 工业机器人的构成和分类
工业机器人的构成和分类

工业机器人按照ISO 8373定义,它是面向工业领域的多关节机械手或多自由度的机器人。工业机器人是自动执行工作的机器装置,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
——维基百科
01
工业机器人构成
工业机器人主要由主体、驱动系统和控制系统三个基本部分组成。
主体 -即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。大多数工业机器人有3-6个运动自由度,其中腕部通常有1-3个运动自由度;
驱动系统 -包括动力装置和传动机构,核心为减速器以及伺服电机,用以使执行机构产生相应的动作;
控制系统 -是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。
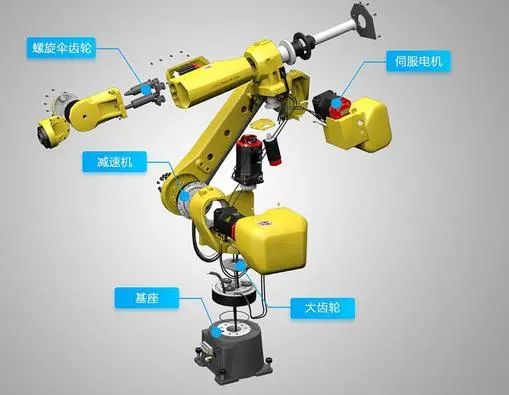
工业机器人拆解图
02
工业机器人分类
关于工业机器人的分类,国际上没有指定统一的标准,可按负载重量、控制方式、自由度、结构、应用领域等划分。
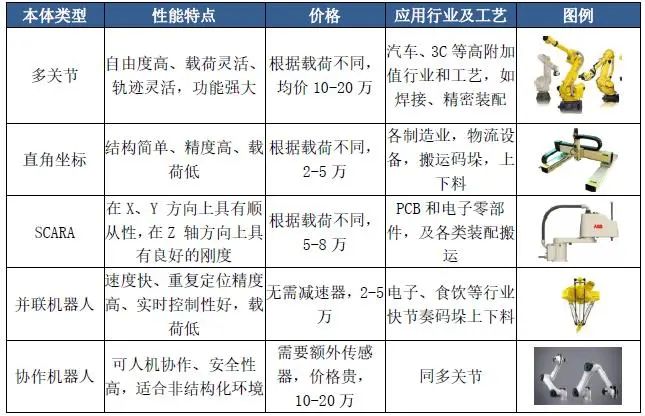
按照结构形态分类如下:
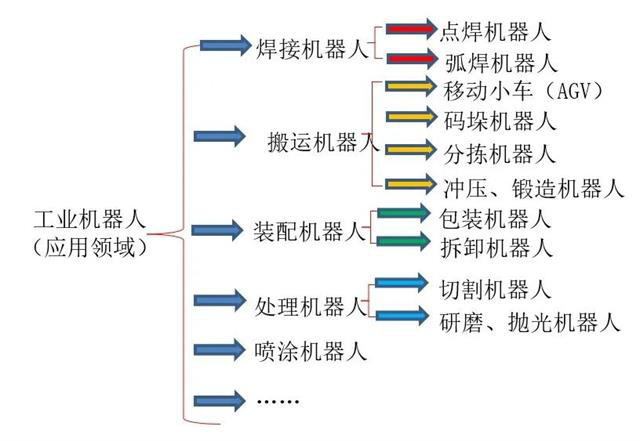
按照应用分类如下:
03
工业机器人产业链
工业机器人产业链主要是由机器人零部件生产企业、机器人本体生产企业、代理商、系统集成商、最终用户构成。本体是机器人产业链的核心,通常,本体企业设计本体、编写软件,采购通过代理商销售给系统集成商,系统集成商直接面向终端客户。有的本体企业和代理商也会兼做系统集成商。

从地区来看,欧洲、日本牢牢占据着工业机器人天下,日本、德国的工业机器人水平 世界 领先,这主要因为他们具备先发优势和技术沉淀。日本在工业机器人关键零部件(减速机、伺服电机等)的研发方面具备较强的技术壁垒。德国工业机器人在原材料、本体零部件和系统集成方面有一定优势。
从企业来看,ABB、发那科(FANUC)、库卡(KUKA)和安川电机(YASKAWA)这四家企业是工业机器人的四大家族,成为世界主要的工业机器人供货商,占据世界约 50% 的市场份额。
04
工业机器人工作原理
机器人的工作原理是一个比较复杂的问题。简单地说,机器人的原理就是模仿人的各种肢体动作、思维方式和控制决策能力。从控制的角度,机器人可以通过如下四种方式来达到这一目标。
“示教再现”方式:它通过“示教盒”或人“手把手”两种方式教机械手如何动作,控制器将示教过程记忆下来,然后机器人就按照记忆周而复始地重复示教动作,如喷涂机器人。
“可编程控制”方式:工作人员事先根据机器人的工作任务和运动轨迹编制控制程序,然后将控制程序输入给机器人的控制器,起动控制程序,机器人就按照程序所规定的动作一步一步地去完成,如果任务变更,只要修改或重新编写控制程序,非常灵活方便。大多数工业机器人都是按照前两种方式工作的。
“遥控”方式:由人用有线或无线遥控器控制机器人在人难以到达或危险的场所完成某项任务。如防暴排险机器人、军用机器人、在有核辐射和化学污染环境工作的机器人等。
“自主控制”方式:是机器人控制中最高级、最复杂的控制方式,它要求机器人在复杂的非结构化环境中具有识别环境和自主决策能力,也就是要具有人的某些智能行为。
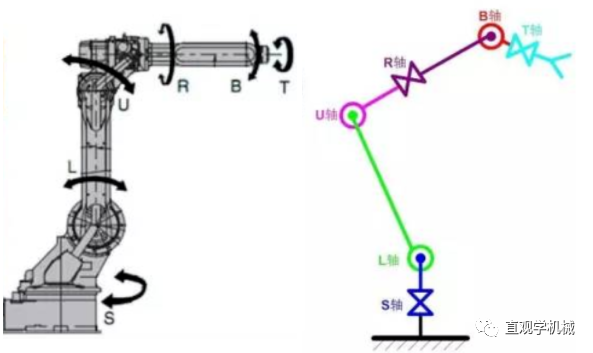
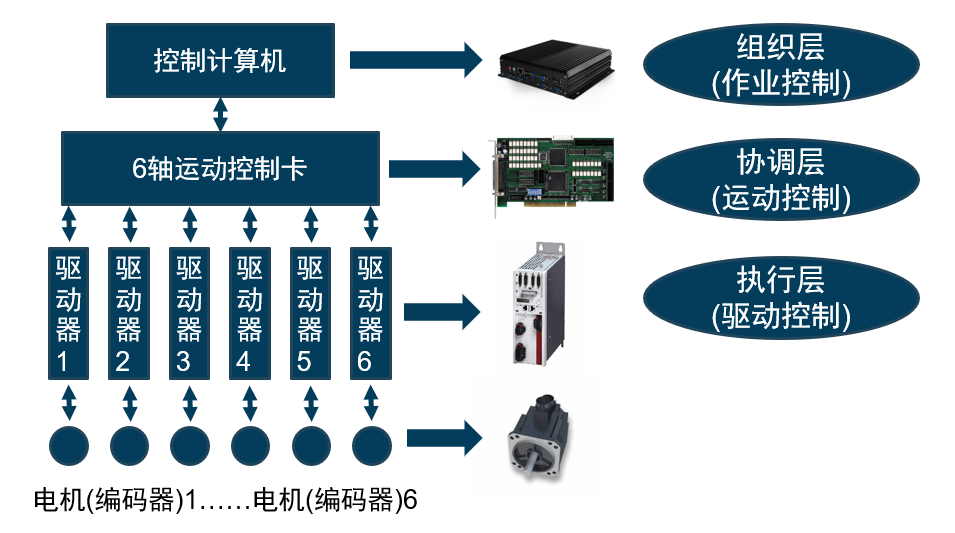
以六轴垂直多关节机器人为例(如下图),通过机器人控制器及其控制系统,可实现S轴回旋,L轴下臂倾动,U轴上臂倾动,R轴手臂横摆,B轴手腕俯仰以及T轴的手腕回旋,实现六个轴的动作操作与配合。
如采用集中式控制系统,其控制原理将如下图所示:
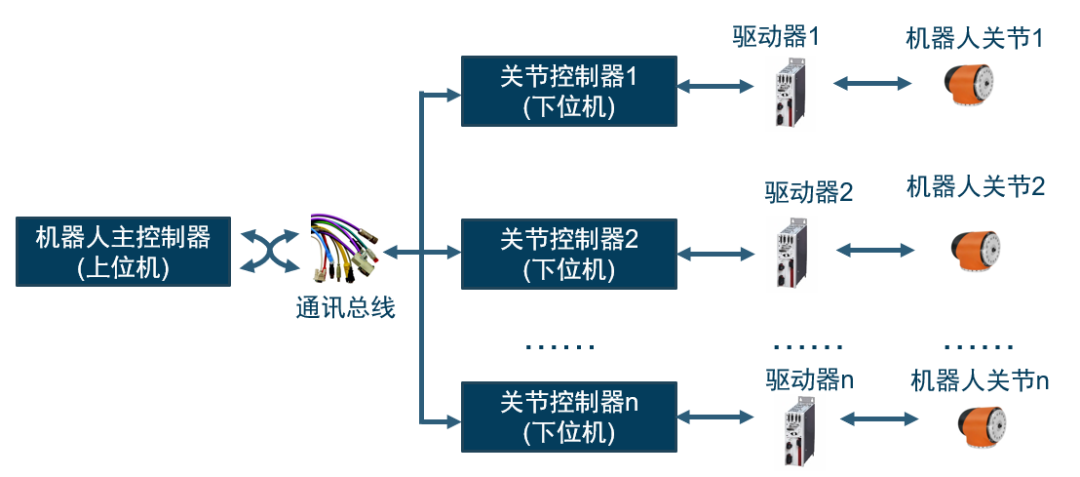
而如果采用分布式控制系统,其控制原理又将如下图所示:
05
工业机器人厂商面临的一些问题
随着工业制造业不断的产业升级,以及各种新技术的涌现,机器人制造商在生产过程中,也要考虑其终端用户的使用需求,例如一些工厂和产线的升级改造,机器人厂商也需要适应市场变化,做出相应调整。
审核编辑 :李倩
-
驱动系统
+关注
关注
3文章
417浏览量
28681 -
制造业
+关注
关注
9文章
2544浏览量
57382 -
工业机器人
+关注
关注
91文章
3557浏览量
98614
原文标题:工业机器人的构成和分类,终于搞明白了。。。
文章出处:【微信号:robotqy,微信公众号:机械自动化前沿】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
基于米尔RK3576核心板的国产割草机器人解决方案
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
Neway电机方案在机器人技术方面的优势
破解柔性生产难题:知识驱动具身智能工业机器人的实战应用指南

普渡机器人发布轻载重工业配送机器人PUDU T150 ,拓宽工业自动化应用边界
工业机器人TOP1,切入人形机器人赛道,意欲何为?

高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
瑞芯微RK3588:工业机器人的“决策中枢”与智造新范式
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
工业机器人线束揭秘 | 性能加持助力机器人作业效率稳定跃升

工业机器人的特点

工业通信界的“月老”:CC\\-Link IE和DeviceNet如何牵起机器人的“红线”
工业机器人与协作机器人概念不同




评论