 如何设置I帧的QP提高I帧的质量
如何设置I帧的QP提高I帧的质量
介绍
在有些应用中,发现I帧不够大。MPSoC VCU CtrlSW可以设置每一帧的QP大小。因此,可以通过设置I帧的QP,提高I帧的大小,从而提高I帧的质量。
代码
下面是设置I帧的QP的示例代码。
GOP长度变量
在struct EncoderSink : IFrameSink的定义里添加GOP的成员变量,记录GOP长度。
#if USER_I_FRAME_QP
// USER_I_FRAME_QP changes START
float uFrameRate = 0.0f;
int uGopLength = 0;
// USER_I_FRAME_QP changes END
#endif // USER_I_FRAME_QP
记录GOP长度
在EncoderSink 的EncoderSink函数设置GOP的变量的值。
struct EncoderSink : IFrameSink
{
EncoderSink(ConfigFile const& cfg, AL_IEncScheduler* pScheduler, AL_TAllocator* pAllocator
) :
CmdFile(cfg.sCmdFileName, false),
EncCmd(CmdFile.fp, cfg.RunInfo.iScnChgLookAhead, cfg.Settings.tChParam[0].tGopParam.uFreqLT),
twoPassMngr(cfg.sTwoPassFileName, cfg.Settings.TwoPass, cfg.Settings.bEnableFirstPassSceneChangeDetection, cfg.Settings.tChParam[0].tGopParam.uGopLength,
cfg.Settings.tChParam[0].tRCParam.uCPBSize / 90, cfg.Settings.tChParam[0].tRCParam.uInitialRemDelay / 90, cfg.MainInput.FileInfo.FrameRate),
qpBuffers{cfg.Settings, cfg.RunInfo.eGenerateQpMode},
pAllocator{pAllocator},
pSettings{&cfg.Settings}
{
#if USER_I_FRAME_QP
// USER_I_FRAME_QP changes STARTED ----------------------------------
uFrameRate = cfg.Settings.tChParam.tRCParam.uFrameRate;
uGopLength = cfg.Settings.tChParam.tGopParam.uGopLength;
// USER_I_FRAME_QP changes END --------------------------------------
#endif // USER_I_FRAME_QP
}
设置QP
在EncoderSink 的ProcessFrame函数里,根据GOP长度,确定每个GOP开始的I帧。然后再设置QP的值。可以试试20-35之间的QP值。QP值是20时,能带来很好的图像质量。
void ProcessFrame(AL_TBuffer* Src) override
{
if(m_picCount == 0)
m_StartTime = GetPerfTime();
if(!Src)
{
LogVerbose("Flushing...\n\n");
if(!AL_Encoder_Process(hEnc, nullptr, nullptr))
throw std::runtime_error("Failed");
return;
}
DisplayFrameStatus(m_picCount);
if(twoPassMngr.iPass)
{
auto pPictureMetaTP = AL_TwoPassMngr_CreateAndAttachTwoPassMetaData(Src);
if(twoPassMngr.iPass == 2)
twoPassMngr.GetFrame(pPictureMetaTP);
}
AL_TBuffer* QpBuf = qpBuffers.getBuffer(m_picCount);
std::shared_ptr QpBufShared(QpBuf, [&](AL_TBuffer* pBuf) { qpBuffers.releaseBuffer(pBuf); });
if(pSettings->hRcPluginDmaContext != NULL)
RCPlugin_SetNextFrameQP(pSettings, pAllocator);
#if USER_I_FRAME_QP
if( 0 == (m_picCount%uGopLength) )
{
AL_Encoder_SetQP(hEnc, 20 );
}
#endif // USER_I_FRAME_QP
if(!AL_Encoder_Process(hEnc, Src, QpBuf))
throw std::runtime_error("Failed");
m_picCount++;
m_picGopCount++;
}
审核编辑:郭婷
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
代码
+关注
关注
30文章
4790浏览量
68647 -
MPSoC
+关注
关注
0文章
199浏览量
24289
发布评论请先 登录
相关推荐
以太网帧格式和功能详解
以太网帧(Ethernet Frame)是以太网(Ethernet)协议用于在局域网(LAN)中传输数据的基本单位。理解以太网帧的结构和传输过程对于掌握局域网通信的原理至关重要。以下将从以太网帧的定义、格式以及功能三个方面进行详
以太网帧结构是怎样的
以太网帧(Ethernet Frame)是以太网(Ethernet)协议用于在局域网(LAN)中传输数据的基本单位。理解以太网帧的结构对于掌握局域网通信的原理至关重要。
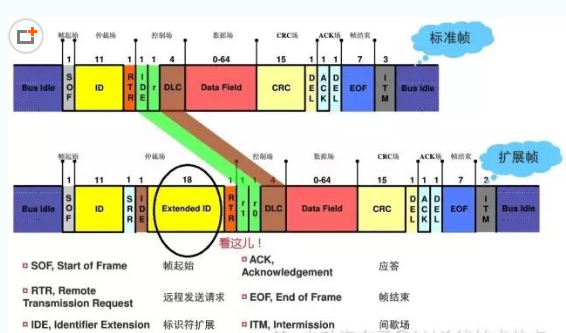
can标准帧和扩展帧能否共存
CAN(Controller Area Network)是一种用于汽车和工业自动化领域的现场总线通信协议。CAN协议具有多种帧格式,包括标准帧和扩展帧。在实际应用中,标准帧和扩展
can标准帧和扩展帧的区别
CAN(Controller Area Network)是一种用于汽车和工业领域的通信协议,它允许多个设备在同一总线上进行通信。CAN协议有两种帧类型:标准帧和扩展帧。这两种帧类型在结
can网络数据帧的特点
特点,在分布式系统中得到了广泛应用。 数据帧的重要性 :数据帧是CAN网络中用于数据传输的基本单元,其结构设计和特性直接关系到整个网络的通信效率和可靠性。 二、数据帧的结构 基本构成 :CAN数据
can数据帧有哪几个域组成
CAN(控制器局域网络)是一种基于消息传递的通信协议,广泛应用于汽车、工业自动化和嵌入式系统等领域。CAN协议的数据帧是用于传输信息的基本单位。 1. CAN数据帧概述 CAN数据帧是一种用于在
CAN数据帧的各个域及其作用
CAN(Controller Area Network)是一种用于汽车电子系统中的通信协议,它具有高可靠性、实时性和灵活性等特点。在CAN通信中,数据帧是最基本的通信单元,用于传输信息。 概述
EtherCAT 数据帧格式和寻址方式简介
EtherCAT是一个高实时性,高速和高效率的工业以太网技术,数据根据自身独有的数据帧格式进行可靠传输,本文主要针对EtherCAT的数据帧格式和寻址方式进行简单描述。EtherCAT的数据帧格式

AMD HYPR-RX支持AMD帧生成技术,助力即刻提升游戏性能
AMD Fluid Motion Frames(AFMF)—AMD帧生成技术,助力AMD Radeon用户在数千款DirectX 11和DirectX 12游戏中,使用帧插值技术来提高帧
为了提高应用的安全性,TLD7002-16ES的帧间延迟应该更长还是更短?
问题:为了提高应用的安全性,TLD7002-16ES的帧间延迟应该更长还是更短? 答案:根据数据表,https://www.infineon.com/dgdl
CAN总线上可以同时存在标准帧和扩展帧吗?
今天做实验,can总线上同时存在标准帧和扩展帧,从上位机上观察到这样的现象:标准帧可以正常接收,但是扩展帧时断时时好??请大神们拍砖解释啊
发表于 02-05 07:41
MODBUS通讯之数据帧格式解读
/slave方式通信。本文主要介绍的MODBUS-RTU。二.MODBUS数据帧组成首先我们要知道一帧正常的MODBUS数据帧包含的内容有:地址域+功能码+数据+差错校






 工商网监
工商网监
评论