 OpenCV预训练SVM行人HOG特征分类器实现多尺度行人检测
OpenCV预训练SVM行人HOG特征分类器实现多尺度行人检测

HOG概述
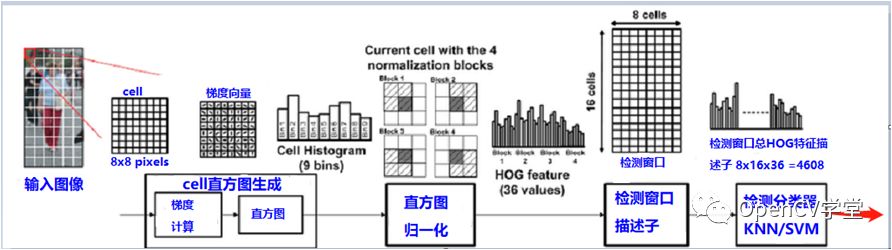
HOG(Histogram of Oriented Gradient)特征在对象检测与模式匹配中是一种常见的特征提取算法,是基于本地像素块进行特征直方图提取的一种算法,对象局部的变形与光照影响有很好的稳定性,最初是用HOG特征来来识别人像,通过HOG特征提取+SVM训练,可以得到很好的效果,OpenCV已经有了。HOG特征提取的大致流程如下:

详细解读
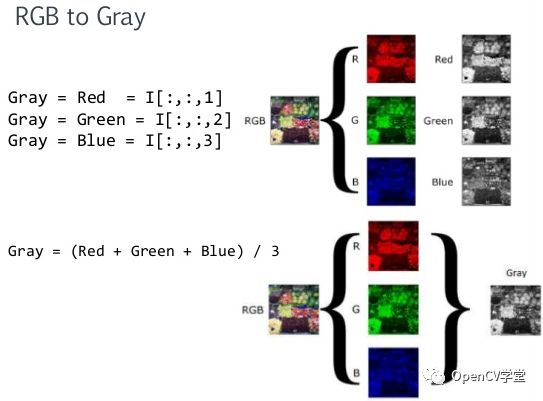
第一步:灰度化
对HOG特征提取来说第一步是对输入的彩色图像转换为灰度图像,图像灰度化的方法有很多,不同灰度化方法之间有一些微小的差异,从彩色到灰度的图像转换可以表示如下:
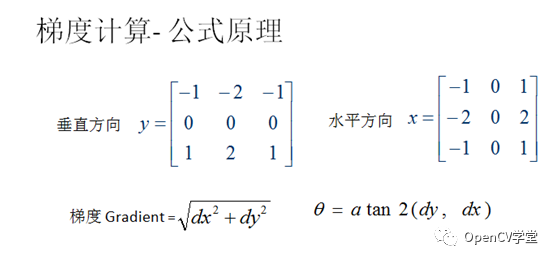
第二步:计算图像梯度
计算图像的X方向梯度dx与Y方向梯度dy,根据梯度计算mag与角度,计算梯度时候可以先高斯模糊一下(可选步骤),然后使用sobel或者其它一阶导数算子计算梯度值dx、dy、mag、angle:
第三步:Cell分割与Block
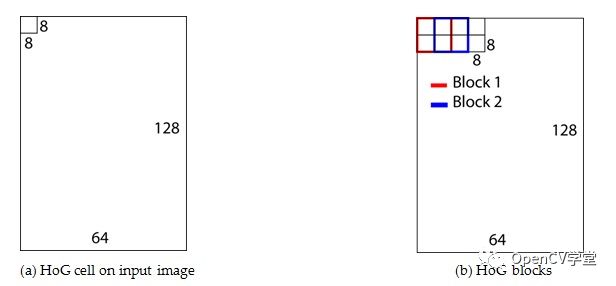
对于图像来说,分成8x8像素块,每个块称为一个Cell,每个2x2大小的Cell称为一个Block,每个Cell根据角度与权重建立直方图,每20度为一个BIN,每个Cell得到9个值、每个Block得到36个值(4x9), 图像如下:
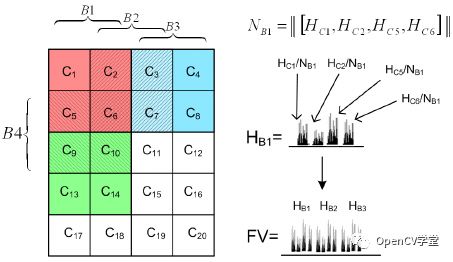
每个Block为单位进行L2数据归一化,作用是抵消光照/迁移影响,L2的归一化的公式如下:
第四步:生成描述子
对于窗口64x128范围大小的像素块,可以得到8x16个Cell, 使用Block在窗口移动,得到输出的向量总数为7x15x36=3780特征向量,每次Block移动步长是八个像素单位,一个Cell大小。
使用HOG特征数据
HOG特征本身是不支持旋转不变性与多尺度检测的,但是通过构建高斯金字塔实现多尺度的开窗检测就会得到不同分辨率的多尺度检测支持。OpenCV中HOG多尺度对象检测API如下:
virtualvoidcv::detectMultiScale( InputArrayimg, std::vector< Rect >&foundLocations, doublehitThreshold=0, SizewinStride=Size(), Sizepadding=Size(), doublescale=1.05, doublefinalThreshold=2.0, booluseMeanshiftGrouping=false ) Img-表示输入图像 foundLocations-表示发现对象矩形框 hitThreshold-表示SVM距离度量,默认0表示,表示特征与SVM分类超平面之间 winStride-表示窗口步长 padding-表示填充 scale-表示尺度空间 finalThreshold-最终阈值,默认为2.0 useMeanshiftGrouping-不建议使用,速度太慢拉
使用OpenCV预训练SVM行人HOG特征分类器实现多尺度行人检测的代码如下:
importcv2ascv if__name__=='__main__': src=cv.imread("D:/images/pedestrian.png") cv.imshow("input",src) hog=cv.HOGDescriptor() hog.setSVMDetector(cv.HOGDescriptor_getDefaultPeopleDetector()) #Detectpeopleintheimage (rects,weights)=hog.detectMultiScale(src, winStride=(4,4), padding=(8,8), scale=1.25, useMeanshiftGrouping=False) for(x,y,w,h)inrects: cv.rectangle(src,(x,y),(x+w,y+h),(0,255,0),2) cv.imshow("hog-detector",src) cv.waitKey(0) cv.destroyAllWindows()
原文标题:HOG特征详解与行人检测
文章出处:【微信公众号:OpenCV学堂】欢迎添加关注!文章转载请注明出处。
-
分类器
+关注
关注
0文章
153浏览量
13834 -
OpenCV
+关注
关注
33文章
652浏览量
45068 -
HOG特征
+关注
关注
0文章
2浏览量
996
原文标题:HOG特征详解与行人检测
文章出处:【微信号:CVSCHOOL,微信公众号:OpenCV学堂】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
【幸狐Omni3576边缘计算套件试用体验】YOLO26 板端部署
自动驾驶毫米波雷达真的识别不到行人吗?

【上海晶珩睿莓 1 单板计算机】人脸识别
没有专利的opencv-python 版本
基于级联分类器的人脸检测基本原理
在Ubuntu20.04系统中训练神经网络模型的一些经验
多光谱图像颜色特征用于茶叶分类的研究进展

海康威视大模型精准检测守护高速安全
零成本钢铁侠手套!树莓派+OpenCV 秒变手势遥控器!

如何使用树莓派与OpenCV实现面部和运动追踪的云台系统?
如何使用树莓派+OpenCV实现姿态估计和面部特征点追踪?
【Milk-V Duo S 开发板免费体验】SDK编译、人脸检测、OpenCV测试
基于LockAI视觉识别模块:手写数字识别

基于RV1126开发板实现自学习图像分类方案




评论