 智慧城市:智能交通系统中的激光雷达案例
智慧城市:智能交通系统中的激光雷达案例
智慧城市议程的一个方面是智能交通系统的部署。旧金山市交通局 (SFMTA) 使用激光雷达传感器的试点项目展示了激光雷达如何为该市的智能交通信号试点提供解决方案,这是旧金山零愿景政策的一部分。
该市“零愿景”政策的目标是改善道路安全,因为据认为每年约有 30 人在旧金山街头旅行时丧生,另有 200 多人受重伤。在这个更大的框架内进行智能交通信号试点的目标是探索使用多模式智能交通信号系统 (MMITSS)、专用短程通信 (DSRC)、交通信号优先 (TSP) 和紧急车辆抢占 (EVP) ) 为紧急和运输车辆提供优先权的技术。此外,MMITSS 还应该能够检测行人和自行车,为他们提供领先的间隔、加扰和/或受保护的相位。
于 2020 年 1 月结束的第一个概念验证在五个十字路口部署了激光雷达传感器,并展示了以 96% 的准确率准确匿名地分析数据的能力。第二个概念验证期望将数据层添加到信号控制网络中,以启用 ITS 中的“智能”;这项工作正在进行中,预计将于 2021 年初完成。
我们采访了两位相关人士,他们对这项技术、其部署和获得的结果有所了解,在这里我们展示了对话的重点。首先,我们采访了激光雷达传感器技术提供商 Quanergy 的首席营销官 Enzo Signore。然后,我们与 SFMTA 项目的独立战略执行顾问 Paul Hoekstra 一起深入研究了实际的概念验证项目。
激光雷达:匿名跟踪对象的 ID
Quanergy 的 Enzo Signore解释了激光雷达技术在此类应用中的优势,需要人员和车辆计数和流量管理,尤其是在禁止面部识别的情况下。
激光雷达技术在体育场和智能城市等应用中的关键价值主张是能够匿名跟踪经过各种传感器点的物体。例如,一辆汽车会经过很多十字路口,或者行人会经过很多区域。Quanergy 可以做的是为对象分配一个 ID,该 ID 将在被监控区域的整个旅程中与对象保持一致。
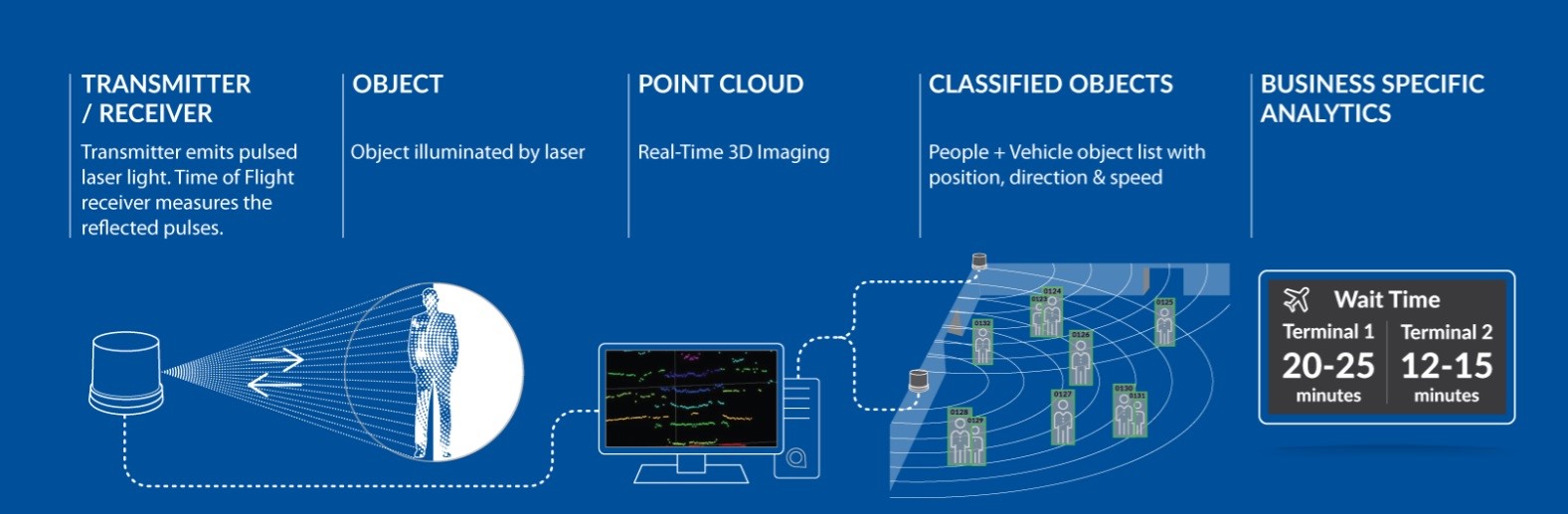
激光雷达是一种飞行时间传感技术,它可以脉冲低功率、人眼安全的激光,并测量激光完成传感器和目标之间的往返行程所需的时间。生成的聚合数据用于生成 3D 点云图像,提供空间位置和深度信息以识别、分类和跟踪移动对象。(图片:Quanergy)
这样做非常复杂,因为当您经过多个交叉路口时,您需要多个传感器和多个服务器来进行边缘计算。大多数技术只会对他们正在管理的区域有一个孤立的视图,当跨越一个区域和另一个区域之间的边界时,ID 将会丢失,您将获得另一个 ID。使用这种方法,您开始忘记所有的人流。
我们有一种称为自动 ID 交接的技术,可以将人或车辆的 ID 从一个区域传递到另一个区域。因此,只要我们有视野,相同的 ID 就会与对象保持一致。这提供了非常好的端到端可见性和跟踪。这对于机场很重要,例如从路边到登机口,您可以优化乘客体验,以及购物中心和城市。每个人的单一 ID 有助于实现端到端分析。
Quanergy 的传感器 M 系列提供长距离检测,例如专为流量管理应用而设计的 MQ-8。以下是这些传感器的不同之处。典型的激光雷达传感器具有对称的光束配置。如果您将传感器平放,则通常一半的光束会射向天空,一半的光束会射向地面。如果它安装在 3 米高的路灯柱上,俯视行人视野,那么在这种配置中,一半的光束被浪费了。
在我们的设计中,所有的光束实际上都指向下方,从而能够对称地覆盖地面。这意味着当一个人走过视野时没有盲点。这使得能够在视野范围内的任何地方不间断地跟踪人员或车辆。我们可以看到一个最大范围为 70m(即:15,000 平方米)的物体。这是一个非常大的区域,否则需要许多摄像机才能实现类似的覆盖范围。因此,这减少了传感器的数量以及成本。
克服与面部识别相关的隐私问题
SMTA 的 Paul Hoekstra描述了在 3rd Street的五个十字路口实施第一个概念验证 (PoC) 背后的想法和结果,并计划扩大覆盖范围。
我们于 2019 年 4 月开始与 SFMTA、思科和 Quanergy 作为该项目的合作伙伴合作。最初作为思科软件包的一部分,我们拥有 DSRC 传感器。我们发现我们只是用它们来听走廊里和我们正在覆盖的高速公路上的所有汽车。我们发现只有不到 1% 的汽车实际上会广播 DSRC 信号。从这个用例的角度来看,结论是不能使用 DSRC 进行流量测量。它只是不足以做出决定。
在这个时间点,我们现在已经完成了第一个(PoC)与 Quanergy 传感器,现在我们正处于第二个 PoC 的中间。
在第一个 PoC 中,我们使用了 20 个激光雷达传感器,将它们安装在 3 rd Street 的五个十字路口,靠近去年开放的新篮球场。我们使用运行 Quanergy QORTEX 软件的 Cisco TRX 进行边缘计算。来自激光雷达的数据通过 TRX 盒,Qortex 软件将数据发布到网络,该网络将进入数据中心,这是一个运行 Cisco Kinetic 平台的小型 VM 集群,存储所有消息——每周 3000 万条。
每个星期天都会在上面发布报告,一份关于车辆的报告,通过交叉路口的激光雷达 ID 识别车辆,并带有一大堆属性,比如时间、星期几、它来自哪里、去哪里、多久停止一次,停止多长时间,速度是多少,是否有事件(来自事件日历)。这样,我们就可以连接所有的十字路口,并跟随车辆通过走廊。然后我们可以说,“这是在走廊南侧进入北行的数量,然后关闭了多少,等等”。
我们使用 Quanergy 的 QORTEX 对其进行了校准,并达到了 96% 的准确度。您不能只用激光雷达计算 ID;您必须构建逻辑以确保出口中的 ID 与入口中的 ID 相同。有了这个逻辑,我们可以跟随汽车通过十字路口。我们有定义什么是停止的逻辑。因此,我们最终达到了 96% 的准确度,它非常精确。对于行人,通过我们定义的区域,您可以看到该人是在路边上还是在路边外。您可以查看一个人是在人行横道的边界之内还是之外。你可以看到一辆车离这个人有多近。有了这种数据,我们就可以创建未遂事故报告。我们已经定义了near misses是什么——向量、速度,然后计算它们碰撞的时间,以及它是否在一定的范围内,然后你称之为near miss。
这之所以成为可能,是因为来自 QORTEX 的数据非常精确,我们无需识别任何人就可以看到。我们不会存储任何可识别的个人信息。一个人只是一个点。而汽车只是一个街区,你不知道它是什么车。我们根据大小进行分类。

在第二个概念验证中,10 个传感器覆盖了旧金山的一条更大的交通走廊,沿着 Channel 和 20th Street 之间的 3rd Street(图片:Paul Hoekstra)
第一个 PoC 是关于分析的。在第二个中,我们正在扩大交叉点的数量。所以现在我们有五个,我们要去十个。换句话说,一个更大的走廊。
然后,我们将对当前锁定在机柜内的所有数据进行分层。在机柜中有一个信号控制器,控制器上有许多执行器。这些可能是循环检测车辆、行人按钮或轻轨中的传感器。有交通信号优先级。所有这些都位于嵌入式信号控制器中。
所以我们现在正在做的是实现与信号控制器的双向信息交换,从交叉路口获取所有数据,例如激光雷达数据和对象分类(同样完全匿名),在站台和公交车站。这些传感器的对象分类(全部在传感器上处理)将为我们提供人数以及他们的分类——例如,是否有人坐在轮椅上,是否有人推着婴儿车,或者他们是否有一辆自行车。许多这些因素将决定运输车辆的停留时间。我们想知道根据那里有多少人预测的停留时间。
从后端系统中,我们将获取车辆数量。然后通过分析,我们可以确定是需要 20 秒的停留时间还是 32 秒的停留时间。然后我们可以推断所有 10 个交叉点,
将整个交通走廊视为一个网络
要优化整个走廊,我们无法在不准确了解人员和车辆的位置以及持续时间的情况下进行。这意味着我们将整个走廊视为一个网络,而不是一个单独的节点。这意味着我们以高频率运行算法,现在我们正在讨论是否需要超过 1 赫兹,我们每秒钟重新计算一次。
然后我们实际上告诉信号控制器,你应该在北行绿灯。这关闭了循环。从思科的供应链工作中学习,您知道这是您通过交叉路口移动物品的唯一方法。所有的技术都是可用的,但它只优化了所有的孤岛。通过这种方式,我们正在以一种新的范式,即综合交通管理方式向前迈进一大步。
旧金山已经有 7,000 台摄像机。但是相机只能给你一张 2D 图片。位置的精度不如使用激光雷达所能达到的精度。激光雷达总是在雨中,在晚上工作。它与隐私问题相去甚远。当人们知道他们正在被跟踪,或者他们可以被识别时,就会出现人们不信任政府来保护他们的问题。
该项目的成果是使应急车辆在处理紧急情况时具有优先权,优化交通时间和停靠点,甚至在没有公共交通的情况下将汽车排成一列,以便更有效地通过走廊。
审核编辑 黄昊宇
-
智能交通
+关注
关注
12文章
805浏览量
43502 -
激光雷达
+关注
关注
968文章
3993浏览量
190105 -
智慧城市
+关注
关注
21文章
4269浏览量
97495
发布评论请先 登录
相关推荐
全场景适用!TS Spectrum高速数字化仪在激光雷达系统中的应用
毫米波雷达在智能交通系统中的作用
智慧交通在智能城市中的应用
激光雷达在城市规划中的应用
物联网系统中的高精度测距方案_单点TOF激光雷达

一文看懂激光雷达


智慧交通包括哪些系统?
晶振在激光雷达系统中的作用有哪些
当美国的5G智慧城市建设,开始用上国产激光雷达






 工商网监
工商网监
评论