 超声波定性测距传感器
超声波定性测距传感器

此应用程序的主要目标是使用 Dialog Semiconductor 的SLG47105V设计一种超声波定性距离估计传感器。该系统设计使用高压 (HV) 宏单元和 GreenPAK 内的其他内部和外部组件来与超声波传感器交互。
所应用的方法基于根据脉冲反射时间控制输出信号的持续时间。发射器产生具有必要宽度的超声波脉冲。当该脉冲到达障碍物时,反射波回波返回接收器。然后可以使用脉宽调制 (PWM) 对返回的回波信号进行分类。
这种设计可用于各种应用,例如视障人士的设备、停车辅助系统、机器人和警告系统。
与超声波触发器和接收器的接口
在这个设计的系统中,发射器每 31.25 ms 向超声波接收器发送一个触发脉冲。该信号由 HV 部分放大。GreenPAK 的内部组件与模拟比较器 (ACMP) 和外部组件一起,在双极晶体管上具有最简单的放大级,可放大接收器获得的信号。
HV 部分是增加触发信号幅度所必需的。ACMP 和带有双极晶体管上最简单放大级的外部部件用于放大接收器信号。由于系统每 31.25 毫秒进行一次测量,因此很容易看到传感器测量距离的差异。
超声波距离传感器
发射器和接收器用于 HC-SR04 传感器。
发射器连接到 GreenPAK,它会生成必要的触发信号(约 10-µs 单次,频率为 32 Hz)。接收器捕捉到反射波信号,然后产生PWM输出信号,作为测量距离信息的呈现方式。
框图如图 2 所示。
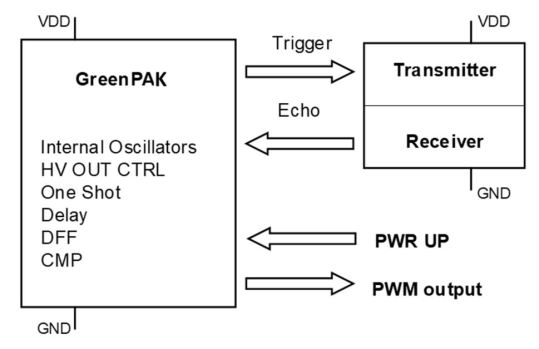
图 2:GreenPAK 框图
使用 one-shot 和 HV OUT CTRL 模块生成输入触发,以放大信号幅度。回波信号由 GreenPAK 的 ACMP 和一些外部元件过滤和放大。然后,使用反相器、延迟和 D 触发器模块创建 PWM 输出信号。PWM“HIGH”对应于到被检测物体的距离。“HIGH”越长,物体越接近。因此,此 PWM 信号可用于不同的通知方法,例如驱动电机、LED 和定量距离估计。
此设计中有四个主要模块:发送器、电荷泵、接收器和 PWM。为了降低电路的功耗,所有模块都连接到“PWR UP”(当 PIN 16 为高电平时)。
对于这些模块,使用了两个具有以下属性的振荡器(图 3 和图 4)。
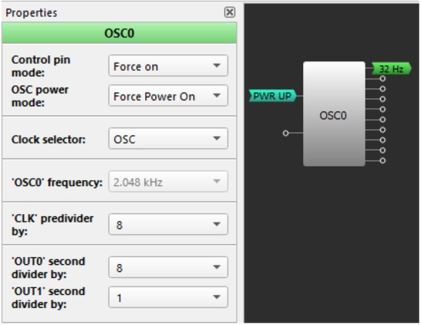
图 3:OSC0 配置
该振荡器产生 2.048 kHz/8/8 (32 Hz) 的频率。
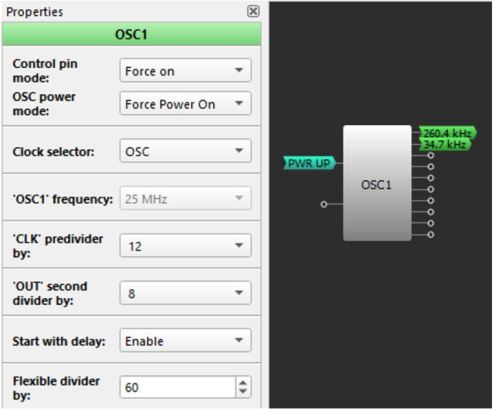
图 4:OSC1 配置
该振荡器产生两个必要的频率:25 MHz/12/8 (~260.4 kHz) 和 25 MHz/12/60 (~34.7 kHz)。
完整的设计文件可在此处获得。它是在免费的基于 GUI 的GreenPAK Designer 软件(Go Configure Software Hub 的一部分)中创建的。
发射机
该模块用于为发射机创建触发信号。电路图如图 5 所示。
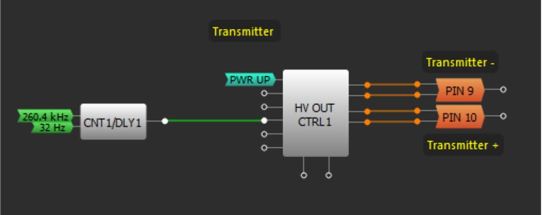
图 5:发送器模块电路图
计数器/延迟 (CNT1/DLY1) 块配置为一次性。该模块使用 260.4 kHz 的时钟来生成频率为 32 Hz 的约 10 µs 脉冲触发信号(图 6)。该信号进入 HV OUT CTRL1 模块,该模块与电荷泵模块一起将幅度放大至 ~9 V。引脚 9 和 10 用作发送器的输出。
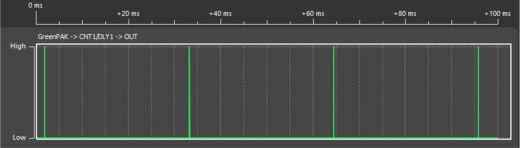
图 6:触发信号
电荷泵
该模块用于放大触发信号幅度。电路图如图 7 所示。
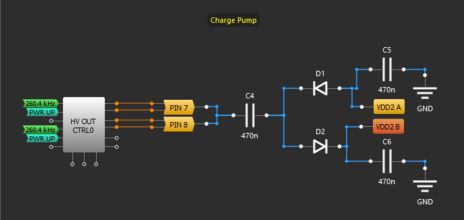
图 7:电荷泵模块电路图
半桥 HV OUT CTRL0 由 5V 直流电压 (POR) 供电。260.4 kHz 振荡器用于产生半波倍压器电路所需的方波信号(交流电压)。最终电压取决于所选二极管 D1 和 D2 的电压降(小于 10 V)。
接收者
该模块用于接收、放大和过滤回波信号。电路图如图 8 所示。
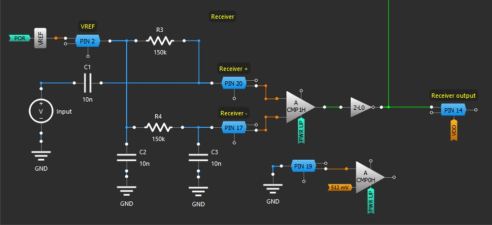
图 8:接收器电路图
在 GreenPAK 之前,回波信号进入双极晶体管上最简单的放大器级,然后将其放大(图 9)。然后回波信号到达 CMP1 块,在此处选择有用信号。这个反相信号是接收器的输出(PIN 14)。接收器信号(PIN 14,GPIO1)仅用于测试。对于最终 PCB,使用 PWM 输出(PIN 15,SCL/GPIO2)。
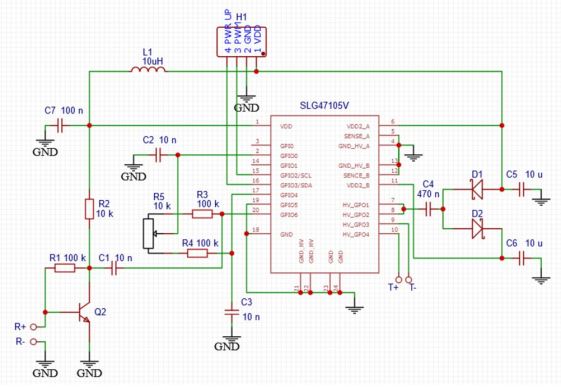
图 9:全电路设计
如图 9 所示,有一个电位器 R5。需要该电位器来调整 CMP1 阈值(几毫伏)以获得传感器的合适灵敏度。
脉宽调制
这个块是创建接收信号感知方式所必需的。此外,还需要进一步的信号处理及其应用(图 10)。
主要思想是创建一个方波信号,从触发信号到回波信号开始,该信号为 HIGH。随着回波信号相位的变化,根据与障碍物的距离,HIGH PWM 的持续时间也会发生变化。
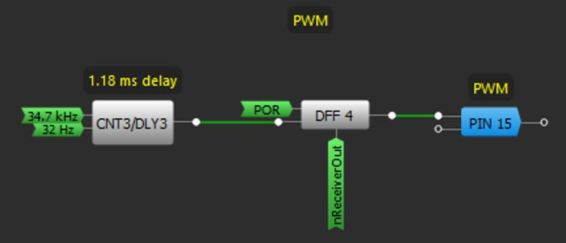
图 10:PWM 电路设计
在电路测试期间,接收器从 0 到 ~20 cm 捕获来自发射器的寄生信号。为了跳过这个无用的信号,添加了延迟 CNT3/DLY3 模块的配置。典型的延迟时间约为 1.18 ms。
印刷电路板设计
这是该应用的建议 PCB 设计(图 11 和 12),它基于图 9 中的原理图。此外,还有工作原型的照片(图 13 和 14)。
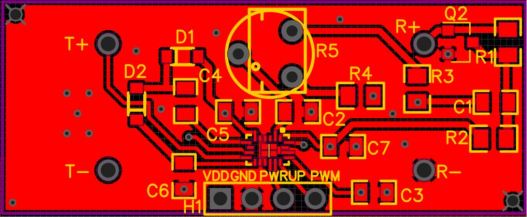
图 11:顶部
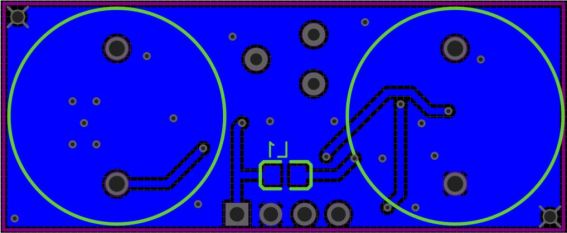
图 12:底部
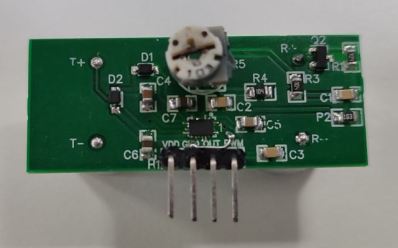
图 13:顶面照片

图 14:底部照片
测试
为了测试设计,电路连接到 5 V (VDD) 并且 PWR UP 设置为高电平。
测量距离结果示例如下:图 15 中的 100 厘米,图 16 中的 200 厘米,图 17 中的 300 厘米,图 18 中的 400 厘米。示波器屏幕截图显示了发射器信号(PIN 9, HV_GPO2_HD)、接收器信号 (PIN 14, GPIO1) 和 PWM (PIN 15, SCL/GPIO2)。
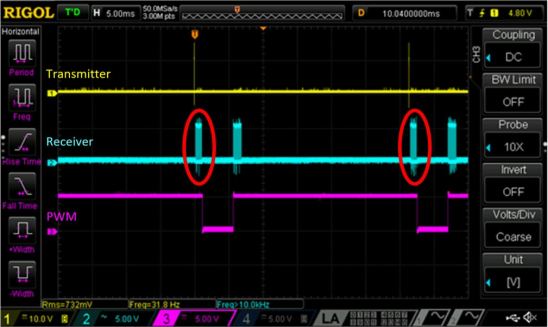
图 15:电路测试测量距离在约 100 cm 范围内

图 16:电路测试测量距离在约 200 cm 范围内

图 17:电路测试测量距离在约 300 cm 范围内

图 18:电路测试测量距离在约 400 cm 范围内
从这些图中可以看出,接收器从 0 到 ~20 cm 捕获来自发射器的寄生信号(这些毛刺以红色圈出)。
结果证明该电路按预期工作,GreenPAK模块能够作为超声波定性测距传感器的控制模块。它测量的距离从 20 厘米到大约 400 厘米。
结论
本文介绍了如何将 HVPAK SLG47105 配置为控制单元,以驱动换能器并使用 PWM 解释接收器的回波脉冲输出,以创建超声波定性距离估计传感器。所描述的超声波传感器测量从 20 厘米到大约 400 厘米的距离。GreenPAK 的内部资源(包括 HV、振荡器、逻辑和 GPIO)易于配置,以实现该设计所需的功能。
审核编辑:郭婷
-
传感器
+关注
关注
2578文章
55771浏览量
795102 -
超声波
+关注
关注
63文章
3334浏览量
146307 -
触发器
+关注
关注
14文章
2065浏览量
63617
发布评论请先 登录
超声波压力传感器:精准感知,开启智能监测新时代

哪些因素影响超声波传感器检测范围与精度
ICU-10201:高性能超声波飞行时间测距传感器的深度解析
TDK ICU - 20201长距离超声波飞行时间测距传感器深度解析
ICU-30201:超远距离超声波飞行时间测距传感器的卓越之选

超声波传感器线圈:自动驾驶实现精确实时近距离感知的关键
新能源汽车自动泊车超声波传感器铝电解电容供电稳定

无线超声波测距传感器:精准感知,开启智能测距新时代
超声波测距换能器:工业与生活中的测量利器
超声波测距换能器:工业与生活中的测量利器
超声波水下测距换能器:探索水下世界的“千里眼”
非接触式超声波流量传感器在涂布流体管理中的应用
超声波清洗的原理是什么?超声波清洗是如何起作用的?




评论