 RT-Thread记录(十三、I/O 设备模型之PIN设备)
RT-Thread记录(十三、I/O 设备模型之PIN设备)
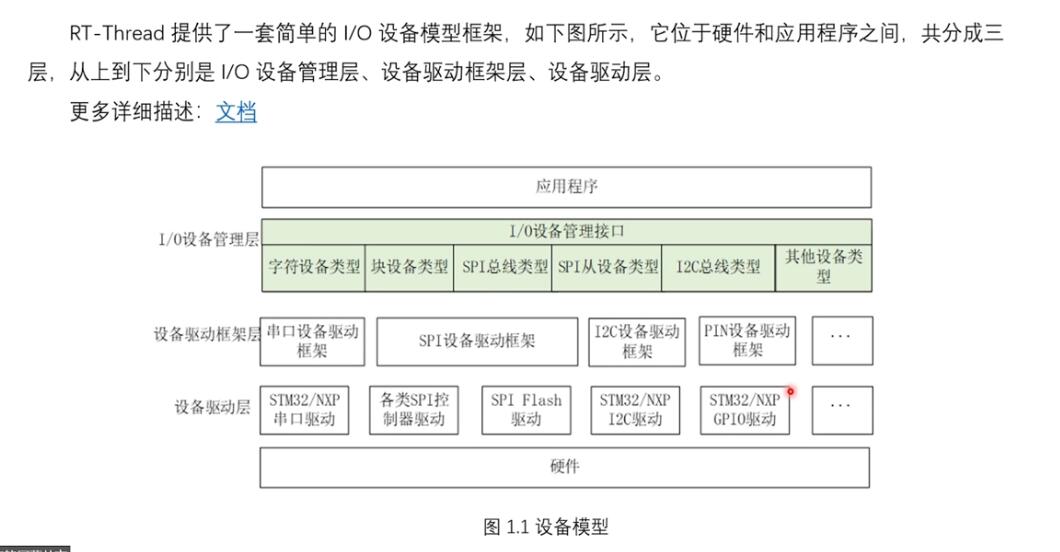
讲完UART设备之后,我们已经熟悉RT-Thread I/O 设备模型了,回头看看基本的 PIN 设备。
目录
前言
一、PIN 设备模型解析
1.1 初识 GPIO 操作函数
1.2 PIN 设备框架
1.3 PIN 设备驱动框架层
实现的函数
PIN 设备控制块
注册函数
1.4 PIN 设备驱动层
实现的函数
初始化函数
☆引脚定义☆
二、PIN 设备操作函数
2.1 获取 PIN 索引号方法
2.2 操作函数
2.2.1 设置 GPIO 模式
2.2.2 设置/ 读取 GPIO 电平
2.2.3 绑定/脱离中断回调函数
2.2.4 使能中断
三、PIN 设备示例
结语
前言
我们学习一个 MCU 的最基本的 GPIO 口,也就是 PIN 设备模型,我们还没有讲过,至于原因之前也说了,因为 PIN 设备的操作函数与我们介绍的 I/O 设备模型的通用函数名称不太对应,对于新手来说先将 PIN 设备可能会让人难以理解。
所以前面的文章我们先讲了 UART 设备模型,从源码分析了一下 UART 设备的设计思路,从设备驱动层,和设备驱动框架层再到 I/O 设备管理层,最后到应用层,我们都理过一遍。
有了前面的经验,本文我们就来学习了解 RT-Thread PIN设备 。
❤️
本 RT-Thread 专栏记录的开发环境:
RT-Thread记录(一、RT-Thread 版本、RT-Thread Studio开发环境 及 配合CubeMX开发快速上手)
RT-Thread记录(二、RT-Thread内核启动流程 — 启动文件和源码分析)
❤️
RT-Thread 设备篇系列博文链接:
RT-Thread记录(十、全面认识 RT-Thread I/O 设备模型)
RT-Thread记录(十一、I/O 设备模型之UART设备 — 源码解析)
RT-Thread记录(十二、I/O 设备模型之UART设备 — 使用测试)
一、PIN 设备模型解析
一直说到 PIN 设备有点特殊,和我们讲 I/O 设备模型时候的设备感觉有一点区别的,那么到底怎么个特殊法?我们还是需要具体来分析一下:
1.1 初识 GPIO 操作函数
我们还是从上层的 I/O 设备管理层来开始,看看 PIN 设备管理层提供的访问 GPIO 的接口有哪些:
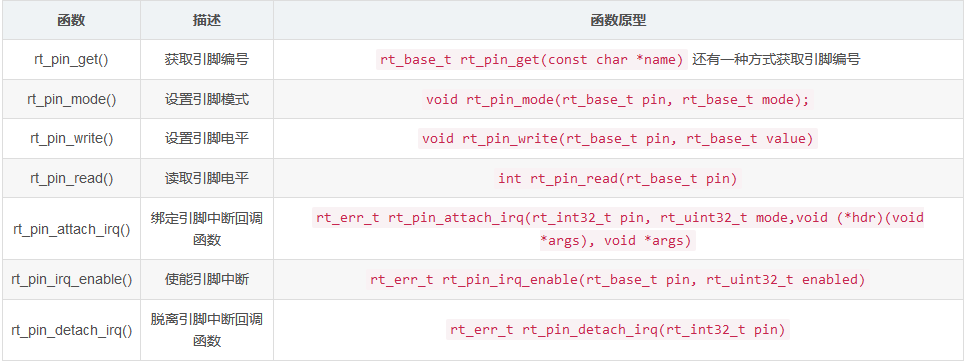
我们可以发现,上面的 PIN 设备管理接口的操作函数,与我们将的通用的函数完全不一样,如下图:
这也是为什么我们将设备示例的时候没有先讲 PIN 设备的原因,怕很多小伙伴刚开始不理解,那么为什么会这样呢?
1.2 PIN 设备框架
我们通过前面的 UART 设备的分析,已经知道了设备的基本的框架了,首先我们来看一下 上一篇文章讲到的 UART 设备框架:

对于 PIN 设备来说,框架总结如下图表:

❤️ 前面一直说 PIN 设备有点特别,那只不过是因为官方说明中 应用程序调用的不是 I/O 设备管理层的接口函数,而是直接调用的 PIN 设备驱动框架层的接口函数:

知道了这一点的话,其实我们都不需要进行过多的分析,具体的过程分析可以查看前面几篇博文,我们这里只需要对 PIN 设备驱动框架层 和 设备驱动层的接口简单的了解一下,毕竟 GPIO 的操作还是很简单的。
1.3 PIN 设备驱动框架层
通过上面的说明,我们知道 PIN 设备的使用是直接调用的 设备驱动框架层的接口,所以我们来看看 PIN 设备驱动框架层的文件(pin.c)有哪些函数接口:
实现的函数
//私有的
static struct rt_device_pin _hw_pin;
static rt_size_t _pin_read(rt_device_t dev, rt_off_t pos, void *buffer, rt_size_t size)
static rt_size_t _pin_write(rt_device_t dev, rt_off_t pos, const void *buffer, rt_size_t size)
static rt_err_t _pin_control(rt_device_t dev, int cmd, void *args)
//可调用的
int rt_device_pin_register(const char *name, const struct rt_pin_ops *ops, void *user_data);
/* Get pin number by name,such as PA.0,P0.12 */
rt_base_t rt_pin_get(const char *name);
void rt_pin_mode(rt_base_t pin, rt_base_t mode);
void rt_pin_write(rt_base_t pin, rt_base_t value);
int rt_pin_read(rt_base_t pin);
rt_err_t rt_pin_attach_irq(rt_int32_t pin, rt_uint32_t mode,
void (*hdr)(void *args), void *args);
rt_err_t rt_pin_detach_irq(rt_int32_t pin);
rt_err_t rt_pin_irq_enable(rt_base_t pin, rt_uint32_t enabled);
挑一个函数简单看看:
/* RT-Thread Hardware PIN APIs */
void rt_pin_mode(rt_base_t pin, rt_base_t mode)
{
RT_ASSERT(_hw_pin.ops != RT_NULL);
_hw_pin.ops->pin_mode(&_hw_pin.parent, pin, mode);
}
函数先断言判断_hw_pin.ops这个结构体是否有效,有效的情况下就设置引脚的模式。
第一个参数是引脚的索引号(这个在我们下面讲解 PIN 设备驱动层的时候会有说明什么是索引号),
第二个参数是引脚模式(具体的模式我们也会再下面讲解GPIO 设置时候统一说明)。
PIN 设备控制块
在 RT-Thread 中 PIN 设备作为一个对象,那么肯定有他的对象控制块,和我们前面学习的所有的对象一样,在pin.h中有 PIN 设备的对象结构体:
/* pin device and operations for RT-Thread */
struct rt_device_pin
{
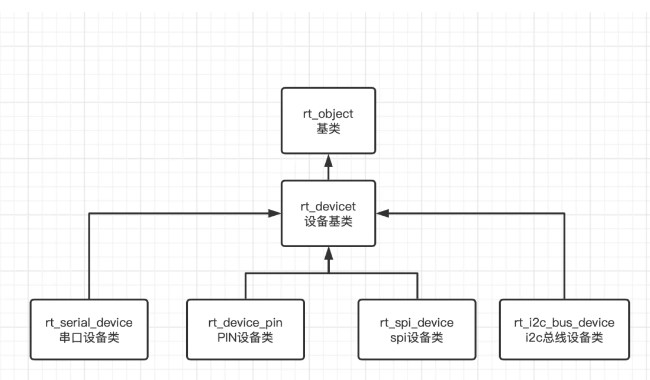
struct rt_device parent; // rt_device 我们前面讲过的,所有 device 的父类
const struct rt_pin_ops *ops;
};
struct rt_pin_ops
{
void (*pin_mode)(struct rt_device *device, rt_base_t pin, rt_base_t mode);
void (*pin_write)(struct rt_device *device, rt_base_t pin, rt_base_t value);
int (*pin_read)(struct rt_device *device, rt_base_t pin);
/* TODO: add GPIO interrupt */
rt_err_t (*pin_attach_irq)(struct rt_device *device, rt_int32_t pin,
rt_uint32_t mode, void (*hdr)(void *args), void *args);
rt_err_t (*pin_detach_irq)(struct rt_device *device, rt_int32_t pin);
rt_err_t (*pin_irq_enable)(struct rt_device *device, rt_base_t pin, rt_uint32_t enabled);
rt_base_t (*pin_get)(const char *name);
};
❤️ PIN 设备的访问函数都是在 PIN 设备控制块中的结构体成员 ops 中实现的,也是通过这个结构体成员与 底层驱动层关联起来 —— 在设备驱动层定义rt_pin_ops类型的变量,实现这些操作函数。
注册函数
在 PIN设备初始化的时候,rt_hw_pin_init()会调用 rt_device_pin_register 函数进行 PIN 设备的初始化。
PIN 设备注册函数,使用这个注册函数,可以绑定底层驱动层的函数,也同时将设备接口提供给上层 I/O 设备管理层:
int rt_device_pin_register(const char *name, const struct rt_pin_ops *ops, void *user_data)
{
_hw_pin.parent.type = RT_Device_Class_Miscellaneous;
_hw_pin.parent.rx_indicate = RT_NULL;
_hw_pin.parent.tx_complete = RT_NULL;
#ifdef RT_USING_DEVICE_OPS
_hw_pin.parent.ops = &pin_ops;
#else
_hw_pin.parent.init = RT_NULL; //PIN 设备不需要
_hw_pin.parent.open = RT_NULL; //
_hw_pin.parent.close = RT_NULL; //
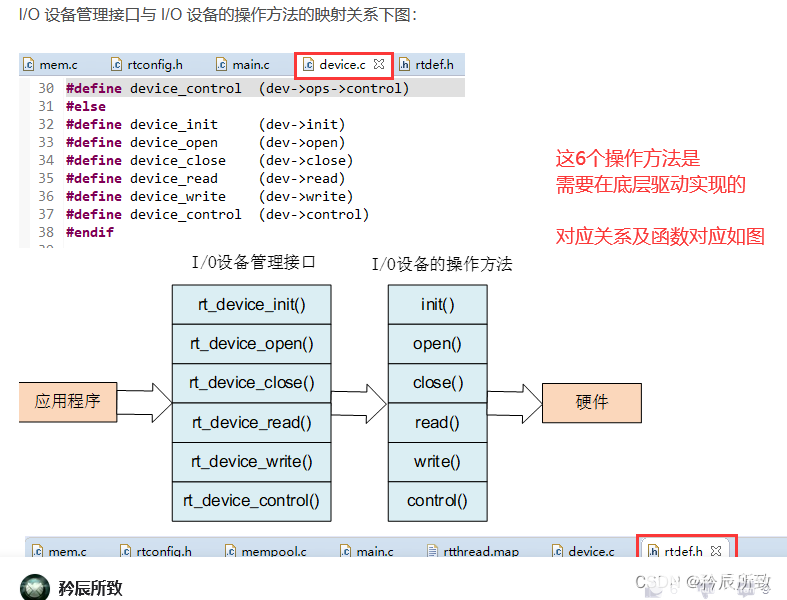
_hw_pin.parent.read = _pin_read; //* 把设备的read操作绑定在pin.c的_pin_read函数 */
_hw_pin.parent.write = _pin_write; //同上
_hw_pin.parent.control = _pin_control; //同上
#endif
/*
把drv_gpio.c所实现的_stm32_pin_ops绑定在_hw_pin.ops上
因为 PIN 设备驱动层使用的注册函数为:
rt_device_pin_register("pin", &_stm32_pin_ops, RT_NULL);
*/
_hw_pin.ops = ops;
_hw_pin.parent.user_data = user_data;
/*
register a character device
/* 将其注册进device设备框架中 */
*/
rt_device_register(&_hw_pin.parent, name, RT_DEVICE_FLAG_RDWR);
return 0;
}
在注册函数中:_hw_pin.ops = ops; 这个操作就把设备驱动层实现的硬件操作函数给关联到了 设备驱动框架层。
官方说明的 PIN 设备访问的接口就是在 设备驱动框架层 提供的函数接口。
但是我们看到:
_hw_pin.parent.read = _pin_read; //把设备的read操作绑定在pin.c的_pin_read函数
_hw_pin.parent.write = _pin_write;
_hw_pin.parent.control = _pin_control;
这说明我们不仅可以使用 rt_pin_read 获取 PIN 设备的值,还可以使用 rt_device_read 获取 PIN 设备的值!!!
❤️ 在 RT-Thread 的 PIN 设备模型中, rt_pin_read 函数和 rt_device_read 函数效果一样。
1.4 PIN 设备驱动层
PIN 设备驱动层,直接与硬件打交道的层面,对于我们使用的 STM32 来说,里面的很多操作我们应该都不会陌生,我们也简单了解下里面的函数,主要的目的在于实现 PIN 设备控制块中 rt_pin_ops 成员中的几个函数:
实现的函数
static const struct pin_index *get_pin(uint8_t pin)
static void stm32_pin_write(rt_device_t dev, rt_base_t pin, rt_base_t value)
static int stm32_pin_read(rt_device_t dev, rt_base_t pin)
static void stm32_pin_mode(rt_device_t dev, rt_base_t pin, rt_base_t mode)
rt_inline rt_int32_t bit2bitno(rt_uint32_t bit)
rt_inline const struct pin_irq_map *get_pin_irq_map(uint32_t pinbit)
static rt_err_t stm32_pin_attach_irq(struct rt_device *device, rt_int32_t pin,
rt_uint32_t mode, void (*hdr)(void *args), void *args)
static rt_err_t stm32_pin_dettach_irq(struct rt_device *device, rt_int32_t pin)
static rt_err_t stm32_pin_irq_enable(struct rt_device *device, rt_base_t pin,
rt_uint32_t enabled)
/*一个重要的结构体*/
const static struct rt_pin_ops _stm32_pin_ops =
{
stm32_pin_mode,
stm32_pin_write,
stm32_pin_read,
stm32_pin_attach_irq,
stm32_pin_dettach_irq,
stm32_pin_irq_enable,
};
rt_inline void pin_irq_hdr(int irqno)
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
void EXTI0_IRQHandler(void)
...//一系列的外部中断函数
...
int rt_hw_pin_init(void)
我们简单来看一个函数,根本不需要过多的解释:
static void stm32_pin_write(rt_device_t dev, rt_base_t pin, rt_base_t value)
{
const struct pin_index *index;
index = get_pin(pin);
if (index == RT_NULL)
{
return;
}
HAL_GPIO_WritePin(index->gpio, index->pin, (GPIO_PinState)value);
}
初始化函数
初始化函数虽然重要,但是简单,看一下就能明白,首先就是熟悉的 GPIO 时钟初始化,
然后就是调用设备注册函数,设备名称 pin ,也是在这里定义的,如果改成其他的,在 shell 工具中使用 list_device 就会显示其他的名称了。
第二个参数,就是将设备驱动层中实现的对硬件的操作函数关联到 PIN 设备驱动框架层以供应用程序使用用。
int rt_hw_pin_init(void)
{
#if defined(__HAL_RCC_GPIOA_CLK_ENABLE)
__HAL_RCC_GPIOA_CLK_ENABLE();
#endif
#if defined(__HAL_RCC_GPIOB_CLK_ENABLE)
__HAL_RCC_GPIOB_CLK_ENABLE();
#endif
#if defined(__HAL_RCC_GPIOC_CLK_ENABLE)
__HAL_RCC_GPIOC_CLK_ENABLE();
#endif
#if defined(__HAL_RCC_GPIOD_CLK_ENABLE)
__HAL_RCC_GPIOD_CLK_ENABLE();
#endif
#if defined(__HAL_RCC_GPIOE_CLK_ENABLE)
__HAL_RCC_GPIOE_CLK_ENABLE();
#endif
#if defined(__HAL_RCC_GPIOF_CLK_ENABLE)
__HAL_RCC_GPIOF_CLK_ENABLE();
#endif
#if defined(__HAL_RCC_GPIOG_CLK_ENABLE)
#ifdef SOC_SERIES_STM32L4
HAL_PWREx_EnableVddIO2();
#endif
__HAL_RCC_GPIOG_CLK_ENABLE();
#endif
#if defined(__HAL_RCC_GPIOH_CLK_ENABLE)
__HAL_RCC_GPIOH_CLK_ENABLE();
#endif
#if defined(__HAL_RCC_GPIOI_CLK_ENABLE)
__HAL_RCC_GPIOI_CLK_ENABLE();
#endif
#if defined(__HAL_RCC_GPIOJ_CLK_ENABLE)
__HAL_RCC_GPIOJ_CLK_ENABLE();
#endif
#if defined(__HAL_RCC_GPIOK_CLK_ENABLE)
__HAL_RCC_GPIOK_CLK_ENABLE();
#endif
return rt_device_pin_register("pin", &_stm32_pin_ops, RT_NULL);
}
☆引脚定义☆
在驱动文件中,关于 GPIO 引脚的定义方式(STM32为例),我们有必要说明一下。
与 UART 不同的是,GPIO 配置简单能够更直接关联硬件,所以 HAL 库并没有为 GPIO 提供句柄结构体描述,在 HAL 库中描述 GPIO 使用了两个参数:GPIO_TypeDef* GPIOx和GPIO_Pin,比如:
GPIO_PinState HAL_GPIO_ReadPin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
void HAL_GPIO_WritePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState);
void HAL_GPIO_TogglePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
而在 RT-Thread 中,其定义了一个结构体 pin_index,通过一个变量即可描述一个 GPIO,如下:
/* STM32 GPIO driver */
struct pin_index
{
int index;
GPIO_TypeDef *gpio;
uint32_t pin;
};
针对这个结构体,驱动程序中给了一些补充的操作:
/*
相当于结构体pin_index以宏定义的形式被初始化
用C语言字符串连接定义引脚信息
index 引脚的索引号,用户可自行定义的驱动程序定义的引脚编号
gpio 相当于HAL库中的GPIO_TypeDef
gpio_index 相当于HAL库中的GPIO_Pin
例如宏__STM32_PIN(0, A, 0) 就表示结构体内容为 {0, GPIOA, GPIO_PIN_0}
*/
#define __STM32_PIN(index, gpio, gpio_index) \
{ \
index, GPIO##gpio, GPIO_PIN_##gpio_index \
}
//保留未使用的宏定义,有些IO口未使用,使用这个宏定义
#define __STM32_PIN_RESERVE \
{ \
-1, 0, 0 \
}
static const struct pin_index pins[] =
{
#if defined(GPIOA)
__STM32_PIN(0 , A, 0 ),
__STM32_PIN(1 , A, 1 ),
__STM32_PIN(2 , A, 2 ),
__STM32_PIN(3 , A, 3 ),
__STM32_PIN(4 , A, 4 ),
__STM32_PIN(5 , A, 5 ),
__STM32_PIN(6 , A, 6 ),
__STM32_PIN(7 , A, 7 ),
__STM32_PIN(8 , A, 8 ),
__STM32_PIN(9 , A, 9 ),
__STM32_PIN(10, A, 10),
__STM32_PIN(11, A, 11),
__STM32_PIN(12, A, 12),
__STM32_PIN(13, A, 13),
__STM32_PIN(14, A, 14),
__STM32_PIN(15, A, 15),
#if defined(GPIOB)
__STM32_PIN(16, B, 0),
__STM32_PIN(17, B, 1),
//后面省略很多......
首先宏定义#define __STM32_PIN(index, gpio, gpio_index) :
其中##为C语言连接符,其功能是在带参数的宏定义中将两个子串(token)联接起来,从而形成一个新的子串,例如宏__STM32_PIN(0, A, 0) 就表示结构体内容为 {0, GPIOA, GPIO_PIN_0},就等于定义了一个pin_index结构体。
然后宏定义__STM32_PIN_RESERVE :
预留的IO楼,有些IO口未使用,使用这个宏定义
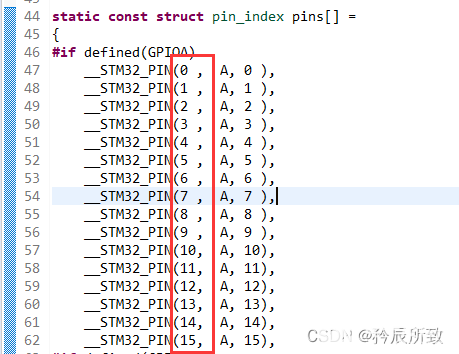
接下来的结构体数组pins :
pins 为pin_index结构体类型的数组,RT-Thread 使用 pins 数组对 所有的 GPIO 引脚进行初始化定义。
这样就相当于芯片上所支持的 IO 口都进行了初始化定义,每一个 GPIO 都有了一个对应的索引号index。
在 RT-Thread 提供的 PIN 设备操作函数中void rt_pin_mode(rt_base_t pin, rt_base_t mode);, 他的第一个参数也不是类似 PIN设备控制块之类的数据结构,而是一个引脚索引号,就是对应的上面这个index。
引脚中断的分析和 引脚定义类似,可自行查看代码,这里就不过多说明。
二、PIN 设备操作函数
文章开头我们虽然已经认识过 PIN 设备的操作函数,但是我们没有对函数参数可取值做说明,学习 API 的使用还是老样子,直接放函数原型然后看注释。
2.1 获取 PIN 索引号方法
在我们使用某个 GPIO 的时候,第一步要做的就是获取 GPIO 的索引号,即上文说到的index。因为对 PIN 设备的访问操作都是通过这个索引号进行的。
在 RT-Thread 中,提供了 3种方式获取 PIN 设备索引号:
方法一: 使用函数rt_pin_get():
在 pin.c 文件中提供了一个函数:
rt_base_t rt_pin_get(const char *name)
里面的参数为一个名字,那么这个名字是什么呢?在函数申明有注释:

对于STM32而言,使用示例如下:
//获取索引号
pin_number = rt_pin_get("PA.9"); // pin_number 就是索引号
//设置GPIO模式
rt_pin_mode(pin_number , PIN_MODE_INPUT_PULLUP);
方法二: 使用宏定义GET_PIN:
在drv_common.h文件中有宏定义,可以直接获取 GPIO 的索引号:
#define __STM32_PORT(port) GPIO##port##_BASE
#define GET_PIN(PORTx,PIN) (rt_base_t)((16 * ( ((rt_base_t)__STM32_PORT(PORTx) - (rt_base_t)GPIOA_BASE)/(0x0400UL) )) + PIN)

对于STM32而言,使用示例如下:
//获取索引号
#define LED0_PIN GET_PIN(B, 9)
//LED0 点亮或者熄灭
#define LED0(n) (n ? rt_pin_write(LED0_PIN, PIN_HIGH) : rt_pin_write(LED0_PIN, PIN_LOW))
方法三: 查看驱动文件drv_gpio.c:
上面讲解 PIN 设备驱动层的时候说到过,所有的 GPIO 对应的索引号都会在驱动文件中定义,直接查看文件使用索引号就可以:
对于STM32而言,使用示例如下:
//对应驱动文件,下面的代码含义就是 设置 PA0 的模式为 PIN_MODE_INPUT_PULLUP
rt_pin_mode(0, PIN_MODE_INPUT_PULLUP);
说明,查看驱动文件的方式并不直观。
2.2 操作函数
操作函数说明老样子
2.2.1 设置 GPIO 模式
/*
参数 描述
pin 引脚编号:索引号
mode 引脚工作模式
工作模式可选:
#define PIN_MODE_OUTPUT 0x00 输出
#define PIN_MODE_INPUT 0x01 输入
#define PIN_MODE_INPUT_PULLUP 0x02 上拉输入
#define PIN_MODE_INPUT_PULLDOWN 0x03 下拉输入
#define PIN_MODE_OUTPUT_OD 0x04 开漏输出
*/
void rt_pin_mode(rt_base_t pin, rt_base_t mode);
2.2.2 设置/ 读取 GPIO 电平
设置引脚电平:
/*
参数 描述
pin 引脚编号
value 电平逻辑值,
value 取值:
PIN_LOW 低电平,
PIN_HIGH 高电平
*/
void rt_pin_write(rt_base_t pin, rt_base_t value);
读取引脚电平:
/*
参数 描述
pin 引脚编号
返回
PIN_LOW 低电平
PIN_HIGH 高电平
*/
int rt_pin_read(rt_base_t pin);
2.2.3 绑定/脱离中断回调函数
绑定中断回调函数:
/*
参数 描述
pin 引脚编号
mode 中断触发模式
hdr 中断回调函数,用户需要自行定义这个函数
args 中断回调函数的参数,不需要时设置为 RT_NULL
返回 ——
RT_EOK 绑定成功
错误码 绑定失败
其中 mode 可选参数:
#define PIN_IRQ_MODE_RISING 0x00 上升沿触发
#define PIN_IRQ_MODE_FALLING 0x01 下降沿触发
#define PIN_IRQ_MODE_RISING_FALLING 0x02 边沿触发(上升沿和下降沿都触发)
#define PIN_IRQ_MODE_HIGH_LEVEL 0x03 高电平触发
#define PIN_IRQ_MODE_LOW_LEVEL 0x04 低电平触发
*/
rt_err_t rt_pin_attach_irq(rt_int32_t pin, rt_uint32_t mode,
void (*hdr)(void *args), void *args);
脱离中断回调函数:
/*
参数 描述
pin 引脚编号
返回 ——
RT_EOK 脱离成功
错误码 脱离失败
*/
rt_err_t rt_pin_detach_irq(rt_int32_t pin);
说明:引脚脱离了中断回调函数以后,中断并没有关闭,还可以调用绑定中断回调函数再次绑定其他回调函数。
2.2.4 使能中断
绑定好引脚中断回调函数后需要使用下面的函数使能引脚中断:
/*
参数 描述
pin 引脚编号
enabled 状态
返回 ——
RT_EOK 使能成功
错误码 使能失败
enabled 可取 2 种值之一:
PIN_IRQ_ENABLE (开启)
PIN_IRQ_DISABLE (关闭)
*/
rt_err_t rt_pin_irq_enable(rt_base_t pin, rt_uint32_t enabled);
三、PIN 设备示例
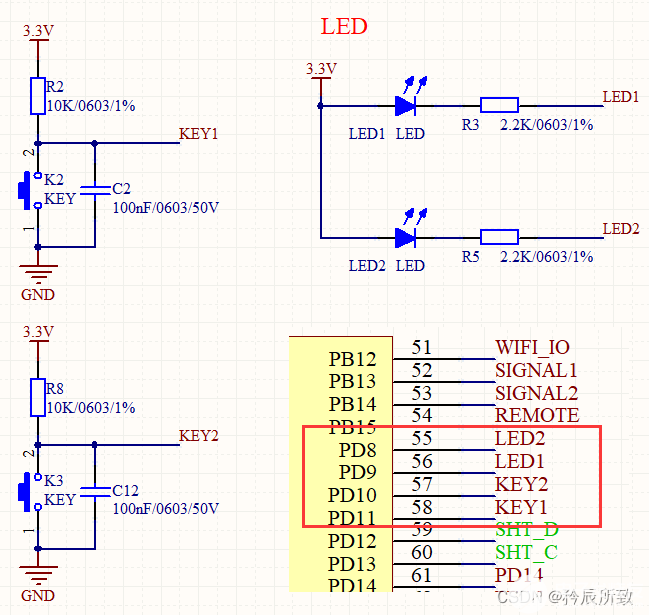
只要明白了PIN 设备模型原理,使用起来还是很简单的,我们先看一下原理图:
程序如下,测试OK,太简单所以没有什么好说的:
...
//添加这两个头文件
#include
#include "board.h"
...
static struct rt_thread led1_thread; //led1线程
static char led1_thread_stack[256];
static rt_thread_t key1_thread = RT_NULL; //
#define LED1_PIN GET_PIN(D, 9)
#define LED2_PIN GET_PIN(D, 8)
#define KEY1_PIN GET_PIN(D, 11)
#define KEY2_PIN GET_PIN(D, 10)
#define key1_read rt_pin_read(KEY1_PIN)
#define LED1_ON rt_pin_write(LED1_PIN, PIN_LOW);
#define LED1_OFF rt_pin_write(LED1_PIN, PIN_HIGH);
#define LED2_ON rt_pin_write(LED2_PIN, PIN_LOW);
#define LED2_OFF rt_pin_write(LED2_PIN, PIN_HIGH);
//#define LED0(n) (n ? rt_pin_write(LED0_PIN, PIN_HIGH) : rt_pin_write(LED0_PIN, PIN_LOW))
static void led1_thread_entry(void *par){
while(1){
LED1_ON;
rt_thread_mdelay(1000);
LED1_OFF;
rt_thread_mdelay(1000);
}
}
static void key1_thread_entry(void *par){
while(1){
if(key1_read == 0){
rt_thread_mdelay(10); //去抖动
if(key1_read == 0){
rt_kprintf("key1 kicked..\r\n");
}
while(key1_read == 0){rt_thread_mdelay(10);//去抖动
}
}
rt_thread_mdelay(1);
}
}
int main(void)
{
MX_USART1_UART_Init();
// MX_GPIO_Init(); //使用设备模型不需要初始化这个
/*配置LED管脚为输出*/
rt_pin_mode(LED1_PIN, PIN_MODE_OUTPUT);
rt_pin_mode(LED2_PIN, PIN_MODE_OUTPUT);
/*配置按键为输入*/
rt_pin_mode(KEY1_PIN, PIN_MODE_INPUT);
rt_pin_mode(KEY2_PIN, PIN_MODE_INPUT);
/*LED默认状态*/
rt_pin_write(LED1_PIN, 1);
rt_pin_write(LED2_PIN, 0);
rt_err_t rst2;
rst2 = rt_thread_init(&led1_thread,
"led1_blink ",
led1_thread_entry,
RT_NULL,
&led1_thread_stack[0],
sizeof(led1_thread_stack),
RT_THREAD_PRIORITY_MAX -1,
50);
if(rst2 == RT_EOK){
rt_thread_startup(&led1_thread);
}
key1_thread = rt_thread_create("key1_control",
key1_thread_entry,
RT_NULL,
512,
RT_THREAD_PRIORITY_MAX -2,
50);
/* 如果获得线程控制块,启动这个线程 */
if (key1_thread != RT_NULL)
rt_thread_startup(key1_thread);
...//后面省略
结语
本文我们详细的分析了 RT-Thread I/O 设备模型之PIN设备,最终看来,使用 PIN 设备模型操作还是特别的简单的。
其实关键的部分还是在于理解 PIN 设备模型的原理,理解了以后使用起来也更加的得心应手。
GPIO设备虽然简单,但是文章写下来也1W多字了,即便以前对 PIN 设备有点模糊,只要看了本文,相信大家肯定有拨云见日的感觉!
希望大家多多支持!本文就到这里,谢谢!
审核编辑:汤梓红
-
GPIO
+关注
关注
16文章
1216浏览量
52309 -
PIN
+关注
关注
1文章
305浏览量
24396 -
RT-Thread
+关注
关注
31文章
1305浏览量
40337
发布评论请先 登录
相关推荐
RT-Thread记录(十、全面认识 I/O 设备模型)
RT-Thread记录(十四、I/O 设备模型之ADC设备)








 工商网监
工商网监
评论