 高精度等间距二维三维PSO输出教程
高精度等间距二维三维PSO输出教程
上节课程我们讲述了多种PSO模式原理和使用方法,本节课程我们主要讲解一下如何使用PSO功能实现高精度等间距输出。
 ZMC460N双总线控制器
ZMC460N双总线控制器
一、硬件说明
硬件选型的首要要求是支持PSO功能,再分析PSO的应用场合和轴数等选择具体的型号。本例以ZMC460N双总线运动控制器为例展开介绍。
PSO功能用于控制激光或点胶阀的高速开/关,直线插补和平面圆弧插补功能用于完成加工轨迹,连续插补功能用于让多段插补的速度连续,提高加工的效率。
ZMC460N双总线控制器
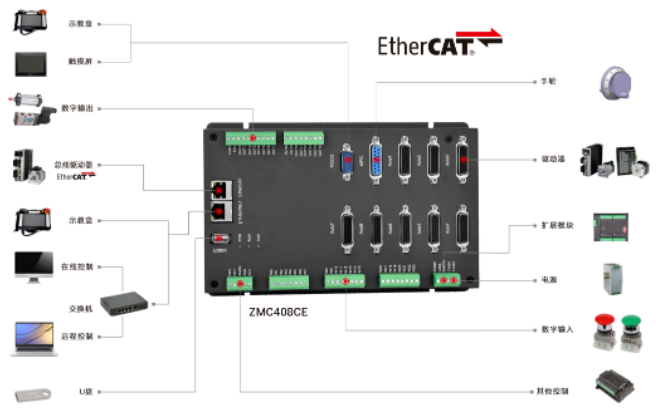
ZMC460N双总线控制器是正运动技术推出的新一代网络60轴运动控制器(支持EtherCAT总线轴+RTEX总线轴+脉冲轴混合使用),自带六个脉冲轴接口(包含差分脉冲输出和差分编码器输入),通用输出口支持配置为单端脉冲输出,通用输入口支持配置成单端编码器输入。脉冲输出频率最大可达10MHZ,EtherCAT总线的通讯周期最快可达250微秒。
支持12路PSO输出,输出口独立,支持12路同时输出,每个系统周期可比较输出多次,应用场景更为丰富。
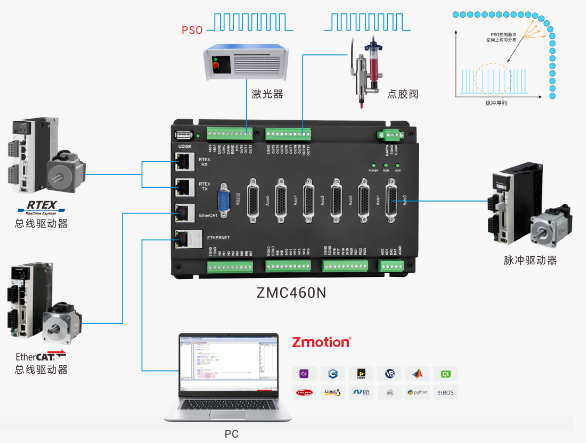 ZMC460N双总线控制器架构图
ZMC460N双总线控制器架构图
PSO功能主要通过“HW_PSWITCH2”硬件位置比较输出指令和“HW_TIMER”硬件定时指令实现,下面来讲解一下这两个指令的详细用法。
二、指令说明
1.HW_PSWITCH2
案例将会用到HW_PSWITCH2以下几个模式,指令语法说明如下:
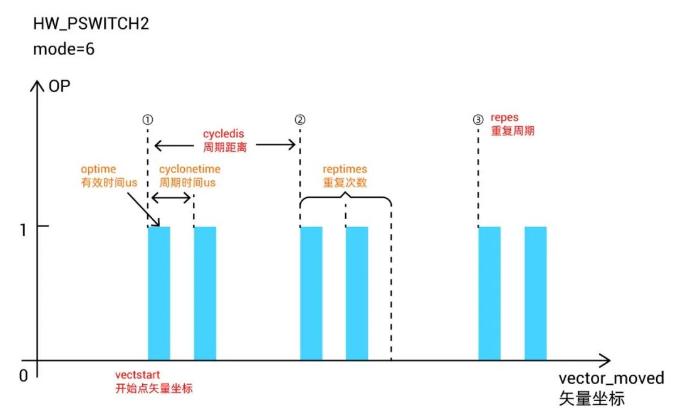
(1)Mode=6:矢量比较方式,周期模式,与HW_TIMER一起使用
HW_PSWITCH2(6,opnum,opstate,vectstart,repes,cycledis)
mode:6-启动比较器
opnum:对应的输出口
opstate:第一个比较点的输出状态
vectstart:比较点VECTOR_MOVED当前运动距离
repes:重复周期,一个周期只比较一次
cycledis:周期距离,每隔这个距离输出一次
⊙ 说明: 此模式无需TABLE,坐标均参考矢量坐标,从vectstart的位置开始比较,每隔cycledis距离触发一次比较,重复比较的周期为repes,每次触发比较信号后,保持信号的脉冲宽度由HW_TIMER指令设置。
HW_TIMER可以控制到达一个触发点控制OP反转多次,HW_TIMER周期走完等待下一周期的触发。
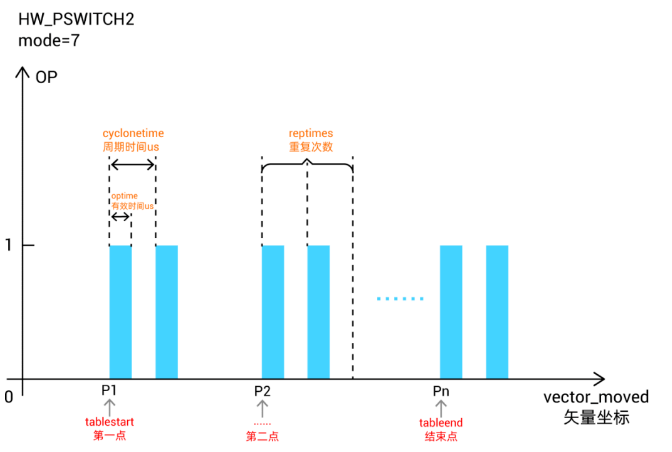
(2)Mode=7:矢量比较方式,采用TABLE,与HW_TIMER一起使用
HW_PSWITCH2(7,opnum,opstate,tablestart,tableend [,optimeus,optimes,cyctimeus])
mode:7-启动比较器,opstate不翻转,方便与HW_TIMER配合使用
opnum:对应的输出口
opstate:第一个比较点的输出状态
tablestart:第一个比较点VECTOR_MOVED坐标所在TABLE编号
tableend:最后一 个比较点VECTOR_MOVED坐标所在TABLE编号
[以下参数和HW_TIMER二选一,HW_TIMER单独写可以动态调整参数]
optimeus:动态调整HW_TIMER的有效时间
optimes:动态调整HW_TIMER的触发脉冲数,0-不输出
cyctimeus:动态调整HW_TIMER的脉冲周期时间
⊙ 说明: 比较点写在TABLE中,坐标均参考矢量坐标,每到达一个TABLE比较矢量位置触发OP,此时OP的脉冲宽度和每次触发的比较次数由HW_TIMER控制;到达下一个TABLE位置,OP再次触发。
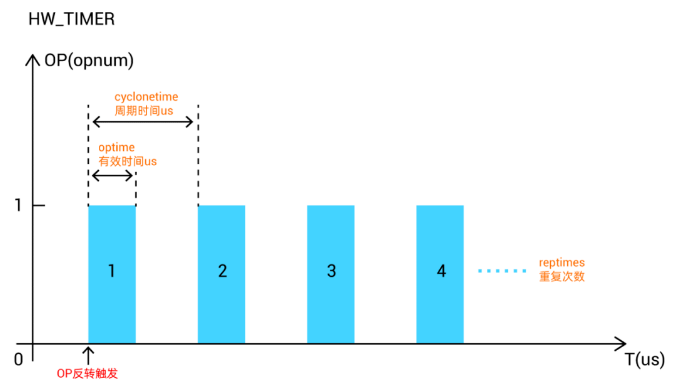
2.HW_TIMER
硬件定时器,用于硬件比较输出后一段时间后还原电平。HW_TIMER只有1个,每次调用会强制停止之前的调用。
不使用或比较完成时使用HW_TIMER(0)关闭。
HW_TIMER(mode,cyclonetime,optime,reptimes,opstate,opnum )
mode:0停止,2-启动
cyclonetime:周期时间,us单位
optime:有效时间,us单位
reptimes:重复次数,启动模式,reptimes =0时,软关闭HW_TIMER,原来的脉冲没有完成的,会继续输出完成
opstate:输出缺省状态,输出口变为非此状态后开始计时
opnum:输出口编号,必须能硬件比较输出的口
⊙ 说明: 参数设置可参考下方示意图,此指令的效果是固定时间周期输出,设置每个周期的有效输出的时间和重复输出的次数。
⊙使用HW_TIMER硬件定时无法仿真,只能在控制器平台运行。
三、二维等间距PSO输出
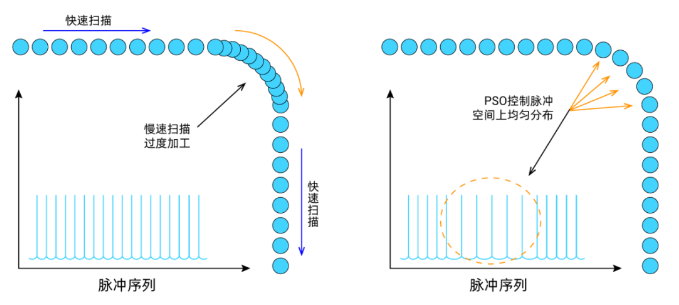
等距比较输出模式,不管运动速度和运动轨迹如何变化,始终固定距离输出脉冲,使得输出在空间上分布是均匀的,示意图如下。
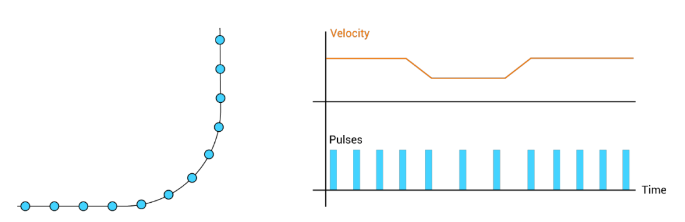
上节描述的模式中,有几种模式都能实现XY平面的等距输出,例如现有一段上左图所示的轨迹,采用直线+圆弧+直线组成,每间隔10个距离比较输出一次,一共比较12次,等间距输出的方法参见下方例程的说明。
例程:采用mode=6,矢量比较模式,结合HW_TIMER硬件定时,采用两轴的合成矢量位置作为比较的参考坐标位置,实现上方示意图的效果,使用方便,无需计算位置坐标,精度高。
RAPIDSTOP(2)
WAIT IDLE(0)
WAIT IDLE(1)
'基础轴参数设置
BASE(0,1) '选择XY轴
'ATYPE=4,4 '1-脉冲轴类型,比较DPOS;4-带编码器反馈轴类型,比较编码器的反馈位置MPOS
UNITS=100,100
SPEED=100,100
ACCEL=1000,1000
DECEL=1000,1000
MERGE=ON,ON
SRAMP=50,50 's曲线速度平滑
OP(0,OFF)
'将当前位置设置为0,0
DPOS=0,0
MPOS=0,0
DIM WidthTime,Interval,StartPos,EndPos
WidthTime = 20000 '脉冲宽度20000us
Interval = 10 '脉冲间隔
StartPos = 10 '触发起始位置
EndPos = 130 '结束位置
FORCE_SPEED=60 'SP速度
MOVEABS(0) '运动到0位
WAIT IDLE
VECTOR_MOVED = 0 '插补矢量距离清0
DIM iTime
iTime =ABS(EndPos - StartPos) \ Interval '计算比较次数
TRACE StartPos,iTime,Interval,WidthTime
HW_PSWITCH2(2) '清空HW比较缓冲区
HW_PSWITCH2(6,0,ON,StartPos,iTime,Interval) '从StrartPos触发比较间隔Interval比较iTime次
HW_TIMER(2,WidthTime+100,WidthTime,1,OFF,0) '输出触发变成ON后,打开WidthTime us后关闭输出
DELAY(10)
TRIGGER '启动示波器
MOVEABS(50,0) '开始运动
MOVECIRCABSSP(75,25,50,25,0)
MOVEABS(75,75)
WAIT IDLE '等待运动停止
HW_PSWITCH2(2) '清空HW比较缓冲区
END
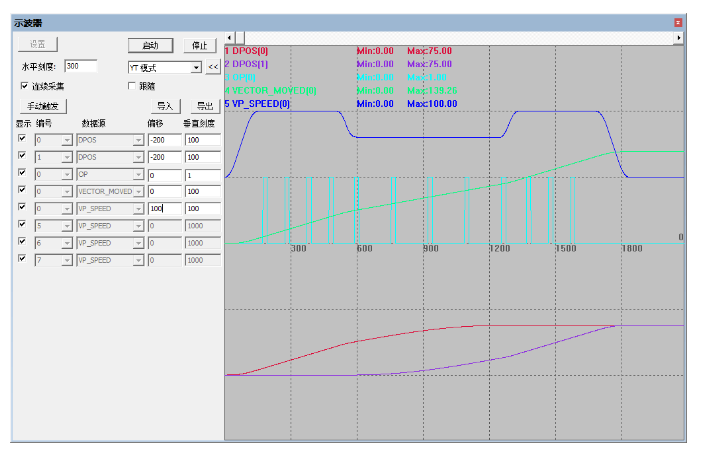
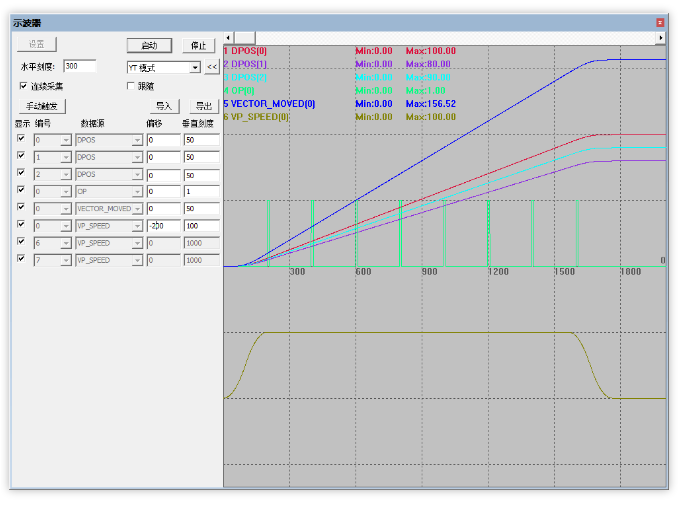
示波器采样波形如下:采样5个通道的波形,依次为轴0的目标位置,轴1的目标位置,输出口0,轴0和轴1插补的矢量合成位置,轴0和轴1插补的运行速度。
每间隔10个单位距离比较一次,一共比较12次,由HW_TIMER可精准控制输出脉冲的宽度,输出频率更快,整体精度更高。
XYZ模式下的比较输出波形:
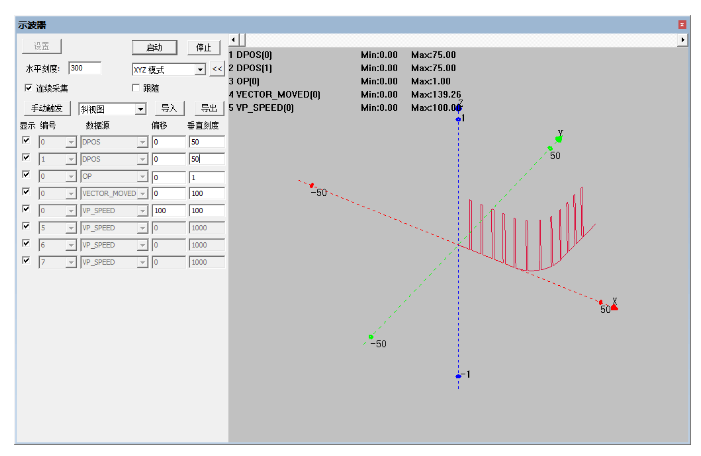
综上所述,等距比较场合,使用模式6较为方便,只需要得出比较的距离和OP输出的时间即可,模式6可用于单轴和多轴插补场合的比较。模式5和模式7也能实现上述功能。
四、三维等间距PSO输出
1.三维等间距PSO输出示例
例程: 采用模式7,模式6是按指令设置的触发距离周期输出,模式7的输出位置由TABLE的数据点控制,输出位置更灵活,可实现上例等距输出,也可实现灵活间隔的输出。
RAPIDSTOP(2)
WAIT IDLE(0)
WAIT IDLE(1)
WAIT IDLE(2)
'基础轴参数设置
BASE(0,1,2) '选择XY轴
'ATYPE=4,4,4 '1-脉冲轴类型,比较DPOS;4-带编码器反馈轴类型,比较编码器的反馈位置MPOS
UNITS=100,100,100
SPEED=100,100,100
ACCEL=1000,1000,1000
DECEL=1000,1000,1000
MERGE=ON,ON
SRAMP=50,50,50 's曲线速度平滑
OP(0,OFF)
'将当前位置设置为0,0
DPOS=0,0,0
MPOS=0,0,0
FORCE_SPEED=60 'SP速度
MOVEABS(0,0,0) '运动到0位
WAIT IDLE
VECTOR_MOVED = 0 '插补矢量距离清0
DIM WidthTime,T_Startnum,Pointnum
WidthTime = 10000 '脉冲宽度10000us
T_Startnum = 0 '比较点起始table编号
Pointnum = 8 '比较点个数
TABLE(T_Startnum,10,30,50,70,90,110,130,150) '比较点坐标设置,起始table位置T_Startnum,8个点
HW_PSWITCH2(2) '清空HW比较缓冲区
HW_PSWITCH2(7,0,ON,T_Startnum,T_Startnum+Pointnum-1) '模式7
HW_TIMER(2,WidthTime+100,WidthTime,1,OFF,0) '输出触发变成ON后,打开WidthTime us后关闭输出
DELAY(10)
TRIGGER '启动示波器
MOVEABS(100,80,90) '三轴直线插补
WAIT IDLE '等待运动停止
HW_PSWITCH2(2) '清空HW比较缓冲区
END
波器采样波形如下:采样6个通道的波形,依次为轴0的目标位置,轴1的目标位置,轴2的目标位置,输出口0,轴0轴1轴2插补的矢量合成位置,轴0轴1轴2插补的运行速度。
Table存储的比较点矢量位置为10,30,50,70,90,110,130,150,共8个点,每到一个点触发比较,由HW_TIMER可精准控制输出脉冲的宽度,输出频率更快,整体精度更高。
审核编辑 黄昊宇
-
运动控制器
+关注
关注
2文章
418浏览量
24904 -
PSO
+关注
关注
0文章
49浏览量
13018
发布评论请先 登录
相关推荐
二维和三维Gauss随机粗糙面的Monte Carlo仿真
高精度三维运动平台可以应用到哪些场合?
三维触控技术突破“二向箔”的束缚
三维快速建模技术与三维扫描建模的应用
广西扫描服务三维检测三维扫描仪
安徽三维动画制作和二维动画有哪些区别呢?(一)
安徽三维动画制作和二维动画有哪些区别呢?(三)
CAD制图中如何将三维模型转二维图形

一维、二维、三维电机的性能分析

一维卷积、二维卷积、三维卷积具体应用

升级!昊衡科技应变场重构软件从二维扩展到三维

二维/三维的多轴PSO视觉飞拍与精准输出:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(八)






 工商网监
工商网监
评论