 常用的feature scaling方法都有哪些?
常用的feature scaling方法都有哪些?
写在前面
Feature scaling,常见的提法有“特征归一化”、“标准化”,是数据预处理中的重要技术,有时甚至决定了算法能不能work以及work得好不好。谈到feature scaling的必要性,最常用的2个例子可能是:
特征间的单位(尺度)可能不同,比如身高和体重,比如摄氏度和华氏度,比如房屋面积和房间数,一个特征的变化范围可能是[1000, 10000],另一个特征的变化范围可能是[−0.1,0.2],在进行距离有关的计算时,单位的不同会导致计算结果的不同,尺度大的特征会起决定性作用,而尺度小的特征其作用可能会被忽略,为了消除特征间单位和尺度差异的影响,以对每维特征同等看待,需要对特征进行归一化。
原始特征下,因尺度差异,其损失函数的等高线图可能是椭圆形,梯度方向垂直于等高线,下降会走zigzag路线,而不是指向local minimum。通过对特征进行zero-mean and unit-variance变换后,其损失函数的等高线图更接近圆形,梯度下降的方向震荡更小,收敛更快,如下图所示,图片来自Andrew Ng。
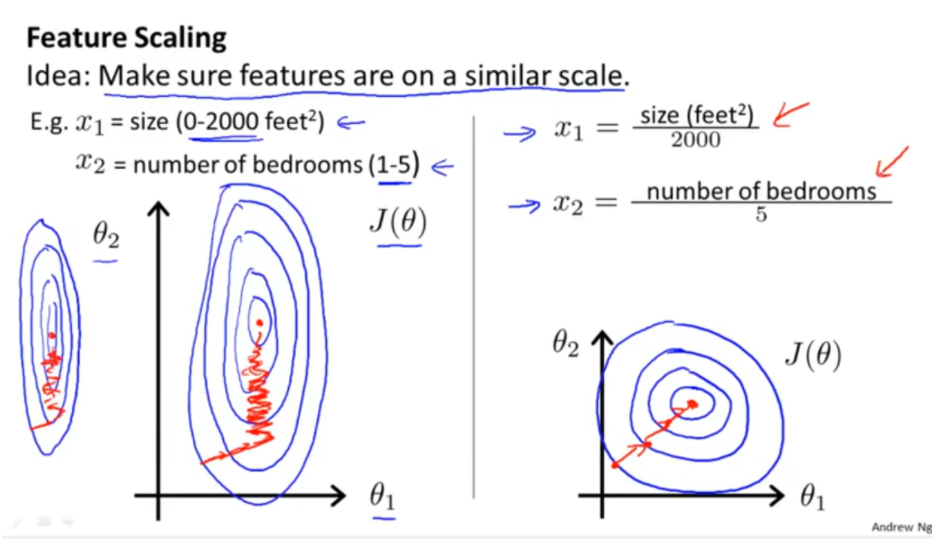
Feature Scaling from Andrew Ng 对于feature scaling中最常使用的Standardization,似乎“无脑上”就行了,本文想多探究一些为什么,
常用的feature scaling方法都有哪些?
什么情况下该使用什么feature scaling方法?有没有一些指导思想?
所有的机器学习算法都需要feature scaling吗?有没有例外?
损失函数的等高线图都是椭圆或同心圆吗?能用椭圆和圆来简单解释feature scaling的作用吗?
如果损失函数的等高线图很复杂,feature scaling还有其他直观解释吗?
根据查阅到的资料,本文将尝试回答上面的问题。但笔者能力有限,空有困惑,能讲到哪算哪吧(微笑)。
常用feature scaling方法
在问为什么前,先看是什么。 给定数据集,令特征向量为x,维数为D,样本数量为R,可构成D×R的矩阵,一列为一个样本,一行为一维特征,如下图所示,图片来自Hung-yi Lee pdf-Gradient Descent:
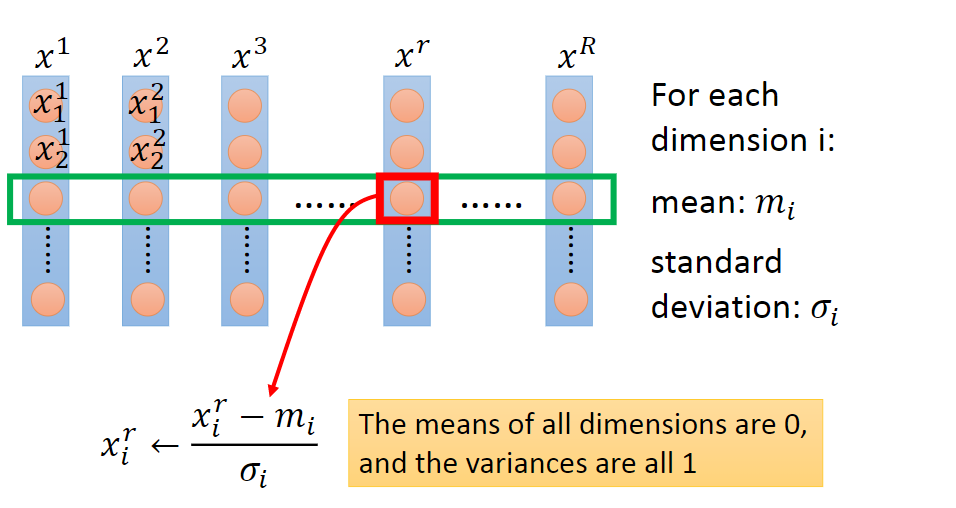
feature matrix feature scaling的方法可以分成2类,逐行进行和逐列进行。逐行是对每一维特征操作,逐列是对每个样本操作,上图为逐行操作中特征标准化的示例。 具体地,常用feature scaling方法如下,来自wiki,
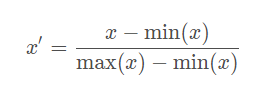
Rescaling (min-max normalization、range scaling):
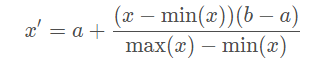
将每一维特征线性映射到目标范围[a,b],即将最小值映射为a,最大值映射为b,常用目标范围为[0,1]和[−1,1],特别地,映射到[0,1]计算方式为:
Mean normalization:
将均值映射为0,同时用最大值最小值的差对特征进行归一化,一种更常见的做法是用标准差进行归一化,如下。
Standardization (Z-score Normalization):
 每维特征0均值1方差(zero-mean and unit-variance)。
每维特征0均值1方差(zero-mean and unit-variance)。
Scaling to unit length:
 将每个样本的特征向量除以其长度,即对样本特征向量的长度进行归一化,长度的度量常使用的是L2 norm(欧氏距离),有时也会采用L1 norm,不同度量方式的一种对比可以参见论文“CVPR2005-Histograms of Oriented Gradients for Human Detection”。 上述4种feature scaling方式,前3种为逐行操作,最后1种为逐列操作。容易让人困惑的一点是指代混淆,Standardization指代比较清晰,但是单说Normalization有时会指代min-max normalization,有时会指代Standardization,有时会指代Scaling to unit length。
将每个样本的特征向量除以其长度,即对样本特征向量的长度进行归一化,长度的度量常使用的是L2 norm(欧氏距离),有时也会采用L1 norm,不同度量方式的一种对比可以参见论文“CVPR2005-Histograms of Oriented Gradients for Human Detection”。 上述4种feature scaling方式,前3种为逐行操作,最后1种为逐列操作。容易让人困惑的一点是指代混淆,Standardization指代比较清晰,但是单说Normalization有时会指代min-max normalization,有时会指代Standardization,有时会指代Scaling to unit length。
计算方式上对比分析
前3种feature scaling的计算方式为减一个统计量再除以一个统计量,最后1种为除以向量自身的长度。
减一个统计量可以看成选哪个值作为原点,是最小值还是均值,并将整个数据集平移到这个新的原点位置。如果特征间偏置不同对后续过程有负面影响,则该操作是有益的,可以看成是某种偏置无关操作;如果原始特征值有特殊意义,比如稀疏性,该操作可能会破坏其稀疏性。
除以一个统计量可以看成在坐标轴方向上对特征进行缩放,用于降低特征尺度的影响,可以看成是某种尺度无关操作。缩放可以使用最大值最小值间的跨度,也可以使用标准差(到中心点的平均距离),前者对outliers敏感,outliers对后者影响与outliers数量和数据集大小有关,outliers越少数据集越大影响越小。
除以长度相当于把长度归一化,把所有样本映射到单位球上,可以看成是某种长度无关操作,比如,词频特征要移除文章长度的影响,图像处理中某些特征要移除光照强度的影响,以及方便计算余弦距离或内积相似度等。
稀疏数据、outliers相关的更多数据预处理内容可以参见scikit learn-5.3. Preprocessing data。 从几何上观察上述方法的作用,图片来自CS231n-Neural Networks Part 2: Setting up the Data and the Loss,zero-mean将数据集平移到原点,unit-variance使每维特征上的跨度相当,图中可以明显看出两维特征间存在线性相关性,Standardization操作并没有消除这种相关性。
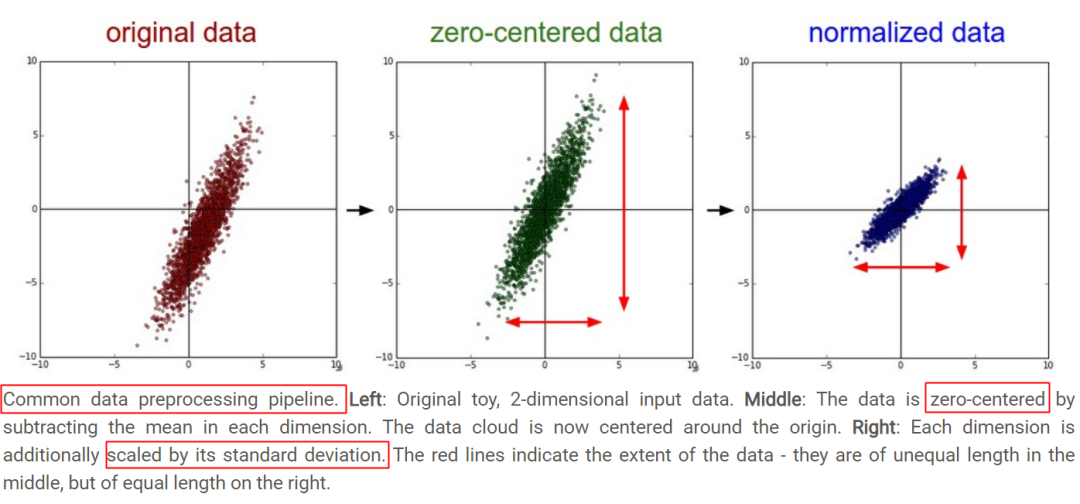
Standardization 可通过PCA方法移除线性相关性(decorrelation),即引入旋转,找到新的坐标轴方向,在新坐标轴方向上用“标准差”进行缩放,如下图所示,图片来自链接,图中同时描述了unit length的作用——将所有样本映射到单位球上。
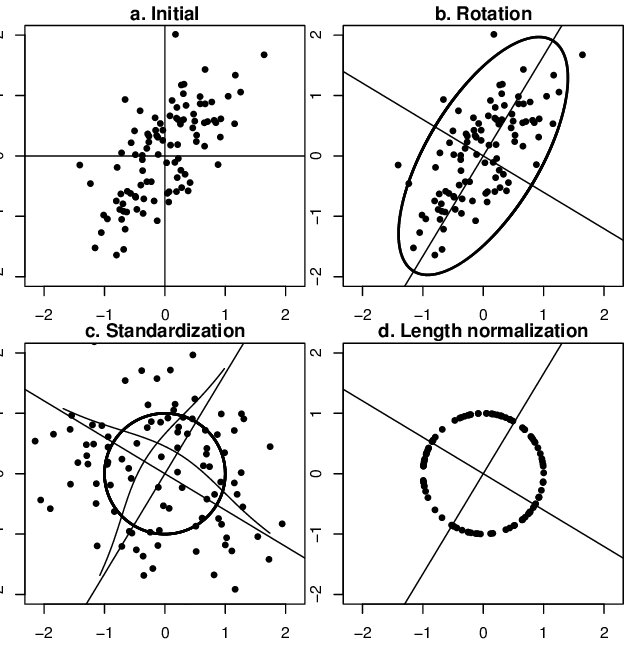
Effect of the operations of standardization and length normalization 当特征维数更多时,对比如下,图片来自youtube,
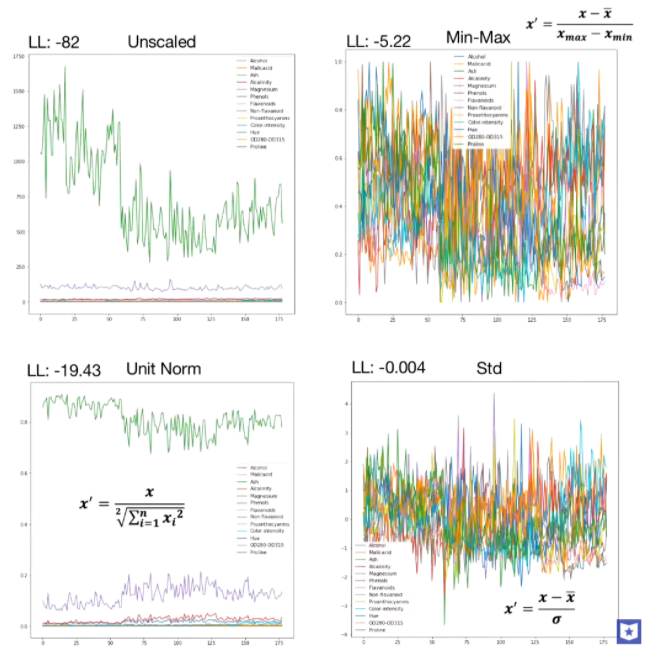
feature scaling comparison 总的来说,归一化/标准化的目的是为了获得某种“无关性”——偏置无关、尺度无关、长度无关……当归一化/标准化方法背后的物理意义和几何含义与当前问题的需要相契合时,其对解决该问题就有正向作用,反之,就会起反作用。所以,“何时选择何种方法”取决于待解决的问题,即problem-dependent。
feature scaling 需要还是不需要
下图来自data school-Comparing supervised learning algorithms,对比了几个监督学习算法,最右侧两列为是否需要feature scaling。
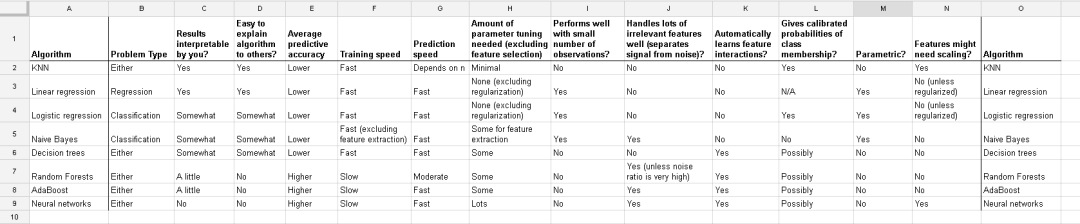
Comparing supervised learning algorithms 下面具体分析一下。
什么时候需要feature scaling?
涉及或隐含距离计算的算法,比如K-means、KNN、PCA、SVM等,一般需要feature scaling,因为:
zero-mean一般可以增加样本间余弦距离或者内积结果的差异,区分力更强,假设数据集集中分布在第一象限遥远的右上角,将其平移到原点处,可以想象样本间余弦距离的差异被放大了。在模版匹配中,zero-mean可以明显提高响应结果的区分度。 就欧式距离而言,增大某个特征的尺度,相当于增加了其在距离计算中的权重,如果有明确的先验知识表明某个特征很重要,那么适当增加其权重可能有正向效果,但如果没有这样的先验,或者目的就是想知道哪些特征更重要,那么就需要先feature scaling,对各维特征等而视之。 增大尺度的同时也增大了该特征维度上的方差,PCA算法倾向于关注方差较大的特征所在的坐标轴方向,其他特征可能会被忽视,因此,在PCA前做Standardization效果可能更好,如下图所示,图片来自scikit learn-Importance of Feature Scaling,
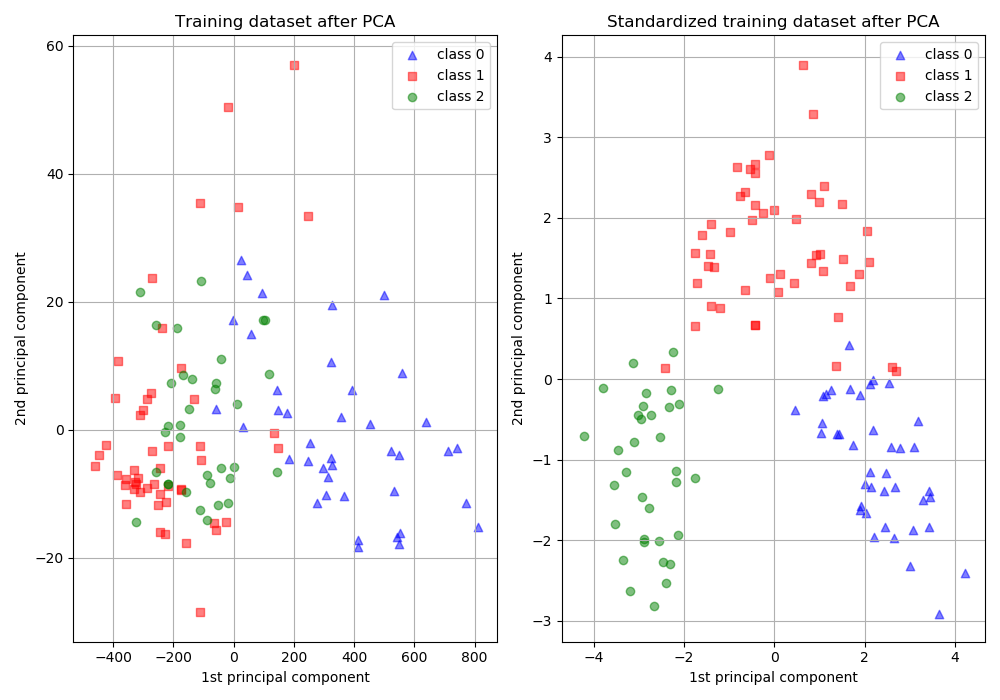
PCA and Standardization
损失函数中含有正则项时,一般需要feature scaling:对于线性模型y=wx+b而言,x的任何线性变换(平移、放缩),都可以被w和b“吸收”掉,理论上,不会影响模型的拟合能力。但是,如果损失函数中含有正则项,如λ∣∣w∣∣^2,λ为超参数,其对w的每一个参数施加同样的惩罚,但对于某一维特征xi而言,其scale越大,系数wi越小,其在正则项中的比重就会变小,相当于对wi惩罚变小,即损失函数会相对忽视那些scale增大的特征,这并不合理,所以需要feature scaling,使损失函数平等看待每一维特征。
梯度下降算法,需要feature scaling。梯度下降的参数更新公式如下,
E(W)为损失函数,收敛速度取决于:参数的初始位置到local minima的距离,以及学习率η的大小。一维情况下,在local minima附近,不同学习率对梯度下降的影响如下图所示:
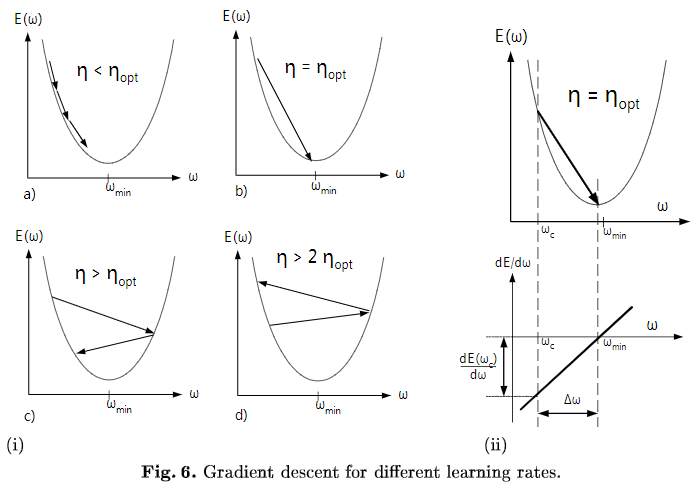
Gradient descent for different learning rates 多维情况下可以分解成多个上图,每个维度上分别下降,参数W为向量,但学习率只有1个,即所有参数维度共用同一个学习率(暂不考虑为每个维度都分配单独学习率的算法)。收敛意味着在每个参数维度上都取得极小值,每个参数维度上的偏导数都为0,但是每个参数维度上的下降速度是不同的,为了每个维度上都能收敛,学习率应取所有维度在当前位置合适步长中最小的那个。下面讨论feature scaling对gradient descent的作用,
不同方向上的下降速度变化不同(二阶导不同,曲率不同),恰由输入的协方差矩阵决定,通过scaling改变了损失函数的形状,减小不同方向上的曲率差异。将每个维度上的下降分解来看,给定一个下降步长,如果不够小,有的维度下降的多,有的下降的少,有的还可能在上升,损失函数的整体表现可能是上升也可能是下降,就会不稳定。scaling后不同方向上的曲率相对更接近,更容易选择到合适的学习率,使下降过程相对更稳定。
zero center与参数初始化相配合,缩短初始参数位置与local minimum间的距离,加快收敛。模型的最终参数是未知的,所以一般随机初始化,比如从0均值的均匀分布或高斯分布中采样得到,对线性模型而言,其分界面初始位置大致在原点附近,bias经常初始化为0,则分界面直接通过原点。同时,为了收敛,学习率不会很大。而每个数据集的特征分布是不一样的,如果其分布集中且距离原点较远,比如位于第一象限遥远的右上角,分界面可能需要花费很多步骤才能“爬到”数据集所在的位置。所以,无论什么数据集,先平移到原点,再配合参数初始化,可以保证分界面一定会穿过数据集。此外,outliers常分布在数据集的外围,与分界面从外部向内挪动相比,从中心区域开始挪动可能受outliers的影响更小。
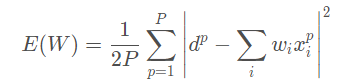
对于采用均方误差损失LMS的线性模型,损失函数恰为二阶,如下图所示
另有从Hessian矩阵特征值以及condition number角度的理解,详见Lecun paper-Efficient BackProp中的Convergence of Gradient Descent一节,有清晰的数学描述,同时还介绍了白化的作用——解除特征间的线性相关性,使每个维度上的梯度下降可独立看待。
文章开篇的椭圆形和圆形等高线图,仅在采用均方误差的线性模型上适用,其他损失函数或更复杂的模型,如深度神经网络,损失函数的error surface可能很复杂,并不能简单地用椭圆和圆来刻画,所以用它来解释feature scaling对所有损失函数的梯度下降的作用,似乎过于简化,见Hinton vedio-3.2 The error surface for a linear neuron。
对于损失函数不是均方误差的情况,只要权重w与输入特征x间是相乘关系,损失函数对w的偏导必然含有因子x,w的梯度下降速度就会受到特征x尺度的影响。理论上为每个参数都设置上自适应的学习率,可以吸收掉x尺度的影响,但在实践中出于计算量的考虑,往往还是所有参数共用一个学习率,此时x尺度不同可能会导致不同方向上的下降速度悬殊较大,学习率不容易选择,下降过程也可能不稳定,通过scaling可对不同方向上的下降速度有所控制,使下降过程相对更稳定。
对于传统的神经网络,对输入做feature scaling也很重要,因为采用sigmoid等有饱和区的激活函数,如果输入分布范围很广,参数初始化时没有适配好,很容易直接陷入饱和区,导致梯度消失,所以,需要对输入做Standardization或映射到[0,1]、[−1,1],配合精心设计的参数初始化方法,对值域进行控制。但自从有了Batch Normalization,每次线性变换改变特征分布后,都会重新进行Normalization,似乎可以不太需要对网络的输入进行feature scaling了?但习惯上还是会做feature scaling。
什么时候不需要Feature Scaling?
与距离计算无关的概率模型,不需要feature scaling,比如Naive Bayes; 与距离计算无关的基于树的模型,不需要feature scaling,比如决策树、随机森林等,树中节点的选择只关注当前特征在哪里切分对分类更好,即只在意特征内部的相对大小,而与特征间的相对大小无关。
小结
这篇文章写得十分艰难,一开始以为蛮简单直接,但随着探索的深入,冒出的问号越来越多,打破了很多原来的“理所当然”,所以,在写的过程中不停地做加法,很多地方想解释得尽量直观,又不想照搬太多公式,但自己的理解又不够深刻,导致现在叙述这么冗长,希望以后在写文时能更专注更精炼。
审核编辑 :李倩
-
算法
+关注
关注
23文章
4622浏览量
93072 -
函数
+关注
关注
3文章
4338浏览量
62770
原文标题:小结
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
Jtti:常用的网络质量监控方法有哪些
常用的devops工具集成方法
我常用的分析方法——输入输出阻抗,是怎么玩的?你会不?






 工商网监
工商网监
评论