 气伺服焊钳为什么会发出钳E1超出软件限制报警
气伺服焊钳为什么会发出钳E1超出软件限制报警
大家在调试气伺服焊钳时,可能经常遇到这个故障"Zange E1 ausserhalb Softwaregrenze",钳E1超出软件限制.
下面我们看一它是如何发出的这个报警的.
在VW_USR_S中的SyncMoveMessage里编写报警/故障信息:
SyncMoveMessage(msg_nr :IN, MsgTyp :IN, SZNr :IN):
…. …. ..
CASE 9
USER_MSG.MSG_TXT[]="Zange E1 ausserhalb Softwaregrenze"
报警:钳E1超出软件限制
寻找调用程序SyncMoveMessage())的地方
在OUTOFSOFTEND程序中:
OUTOFSOFTEND(SZ_Zielpos:IN, SZ_num:IN)
-----判断超程-----
IF(SZ_Zielpos < $softn_end[SZ_num]) OR (SZ_Zielpos > $softp_end[SZ_num])THEN
SZ_Zielpos焊钳的实际位置小于最小开口值,或者大于最大开口。
IF(SZ_num==7) AND NOT $OUT[O_SZ1_FRG] AND NOT $OUT[O_NZ1_FRG] AND NOT$OUT[O_CZ1_FRG] THEN
-钳号1=7-没有A715允许焊钳动作-没有A1195铆钳激活-没有A1355压钳激活-
SyncMoveMessage(9, #QuitMsg) 发出报警信息钳E1超出软件限制
ENDIF
检查实际位置是否在SW限位开关内
zielpos.E1=IstPosCalc(SZNr)焊钳位置计算
而变量SZ_Zielpos 焊钳的实际位置是由程序IstPosCalc()计算出来的:
DEFFCTREAL IstPosCalc(SZNr:IN)焊钳位置计算
INT SZNr
REAL FctIstPos
SWITCH SZNr
CASE 1
FctIstPos=sig1_istpos sig1_istpos$IN[737] TO $IN[751] 转换焊钳位置
MyZiel=sig1_istpos
FctIstPos=FctIstPos / 10
IF $IN[I_SZ1_Vorz] THEN E752位置设定符号(0=正/1负)
FctIstPos=FctIstPos *(-1)位置方向变换
ENDIF
.. .. ... ..
RETURN(FctIstPos)焊钳位置发出
ENDFCT
-
软件
+关注
关注
69文章
4943浏览量
87487 -
伺服
+关注
关注
16文章
651浏览量
40963 -
程序
+关注
关注
117文章
3787浏览量
81043
原文标题:通过机器人报警提示:焊钳报焊钳超程故障.分析其程序原理
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
激光切割机Z轴伺服报警怎么解决
TPD1E1B04具有低RDYN和低钳位电压的单通道ESD保护二极管数据表

伺服驱动器报警原因和处理方法及怎么复位和预防措施
伺服驱动器一上电就报过载解决方法及具体案例
伺服驱动器报警原因及处理方法
伺服驱动器报警怎么复位
松下伺服报警34需要调整哪些参数
伺服过载报警调什么参数好
ADUM240E1与E0是否能直接换用?
具有精度可调节的电流限制和过压钳位的5V电子熔丝TPS25200-Q1数据表
伺服电机的精确定位方法
典型的E1接口连接器和实现
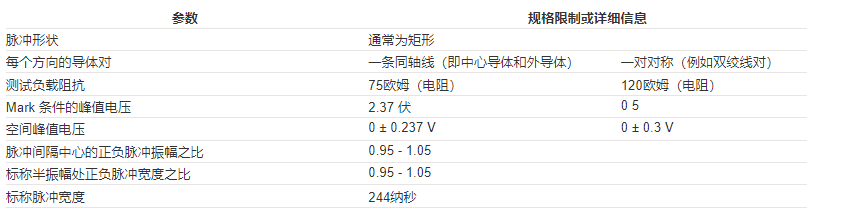
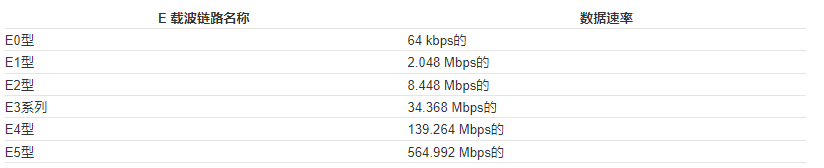
E载波系统中最常用的电路之E1链路
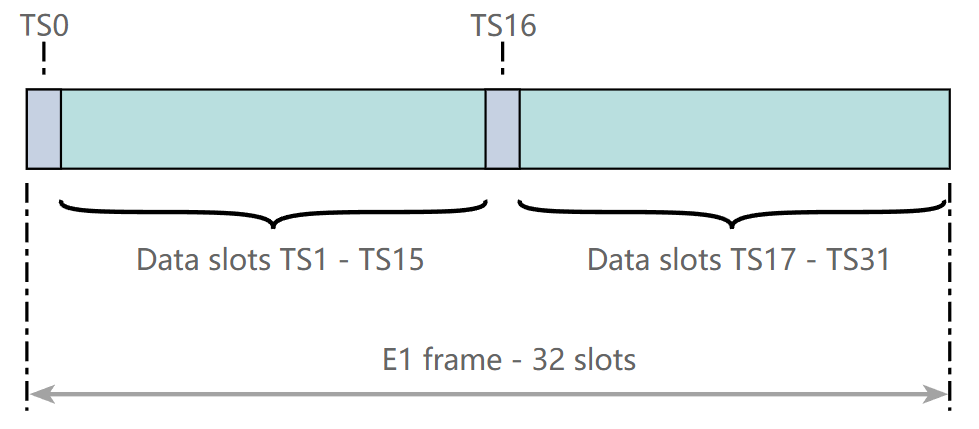
E型载波系统基础知识





 工商网监
工商网监
评论