveS_init(Period,10000,100,Motor.CountMax);__HAL_TIM_SET_AUTORELOAD(&htim2,Period[0]);htim2.Instance->CCR1 = Period[0];HAL_TIM_PWM_Start_IT(&htim2, TIM_CHANNEL_1); //启动定时器PWM输出}
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
驱动器
+关注
关注
53文章
8255浏览量
146481 -
步进电机
+关注
关注
150文章
3112浏览量
147548
原文标题:步进电机S型曲线加速的实现
文章出处:【微信号:mcu168,微信公众号:硬件攻城狮】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
行星减速步进电机与步进电机的区别
步进电机是一种将电脉冲信号转变为角位移或线位移的开环控制电机。其工作原理是通过电子电路将直流电分为多相序控制电流,使用这种电流给步进电机供电



伺服电机加减速机惯量怎么计算
伺服电机加减速机系统是现代工业自动化领域中常见的一种传动装置,它通过将伺服电机的高速旋转转化为减速机的低速大扭矩输出,实现对负载的精确控制。
stm32控制步进电机加减速的稳定性?
各位:
我最近接了一个项目做agv小车的驱动部分。使用两个定时器和io配合输出脉冲,控制步进电机。控制上没问题,但是加减速和转弯的过程不是很平稳,放一杯水在上边晃动的很厉害。我是用的方法就是匀速变化
发表于 05-06 07:21
如何用stm32f103zet6控制伺服电机的加减速运动?
想用stm32f103zet6控制伺服电机的加减速运动,不知该怎么做,请大神指教。具体情况是有个机械凸轮,有一根顶杆顶着凸轮边沿,随着凸轮转动及其外径的变化,水平顶杆会沿水平方向作直线运动。现在可以
发表于 04-30 08:00

如何快速开发高性能步进电机控制驱动系统RS485 UART通讯Modebus协议防丢步节能静音驱动TMCM1290
实现复杂的运动控制逻辑,提高系统的自动化水平。
三、高级功能
EightPoint加减速曲线:TMCM-1290采用EightPoint加减速曲线
发表于 03-10 20:44
解析步进电机三轴联动的快速加减速算法研究
步进电机具有快速启停能力强、高、转速容易控制的特点。但是,步进电动机应避免转动速率的突变,而且从停止到开始转动有一个较低的起动频率,随后才可以平缓地过渡到较高的转速。相应地在步进
发表于 01-19 14:55
•1425次阅读





 工商网监
工商网监
评论