 惯性导航技术的发展历程
惯性导航技术的发展历程
导读:惯性导航系统(INS,Inertial Navigation System)是一种利用惯性敏感器件、基准方向及最初的位置信息来确定运载体在惯性空间中的位置、方向和速度的自主式导航系统,也简称为惯导。
惯性导航技术的发展历程
第一代惯性导航技术指 1930 年以前的惯性技术,奠定了整个惯性导航发展的基础。牛顿三大定律成为惯性导航的理论。第二代惯性技术开始于上世纪 40 年代火箭发展的初期,其研究内容从惯性仪表技术发展扩大到惯性导航系统的应用。70 年代初期,第三代惯性技术发展阶段出现了一些新型陀螺、加速度计和相应的惯性导航系统,其研究目标是进一步提高INS 的性能,并通过多种技术途径来推广和应用惯性技术。当前,惯性技术正处于第四代发展阶段,其目标是实现高精度、高可靠性、低成本、小型化、数字化、应用领域更加广泛的导航系统。比如随着量子传感技术的迅速发展,在惯性导航技术中,利用原子磁共振特性构造的微小型核磁共振陀螺惯性测量装置具有高精度、小体积、纯固态、对加速度不敏感等优势,成为新一代陀螺仪的研究热点方向之一。
惯性导航的组成
惯性导航包括惯性测量单元(Inertial Measurement Unit,简称IMU)和计算单元两大部分。通过IMU感知物体方向、姿态等变化信息,再经过各种转换、补偿计算得到更准确的信息。比如检测物体的初始位置、初始朝向、初始姿态以及接下来每一刻朝向、角度的改变,然后把这些信息加一起不停地推,推算出物体现在的朝向和位置。
IMU主要由加速度计和陀螺仪组成,可实时检测物体的重心方向、俯仰角、偏航角等信息,如果还加上电子罗盘和气压计等传感器,那IMU的测量信息量与精度也相应地能得到一定的提高。而计算单元则主要由姿态解算单元,积分单元和误差补偿单元这三部分组成。
惯性导航的工作原理
惯性导航的目的是实现自主式导航,即不依赖外界信息,包括卫星信号、北极指引等。那么惯性是如何实现的呢?惯性导航工作的核心原理是:它从过去自身的运动轨迹推算出自己目前的方位。其工作技术原理不外乎就是以下三条基本公式:距离=速度×时间,速度=加速度×时间,角度=角速度×时间。首先,检测(或设定好)初始信息,包括初始位置、初始朝向、初始姿态等。然后,用IMU时刻检测物体运动的变化信息。其中,加速度计测量加速度,利用原理 a=F/M,测量物体的线加速度,然后乘以时间得到速度,再乘以时间就得到位移,从而确定物体的位置;而陀螺仪则测量物体的角速率,以物体的初始方位作为初始条件,对角速率进行积分,进而时刻得到物体当前方向;还有电子罗盘,能在水平位置确认物体朝向。这3个传感器可相互校正,得到较为准确的姿态参数。最后,通过计算单元实现姿态解、加速度积分、位置计算以及误差补偿,最终得到准确的导航信息。另外重点讲讲惯性导航是如何通过坐标系模型实现定位的?日常生活中,我们都通过坐标来定位,二维定位是x轴和y轴,三维定位则加上z轴。通过x轴、y轴和z轴的坐标系模型,传感器能够测量各轴方向的线性运动,以及围绕各轴的旋转运动。但在实际应用惯性导航中,惯性测量器件是直接安装在运动载体上的,因此惯性器件测得的角速度和加速度的数值都是在载体运动坐标系下的量,即传感器得到的是以物体的固连坐标系为参照的数据(也叫地理坐标系),但我们日常定位用的是地球坐标系,因此如何把测得的固连坐标系数据转换成地球坐标系数据,是惯性导航重要的第一步。此时,需要引入一个第三者才能实现坐标系转换,即相对静止的惯性坐标系——地心惯性系。地心惯性系:以地球的地心为原点,以地心指向春分点和秋分点的连线为X轴、Y轴,以地球自转轴指向北极为Z轴组成的右手坐标系。因为春分点和秋分点不是地球表面上和地球固定的两个点,而是地球所属宇宙空间中两个固定的点(因为赤道面和黄道面是固定的面)。所以,春分点和秋分点不会因为地球的自转而移动,故地心惯性系是相对静止的,不会随地球自转而移动。
地球坐标系:同样以地球的地心为原点,x 轴穿过本初子午线(0度经线)和赤道的交点,z 轴沿着自转轴指向北极点,xyz 轴成右手系。明显,x 轴是随地球自转而移动,故地球坐标系是相对运动的,会随地球自转而移动。
地理坐标系:以运载体(如下图的P)的中心为坐标原点,x 轴指向正东方向,y 轴指向正北方向,z 轴垂直指向天上。地理坐标系会随运载体的移动而移动。
当运载体运行到地球的 P 点位置时,对应的地球坐标是什么呢?地理坐标系需要怎样旋转才能和地球坐标系重合呢?即两者如何实现变换?其实就是通过一系列复杂的数字运算,简单而言,便是通过对应的旋转矩阵实现两个坐标系之间的旋转变换。
惯性导航系统主要的优点
1、完全依靠运动载体自主地完成导航任务,不依赖于任何外部输入信息,也不向外输出信息的自主式系统,所以具备极高的抗干扰性和隐蔽性;2、不受气象条件限制,可全天候、全天时、全地理的工作。惯导系统不需要特定的时间或者地理因素,随时随地都可以运行;3、提供的参数多,比如GPS卫星导航,只能给出位置,方向,速度信息,但是惯导同时还能提供姿态和航向信息;4、导航信息更新速率高,短期精度和稳定性好。目前常见的GPS更新速率为每秒1次,但是惯导可以达到每秒几百次更新甚至更高。
惯性导航系统主要的缺点
1、导航误差随时间发散,由于导航信息经过积分运算产生,定位误差会随时间推移而增大,长期积累会导致精度差;2、每次使用之前需较长的初始对准时间。惯性导航需要初始对准,且对准复杂、对准时间较长;3、不能给出时间信息;4、精准的惯导系统价格昂贵,通常造价在几十到几百万之间。
惯性导航的分类
从结构上分,惯导可分两大类:平台式惯导系统和捷联式惯导系统。平台式惯性导航系统有实体的物理平台,陀螺和加速度计置于由陀螺定的平台上,该平台跟踪导航坐标系,以实现速度和位置解算,姿态数据直接取自于平台的环架。由于平台式惯导系统框架能隔离运动载体的角振动,仪表工作条件较好,原始测量值采集精确,并且平台能直接建立导航坐标系,计算量小,容易补偿和修正仪表的输出,但是其结构比较复杂,体积大,成本高且可靠性差。捷联式惯性导航系统没有实体的物理平台,把陀螺和加速度计直接固定安装在运动载体上,实质上是通过陀螺仪计算出一个虚拟的惯性平台,然后把加速度计测量结果旋转到这个虚拟平台上,再解算导航参数。捷联式惯性导航系统结构简单、体积小、维护方便,但陀螺仪和加速度计工作条件不佳,采集到的元器件原始测量值精度低。同时,捷联惯导的加速度计输出的是载体坐标系的加速度分量,需要经计算机转换成导航坐标系的加速度分量,计算量较大,且容易产生导航解算的校正、起始及排列转换的额外误差。总体来说,捷联惯导精度较平台惯导低,但可靠性好、更易实现、成本低,是目前民用惯导的主流技术。
惯性导航主要的应用
惯性导航产业最早起步于军用,如航天、航空、制导武器、舰船、战机等领域,随着电子技术的发展和商业价值的挖掘,惯性导航技术的应用扩展到车辆导航、轨道交通、隧道、消防定位、室内定位等民用领域,甚至在无人机、自动驾驶、便携式定位终端(如智能手机、儿童/老人定位追踪器等)中也被广泛应用。
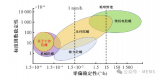
惯导系统为运动载体提供位置、速度、姿态(航向角、俯仰角、横滚角)等信息,不同应用领域对惯性元器件性能和惯导精度的要求各不相同。从精度方面来看,航空航天、轨道交通领域对即时定位精度要求高,且要求连续工作时间长;从系统寿命来看,卫星、空间站等航天器要求最高,因其发射升空后不可更换或维修;涉及到军事应用等领域,对可靠性要求较高;对于民用领域,如车辆导航、室内定位、无人机、自动驾驶等应用,对惯导系统的性价比要求高。总体来说,由于惯导系统的误差累积性和对初始校准的前提要求,一般不能单独使用,只能作为其他主定位导航技术(如GNSS定位、UWB定位、WLAN定位、地磁定位等)的辅助,比如车辆在GPS导航过程中,在失去GPS信号的情况下能够利用自带的加速度和陀螺仪进行惯性导航。因此需要结合具体行业应用需求,有针对性的对惯导元器件和导航算法进行选型。
-
传感器
+关注
关注
2552文章
51383浏览量
756122 -
导航技术
+关注
关注
0文章
34浏览量
9618 -
GPS卫星
+关注
关注
0文章
9浏览量
9339
原文标题:全面解读惯性导航系统与技术,看懂只需这一篇!
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
蓝牙技术的发展历程和工作原理
浅谈惯性导航产品的对齐安装角度
LP-SCADA的发展历程和应用行业?
直径测量工具的发展历程
未来隧道定位导航技术有哪些发展趋势

室外牵引AGV:惯性测量+卫星定位+激光雷达,我全都要!

AGV惯导应用之无人牵引车惯性测量单元IMU

AI大模型的发展历程和应用前景
3D视觉技术在惯性环上料领域的未来发展
AGV小车上的惯性导航模块运用——SGPM02

【行业前沿】量子技术+惯性导航,美国海军研究实验室的最新研究成果
基于原子体系的量子惯性传感器研究现状综述
导远科技在北京车展展示其自主研发的新一代MEMS惯性导航芯片






 工商网监
工商网监
评论