 猫头鹰mini单机系统基于Visbot视觉模块的软硬件
猫头鹰mini单机系统基于Visbot视觉模块的软硬件
蜂群软件架构
软件架构包括单机系统和算法软件,多机协同软件,多机通讯机制。猫头鹰mini单机系统基于Visbot视觉模块的软硬件,Visbot模块负责提供飞行前进方向的深度图,同时基于Vins-fusion的双目定位算法提供飞机的姿态定位信息。
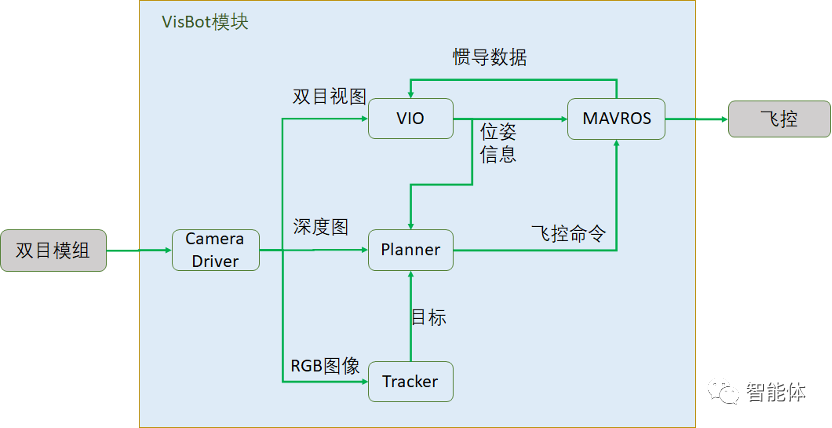
图:Visbot视觉模块软硬件架构图
如果是单机系统,类似于ego-planner的避障导航软件就可以指导飞机完成避障环境下的轨迹规划,结合我们提供的控制软件就可以进行目标飞行。但是如果在多机协同环境,还需要协调多机轨迹、位置、同步完成多机目标飞行。我们适配了ego-planner-swarm开源软件,作为多机协同下的避障导航软件。它结合了多机的位置,和各自目标下的轨迹,整体规划出防碰撞轨迹。再结合我们提供的控制软件就可以同步控制集群进行目标飞行。
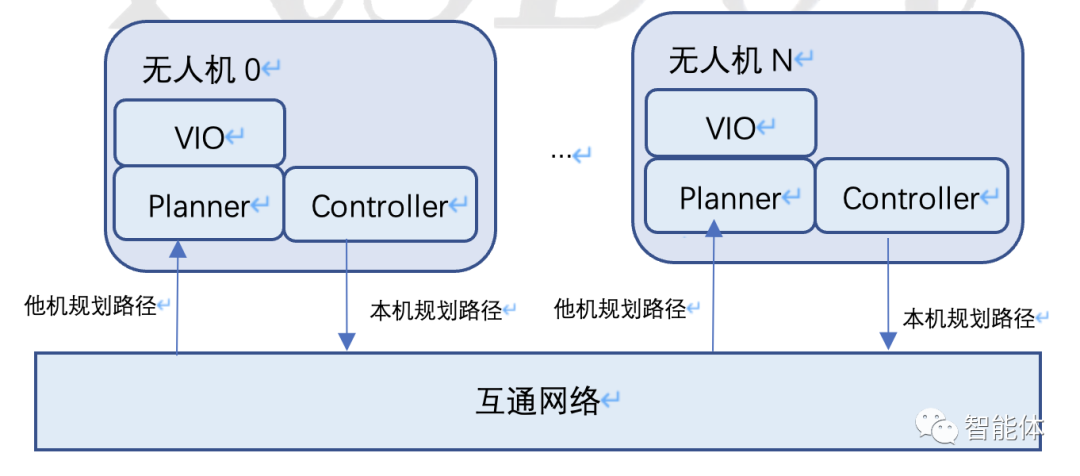
图:多机协同架构
在分布式多机协同系统中,需要互通网络环境和多机通讯机制。目前引用的ego-planner-swarm软件是基于ROS系统的多机通讯机制,是Master/Slave架构的消息通讯机制。我们Visbot视觉模块提供了Wifi接口,它可以接入大功率Wifi基站,优势是可以较长距离通讯;也可以配置成自组网模式(ROS Master配置成WifiAP), 省去Wifi基站,可以满足小范围的机群需求。
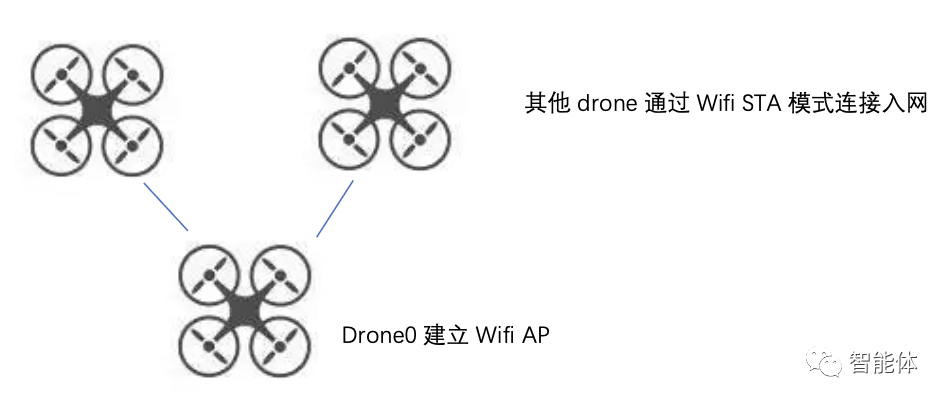
图:纯无人机Wifi组网
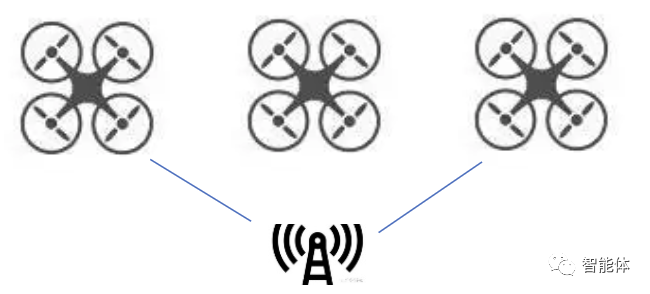
图:基于Wifi基站无人机组网
关于北京威斯博
北京威斯博科技有限公司(简称“VisBot”)2022年创立,公司致力于视觉机器人领域的研究和产品开发。2022年1月和5月,先后推出了猫头鹰和猫头鹰mini两款AI视觉无人机,主要为人工智能和机器人等方向教育和科研领域提供产品支持。产品的核心是Visbot视觉系统,集软/硬件于一身,可处理多类型数据,运行多种智能算法。其中包括双目,定位和避障算法的优化。Visbot视觉系统是基于先进的嵌入式人工智能技术,自主研发和拥有自主知识产权的软/硬件系统,可AI使能无人机,机器人等设备。视觉智能化是机器人的必然发展方向,公司致力于更智能、更高效、全自主的科研技术融入机器人世界,改变人类生活。
审核编辑 :李倩
-
无人机
+关注
关注
230文章
10457浏览量
180936 -
视觉模块
+关注
关注
0文章
3浏览量
5011
原文标题:一款不需要GPS的无人机——猫头鹰mini
文章出处:【微信号:xiaojiaoyafpga,微信公众号:电子森林】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
研华产品通过统信及兆芯通用软硬件适配互认测试
英特尔软硬件构建模块如何帮助优化RAG应用

嵌入式系统软硬件基础知识大全
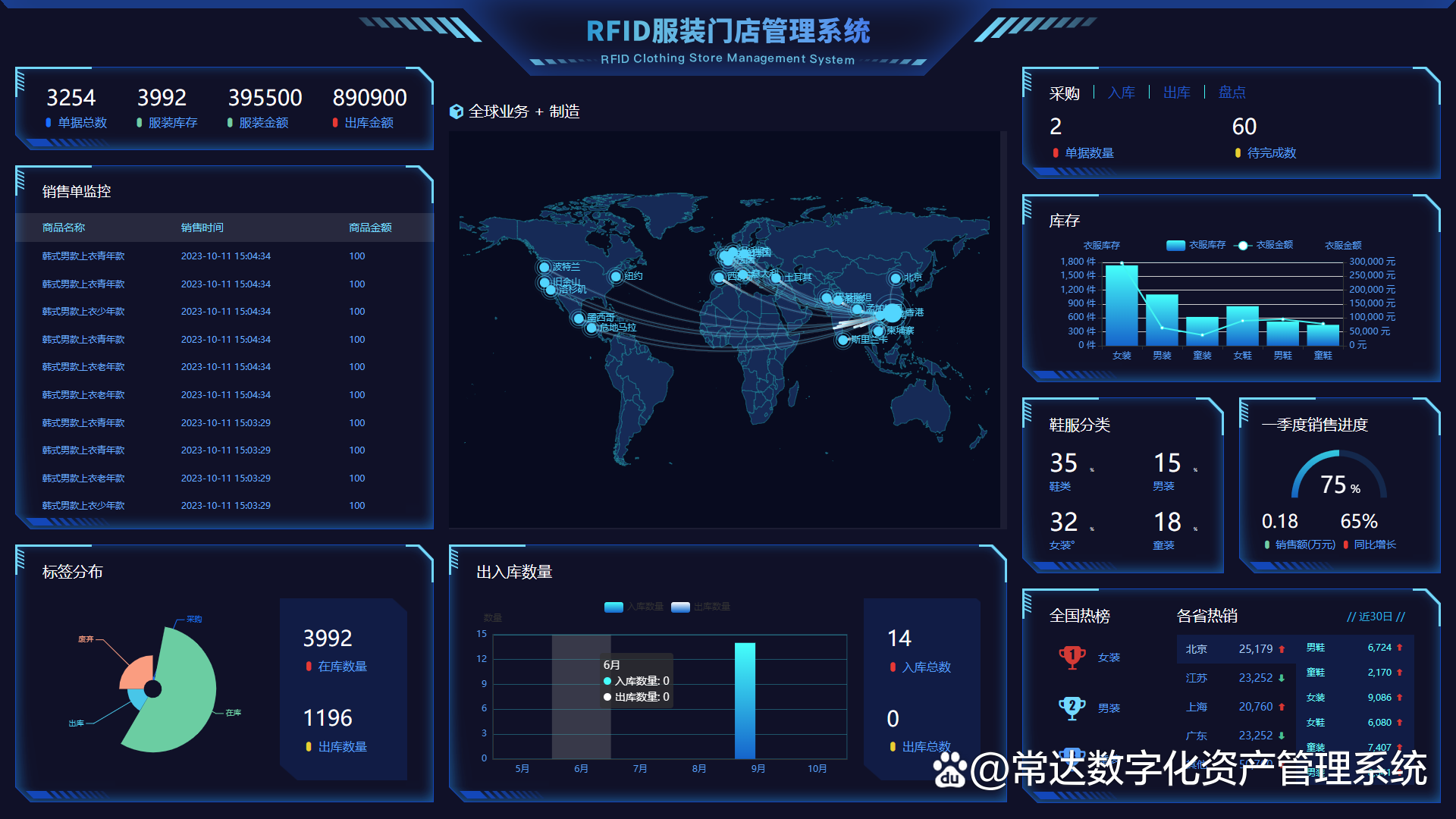
解析数字化资产管理系统:RFID技术的软硬件集成与标签分类应用


小门卫是一家人工智能、人脸识别、人证核验的软硬件生产厂家。 小门卫产品涉及人脸识别酒精检测一体机、人证核验访客

KubeCASH:基于软硬件融合的容器管理平台





 工商网监
工商网监
评论