 基于VCSEL阵列和MPPC阵列的远距离高速激光成像系统
基于VCSEL阵列和MPPC阵列的远距离高速激光成像系统
据麦姆斯咨询报道,近期,复旦大学信息科学与工程学院刘克富教授课题组开发了一套基于2×6 VCSEL阵列和32×32 MPPC阵列图像传感器的激光成像样机,完成了距离标定,并进行了相关实验研究。该系统的帧频可达10kHz,120m范围内的探测概率可达86.23%,在不同反射率下的最大漂移误差约为0.6m。在70m左右的距离能够实现车辆的3D成像,水平空间分辨率小于5cm。通过计算直方图质心,十次拍摄(车牌)的平均测距精度在10cm以内。通过时间门控方法(time-gating method)可以提高探测概率。经过多次测量,在阳光下能够实现120m透窗激光成像。
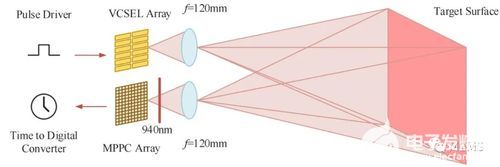
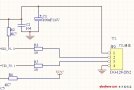
激光成像系统模块图
激光雷达(LiDAR)是一种3D成像技术,广泛应用于增强现实(AR)、汽车、机器视觉、航天器导航和着陆等许多领域。泛光照明方案是一种使用非扫描激光成像方法的闪光式激光雷达(Flash LiDAR),可以获取目标场景的3D图像(关键输出内容)。Flash LiDAR成像原理类似于闪光式相机,即通过测量激光到目标表面每个像素的飞行时间来重建3D空间中的目标图像,激光阵列发射以在短时间内照亮整个视场,然后高灵敏度阵列探测器收集回波信号以构建3D图像。该成像技术具有成像速度快、体积小的优点,其图像分辨率取决于探测器的像素总数,横向分辨率取决于相邻像素的间距。
2013年,Niclass开发了一种具有32像素的数字多像素光子计数器(digital multi-pixel photon counter,MPPC)阵列,每个像素由6×2单光子雪崩二极管(single photon avalanche diode, SPAD)组成,这是第一个专门为LiDAR应用设计的具有背景鲁棒性的阵列。通过1D扫描,其实现了340×90的图像分辨率、170°×4.5°的视场(FoV)、0.5°×0.05°的角分辨率和10Hz的帧频。
2017年,Perenzoni设计了一款基于64 × 64 2D阵列MPPC探测器(每个像素包含8个SPAD)的闪光式成像LiDAR,其最大成像距离为367m,测量精度为20cm,帧频为7.7Hz。
2019年,Hutchings设计了一种256×256 SPAD阵列,可以在光子计数模式下工作,每个像素包含4×4 SPAD,其实现了50m的最大探测距离、1.2°×1.2°的FoV、0.02°×0.02°的角分辨率和30Hz的帧频。
2020年,Seo使用63通道线阵MPPC探测器(每个像素包含4个SPAD)设计了一种最大探测距离为48m、探测精度为0.85cm、视场角为120°的1D扫描激光雷达,其角分辨率为0.05°×0.2°,图像分辨率高达2200×36,帧频为1.18Hz。
2021,Padmanabhan设计了一种256×128 SPAD阵列,可以在光子计数模式下工作,形成一种16×16 SPAD阵列,其探测距离为10m,视场角为2°×2°,角分辨率为0.16°×0.16°,最大图像分辨率可达128×12。
2021年,Kumagai设计了一种183×600 SPAD阵列,可以在3×4或4×4聚合模式下工作,探测距离高达300m,精度为30cm,视场为25.2°× 9.45°,角分辨率为0.15°×0.15°,图像分辨率最高可达168×63。其在行场扫描模式下工作,一次扫描一行,帧频为20Hz。
理论上,与单点激光测距系统相比,Flash LiDAR激光发射能量需要增加数倍来补偿。因为这种方案在像素之间的无效区域中存在不必要的激光能量损耗,可以称为“野蛮”方案。为实现远距离3D成像,解决回波功率密度低的问题,复旦大学的研究人员从三个方面给出了提高探测概率和探测精度的方法。
首先,通过减小视场角,使激光发射聚焦在较小的区域,以便激光脉冲在相同功率下可以传输得更远。通过改变焦距,激光雷达可以适应不同的探测范围。
其次,激光收发器采用垂直腔面发射激光器(VCSEL)阵列和MPPC阵列,以组成一种收发器阵列,既增加了发射功率,又增加了接收面积,因此可以在距离较远和回波信号较弱的情况下探测光子。
最后,采用时间门控方法进一步抑制背景辐射的影响,从而最大限度地利用每次发射的激光功率,并在信号统计处理后延长激光探测距离。
研究人员采用的是由12个VCSEL芯片组成的2×6 VCSEL阵列模块。每个芯片中有110个发射孔,因此发射孔总数为1320个。经透镜均匀化后,输出光束形状接近正方形。
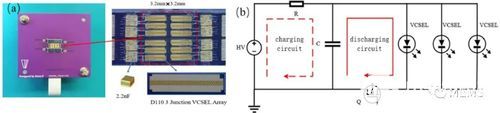
(a)VCSEL阵列模块;(b)VCSEL驱动电路示意图
MPPC阵列探测器采用日本滨松(Hamamatsu)产品,型号为S15013-0125NP-01,由32×32通道MPPC组成,每个MPPC包含12个SPAD,每个通道分别与时间数字转换器(TDC)电路集成,分辨率为312.5ps。
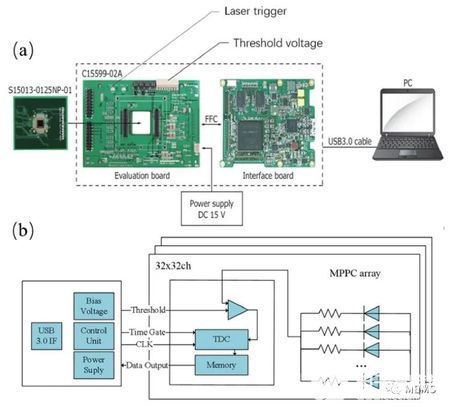
(a)MPPC阵列及其评估电路;(b)评估板连接框图
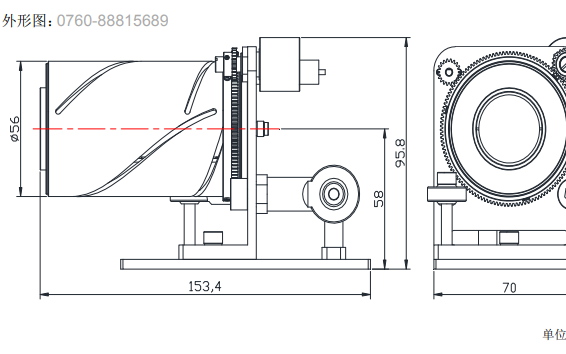
这项研究采用带940nm窄带滤光片(FWHM = 10nm)的同轴光收发器。该收发器中的透镜焦距可调,最大焦距达120mm,光学孔径为46mm。由于32×32 MPPC阵列的感光面积约为4mm×4mm,根据几何光学的基本原理,该成像系统在120m处的探测面积约为4m。
研究人员从以下六个方面对激光成像系统进行了实验研究:
1、动态阈值对探测概率的影响
2、激光强度对激光成像的影响
3、回波激光强度对探测概率的影响
4、目标反射率对漂移误差的影响
5、无时间门控的车辆激光成像
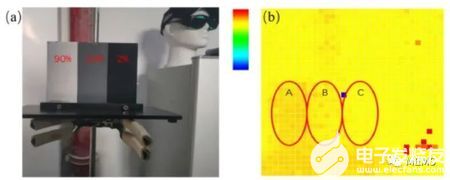
6、强背景光下的时间门控激光成像
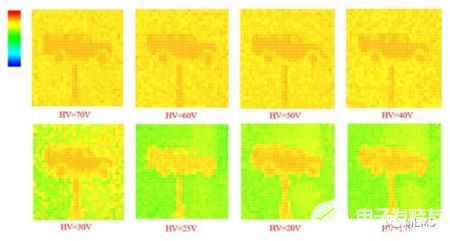
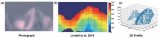
不同激光强度下TDC数据的伪彩色显示
相关实验结果表明,该激光成像系统的帧频可以达到10kHz,通过将阈值设置为1p.e,120m距离的探测概率可以达到86.23%,在衰减比为1000×的情况下,探测概率下降到1.40%。由于多次发射激光可以提高探测能力,因此计算出系统的探测范围可以达到1km,探测概率不低于1%,对于10kHz的激光重复频率,帧频可以达到100Hz。在不同反射率下,激光成像系统的漂移误差在0.6m以内。漂移误差主要受激光脉冲宽度和光强的影响,进一步减小激光脉冲宽度和增加激光输出功率将有助于减少漂移误差。在70m左右距离能够实现车辆的3D成像,水平空间分辨率小于5cm,通过计算直方图的质心,十次拍摄(车牌)的平均测距精度在10cm以内。使用时间门控方法可以提高探测概率。经过多次测量,在阳光下能够实现120m的透窗激光成像。
(a)漂移误差实验平台;(b)TDC数据的伪彩色显示
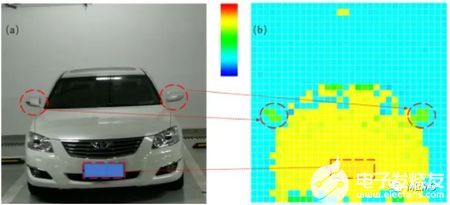
(a)近距离车辆CMOS摄像机成像;(b)TDC数据的伪彩色显示
该激光成像系统具有体积小、重量轻、探测速度快等优点,可用于自动驾驶仪和航天器飞行控制领域。其高速和高灵敏度的特性还可以进一步开发其他潜在应用,这将有助于促进该技术的不断发展。

银月光科技深耕健康智慧光源,向市场提供全品类紫外UVA UVB UVC LED,红外IR LED VCSEL产品和方案服务,在国内外市场拥有数百家优质合作伙伴,共同推动用光科技创造健康智慧生活的事业。
审核编辑:汤梓红
-
图像传感器
+关注
关注
68文章
1925浏览量
129759 -
VCSEL
+关注
关注
17文章
272浏览量
30174 -
成像系统
+关注
关注
2文章
199浏览量
13996 -
激光雷达
+关注
关注
969文章
4042浏览量
190558
发布评论请先 登录
相关推荐
自动驾驶激光雷达新型探测器:近红外MPPC

YS-LAS-01远距离激光照明镜头的数据手册免费下载
中科院成功验证调频连续波远距离成像的能力
MicroVision远距离汽车激光雷达性能可期
Lumentum新款多结VCSEL阵列提高了性能标准
中国科学技术大学实现超过200公里的远距离单光子三维成像






 工商网监
工商网监
评论