 为什么要对移动条件FB PSPS进行编程呢
为什么要对移动条件FB PSPS进行编程呢
对移动条件 FB ONL (仅当)进行编程:
应用移动条件是为了能有目的地让机器人停机,例如出现故障情况或者在锁闭的时候。
用此指令可编程设定机器人行驶的条件(布尔算子)。 在需要时,可对多个算子 (最多到 11 个)进行逻辑连接。 如果该机器人移动的条件不再能满足,则机器人将停止。
移动条件 FB ONL 将在向目标点运动的过程中与 PLC 触发器不同步地激活。并且保持激活状态直至编定了新的移动条件 FB ONL或 FB PSPS 程序。

只要满足下列条件,则机器人将一直移动:输入端 100 为 TRUE。如果输入端为 FALSE,则机器人将停止。
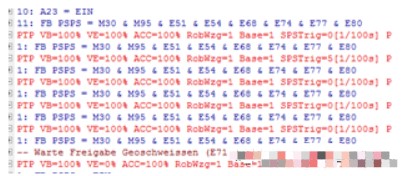
对移动条件 FB PSPS 进行编程:
应用移动条件是为了能有目的地让机器人停机,例如出现故障情况或者在锁闭的时候。
用此指令可编程设定机器人行驶的条件(布尔算子)。 在需要时,可对多个算子 (最多到 11 个)进行逻辑连接。 如果该机器人移动的条件不再能满足,则机器人将停止。
移动条件 FB PSPS 将在目标点处激活,或在用 PLC 触发器定义的到达目标点之前的一个时间点处激活。并且保持激活状态直至编程设定了新的移动条件FBPSPS 或移动条件 FB ONL。
移动条件 FB PSPS 将覆盖之前程序编定的移动条件 FB ONL.

只要满足下列条件,则机器人将一直移动:输入端 200 为 TRUE。如果输入端为 FALSE,则机器人将停止。
大众程序中广泛使用了FB PSPS,例如:
审核编辑:刘清
-
plc
+关注
关注
5010文章
13271浏览量
463057 -
可编程
+关注
关注
2文章
860浏览量
39811 -
触发器
+关注
关注
14文章
2000浏览量
61132
原文标题:对移动条件 FB ONL 和FB SPS 进行编程
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
西门子流量累计FB块介绍
百问FB网络编程 - 网络编程简介
欧姆龙协作机器人TM25S可使用多种方法进行编程

请问一下TLV320aic33的驱动配置需要什么条件呢?
需要对两个信号(10M的信号)进行去相位差的运算,如何消除或者补偿电路对两信号相位差的改变?
在使用示波器时,为什么要对探头进行补偿?
可编程晶振如何设置呢
加上拉电阻后的整体波形为什么可以向上移动呢?
要对500KHZ的信号进行AM调制,是不是只能用晶体管?
晶振能否直接替换,需要什么条件呢?
使用hbird-e-sdk对demo_nice进行编译时,需要对demo_nice.c文件进行修改哪些地方?

能否不使用ITCM就对Flash进行编程呢?
如何对状态指示灯进行编程






 工商网监
工商网监
评论