 如何快速上手CANoe总线设计与开发
如何快速上手CANoe总线设计与开发
导读:作为汽车工程师,汽车CAN通信是必须掌握的,还记得刚在汽车公司工作一个月的时候,在labcar学习的时候,一个同事从身边走过,我只知道她是汽车网络工程师,那时候由于对汽车内部结构并不是很了解,所以就问她。你们网络工程师是干嘛的啊,不就是那种高端车上的手机互联吗?如今再回想起当时提出的问题,真的想钻个洞把自己埋起来,没脸见同事了。
一、CAN总线是什么
CAN总线,并不是他很能,只是一个缩写。CAN:Controller Area Network。控制器局域网络总线。
绝大多数汽车制造厂商采用CAN总线来实现汽车内部控制系统之间的数据通信,CAN总线也叫CAN BUS。
BUS?恩,这不是公交的意思么,没错,公共汽车是可以运输大量的乘客的,CAN通信也就可以传输大量的信号。下边这个图片很形象
CAN总线
简单的说,CAN总线就是用于传输数据的通信协议。
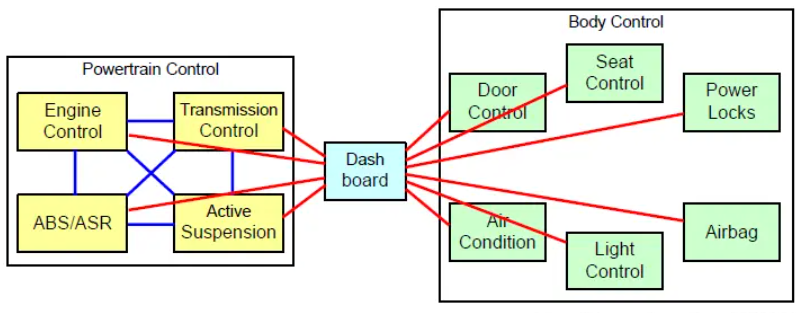
传统汽车线束连接
缺点:
需要大量的信号传输线
针脚数增加
线路复杂
想想:线束增加了这么多,重量大了,生产成本高了,主机厂能不心疼么,而且故障率也高。
二、CANoe开发测试分析
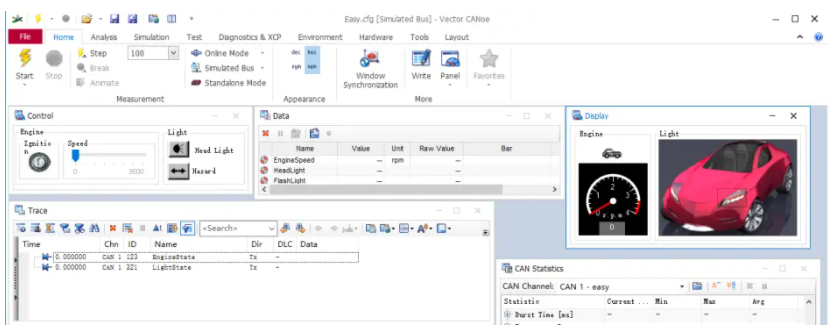
汽车电子在整车研发中占据非常重要的地位,汽车内部涉及到ECU之间的总线通信变得越来越复杂。而CANoe就是开发测试分析整个ECU网络和单个ECU通信而设计的总线通信分析工具,从概念设计到测试验证,再到批量生产,CANoe的使用贯穿整个研发流程。 CANoe软件图标及软件初始界面如下图:
CANoe具体CANoe软件的操作,可以参考我原创的精品视频教程《如何快速上手CANoe总线设计与开发》,后续的文章会进行补充
CANoe界面DBCCAN总线通讯的主要载体是报文,信号是报文的主要组成部分,没有DBC数据库,就无法解析信号。DBC相当于一部针对通信内容的百科辞典。在用CANoe软件读取信号的时候,需要加载DBC。通过CANoe中tools打开CANdb++
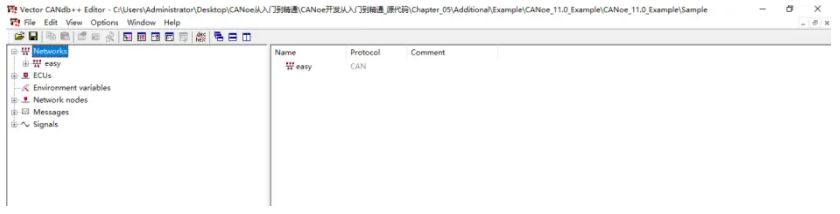
db++CANdb++的里面有两个主要的工作区
1、网络拓扑区域

2、相关对象的详细信息

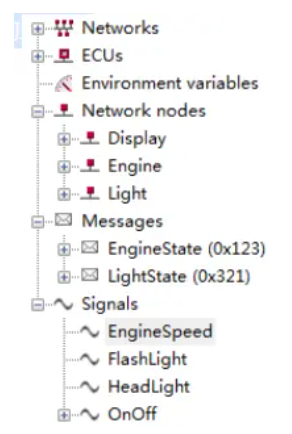
DBC主要数据对象

节点
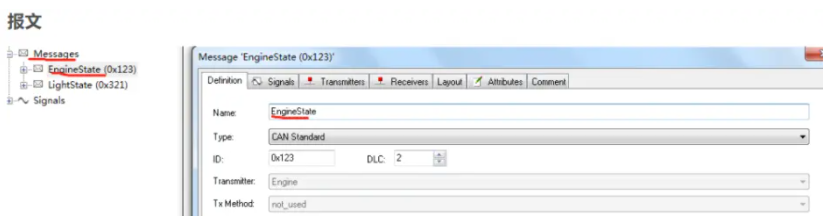
报文
报文右侧的相关对象区域包含内容:定义(名称、帧格式、ID、DLC、发送方、周期)、接收方、属性、信号布局
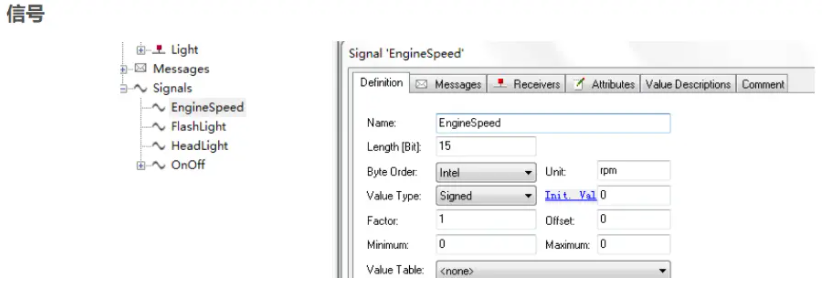
信号信号右侧的相关对象区域包含内容:
信号配置包括定义,报文映射,属性
物理值=总线值*比例因子+偏移量
信号排布
motorola型:高字节在前,低字节在后
Intel型:相反
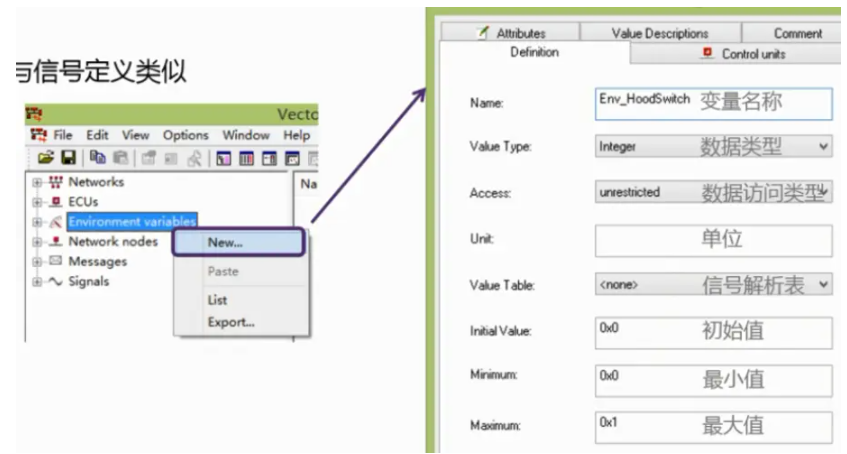
环境变量总之,在信号与报文、报文与节点关联完成后,就可以在通信矩阵中观察他们的收发关系。对应的信号矩阵,就是确定了他们收发关系的信号矩阵excel表。 供应商在开发ECU软件的时候,主机厂是必须要提供其设计版的信号矩阵,明确具体的ECU收发的报文及对应的信号。通常情况下会包括如下部分(以车速为例介绍下):
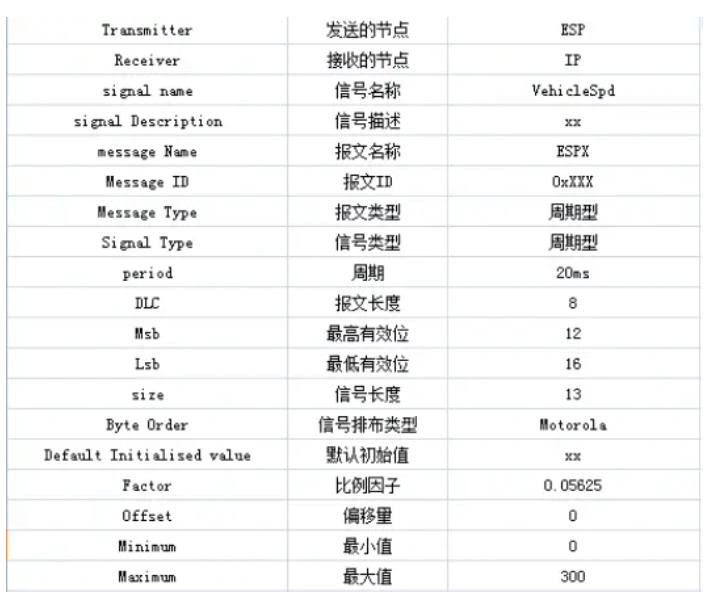
个别信息解释如下:
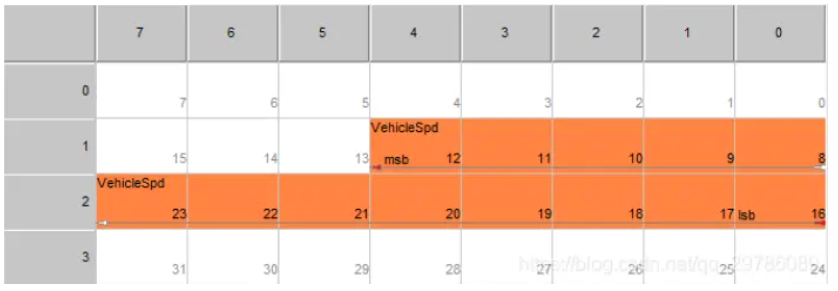
矩阵图
LSB:16(起始位)
MSB:12(终止位)
Size:13(长度)
那么factor为啥是0.056我们先确定了长度是13bit,并在报文中把该信号排布,那么可知:2^13=8192 从0-8191刚好为8192个数字,那么8191转化为十六进制的数是不是1FFF,看看coding值范围0x0000~~0x1FFF 但是设计的时候,车速规定的区间是0-300也及
最小值:0
最大值:300
并且coding规定了从0x0000~~0x14D5才是有效的
14D5转化为十进制数为5333
factor=300/5333=0.05625反应到DBC中如下图:
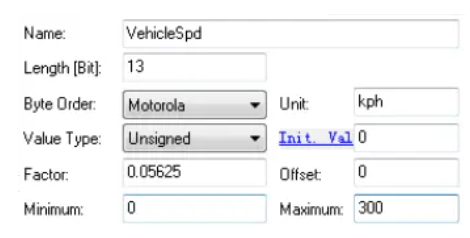
DBC
审核编辑 :李倩
-
CAN总线
+关注
关注
145文章
1926浏览量
130595 -
通信设计
+关注
关注
0文章
25浏览量
10498 -
CANoe
+关注
关注
4文章
64浏览量
8612
原文标题:汽车工程师:教你快速上手CANoe汽车总线通信设计与开发?
文章出处:【微信号:sim_ol,微信公众号:模拟在线】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐


NXP FRDM-MCXC444开发板在RT-Thread环境下的上手过程
【「仓颉编程快速上手」阅读体验】+初步读后感
【「仓颉编程快速上手」阅读体验】+壹读后感
CANoe中Logging模块使用方法及妙招

CANoe新版本18正式发布


openai sora如何使用?Sora 使用指南:快速上手
使用 Taro 开发鸿蒙原生应用 —— 快速上手,鸿蒙应用开发指南
在CanoE和TC3x7应用套件之间建立通信,如何实现通过串行通信从CanoE收到的数据帧?
如何利用IIOSCOPE软件来快速上手AD-FMCOMMS3_EBZ板子?
快速上手Banana Pi BPI-M4 Zero 全志科技H618开源硬件开发开发板

【HPM5300 for RT-Thread】高性能RISC-V平台开发快速上手






 工商网监
工商网监
评论