 Exaflop简史
Exaflop简史

Exaflop 是衡量超级计算机性能的单位,表示该计算机每秒可至少进行百亿亿次浮点运算。
为了解决这个时代最复杂的问题,比如如何治疗像新冠肺炎和癌症这样的疾病、以及如何缓解气候变化等。计算机的计算量正在不断增加。
所有这些重大挑战将计算带入了现今的百亿亿次级时代,顶级性能通常以 exaflops 来衡量。
什么是 Exaflop?
Exaflop 是衡量超级计算机性能的单位,表示该计算机每秒可以至少进行 10^18 或百亿亿次浮点运算。
Exaflop 中的 exa-前缀表示“百亿亿”,即 10 亿乘以 10 亿或1的后面有 18 个零。同样,单个 exabyte 的内存子系统可以储存百亿亿字节的数据。
exaflop 中的“flop”是浮点运算的缩写。exaflop/s 是表示系统每秒浮点运算次数的单位。
浮点是指所有数字都用小数点表示的计算方法。
1000 Petaflop = 1 Exaflop
前缀 peta- 表示 10^15,即 1 的后面有 15 个零。因此 1 exaflop 等于 1000 petaflop。

1 exaflop 的计算量到底有多大?相当于十亿人中的每个人都拿着十亿个计算器。
如果他们同时按下等号,就是进行了 1 个 exaflop。
拥有 Big Red 200 和其他几台超级计算机的印第安纳大学表示,exaflop 计算机的速度相当于一个人每秒钟进行一次计算,并一直计算 31,688,765,000 年。
Exaflop 简史
在超级计算发展史的大部分时间里,一次浮点运算就是一次,但随着工作负载引入 AI ,这种情况也发生了变化。
人们开始使用最高的精度格式来表示数字,这种格式被称为双精度,由 IEEE 浮点运算标准定义。它之所以被称为双精度或 FP64,是因为计算中的每个数字都需要以 64 位用 0 或 1 表示的数据块表示,而单精度为 32 位。
双精度使用 64 位确保每个数字都精确到很细微的部分,比如 1.0001 + 1.0001 = 2.0002,而不是 1 + 1 = 2。
这种格式非常适合当时的大部分工作负载,比如从原子到飞机等全部需要确保模拟结果接近于真实的模拟。
因此,当 1993 年全球最强大的超级计算机榜单 TOP500 首次发布时,衡量 FP64 数学性能的 LINPACK 基准(又称HPL)自然成为了默认的衡量标准。
AI 大爆炸
十年前,计算行业发生了 NVIDIA 首席执行官黄仁勋所说的 AI 大爆炸。
这种强大的新计算形式开始在科学和商业应用上展现出重大成果,而且它运用了一些非常不同的数学方法。
深度学习并不是模拟真实世界中的物体,而是在堆积如山的数据中筛选,以找到能够带来新洞察的模式。
这种数学方法需要很高的吞吐量,所以用经过简化的数字(比如使用 1.01 而不是 1.0001)进行大量计算要比用更复杂的数字进行少量计算好得多。
因此 AI 使用 FP32、FP16 和 FP8 等低精度格式,通过 32 位、16 位和 8 位数让用户更快地进行更多计算。
混合精度不断发展
AI 使用 64 位数就如同在周末外出时带着整个衣柜。
研究人员一直在积极地为 AI 寻找理想的低精度技术。
例如首个 NVIDIA Tensor Core GPU——Volta,它使用了混合精度,并以 FP16 格式执行矩阵乘法,然后用 FP32 累积结果以获得更高的精度。
Hopper 通过 FP8 加速
最近,NVIDIA Hopper 架构首次发布了速度更快的低精度 AI 训练方法。Hopper Transformer Engine 能够自动分析工作负载,尽可能采用 FP8 并以 FP32 累积结果。
在进行计算密集度较低的推理工作,比如在生产中运行 AI 模型时,TensorFlow 和 PyTorch 等主要框架通过支持 8 位整数实现快速性能,因为这样就不需要使用小数点来完成工作。
好消息是,NVIDIA GPU 支持上述所有精度格式,因此用户可以实现每个工作负载的最优加速。
去年,IEEE P3109 委员会开始为机器学习中使用的精度格式制定行业标准。这项工作可能还需要一到两年的时间才能完成。
一些模拟软件在低精度工作中大放异彩
虽然 FP64 在模拟工作中仍然很受欢迎,但当低精度数学能够更快提供可用结果时,许多人会使用后者。
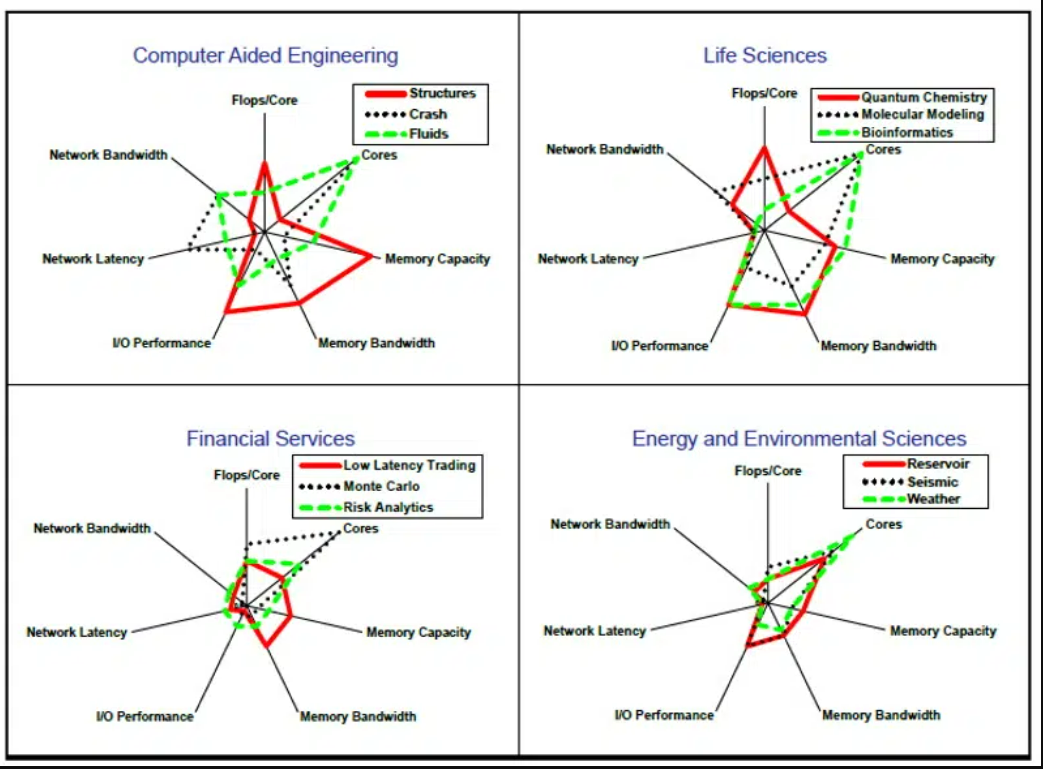
影响 HPC 应用程序性能的因素各不相同
例如,研究人员用 FP32 运行广受欢迎的汽车碰撞模拟器——Ansys LS-Dyna。基因组学也倾向于使用低精度数学。
此外,许多传统的模拟开始在部分工作流程中采用 AI。随着越来越多的工作负载使用 AI,超级计算机需要支持较低的精度才能有效运行这些新兴应用。
基准与工作负载同步发展
在认识到这些变化后,包括 Jack Dongarra(2021 年图灵奖得主和 HPL 的贡献者)在内的研究人员在 2019 年首次发布了 HPL-AI,这项新基准更适合测量新的工作负载。
Dongarra 在 2019 年的博客中表示:“无论是技术不断优化的传统模拟,还是 AI 应用,混合精度技术对于提高超级计算机的计算效率越来越重要。正如 HPL 实现了对双精度能力的基准测试一样,这种基于 HPL 的新方法可以对超级计算机的混合精度能力进行大规模基准测试。”
尤利希超级计算中心主任 Thomas Lippert 同意了这一观点。
他在去年发表的一篇博客中表示:“我们使用 HPL-AI 基准是因为它既能够准确地衡量日益增加的 AI 和科学工作负载中的混合精度工作,也能反映准确的 64 位浮点计算结果。”
现今的 Exaflop 系统
在 6 月的一份报告中,全球 20 个超级计算机中心提交了 HPL-AI 结果,其中有三个中心提供了超过 1 exaflop 的性能。
在这些系统中,橡树岭国家实验室的超级计算机在 HPL 上的 FP64 性能也超过了 1 exaflop。
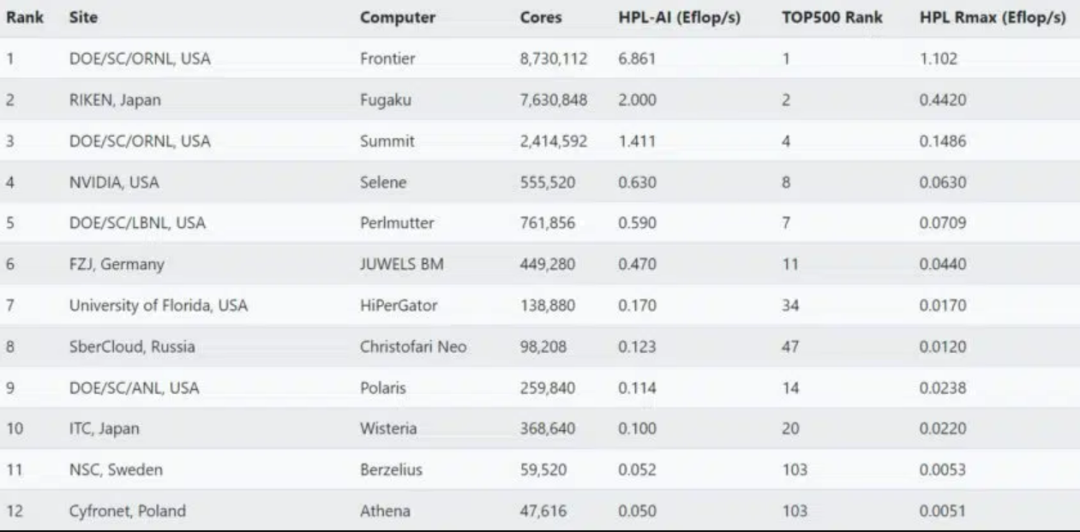
2022 年 6 月 HPL-AI 结果的采样器
两年前,一非传统系统首次达到 1 exaflop。这台由 Folding@home 联盟组装的众源超级计算机在呼吁帮助抵御新冠疫情后,达到了这一里程碑,到现在已有超过 100 万台计算机加入其中。
理论和实践中的Exaflop
许多组织从那时起就已开始安装理论峰值性能超过 1 exaflop 的超级计算机。需要注意的是,TOP500 榜单同时发布 Rmax(实际)和 Rpeak(理论)分数。
Rmax 指计算机实际表现出的最佳性能。
Rpeak 是一切系统都处于高水平运行时的最高理论性能,而这几乎从未发生过。该数值的计算方法通常是将系统中的处理器数量乘以其时钟速度,然后再将结果乘以处理器在一秒钟内可执行的浮点运算数。
因此,如果有人说他们的系统达到 1 exaflop,请询问他说的是 Rmax(实际)还是Rpeak(理论)。
Exaflop 时代的众多指标
这也是新百亿亿次时代的众多细微变化之一。
值得注意的是,HPL 和 HPL-AI 属于合成基准,即它们衡量的是数学程序的性能,而不是真实世界的应用。MLPerf 等其他基准则基于真实世界中的工作负载。
最后,衡量系统性能的最佳标准当然是它运行用户应用程序的情况。该衡量标准不是基于 exaflop,而是基于投资回报率。
审核编辑:汤梓红
-
NVIDIA
+关注
关注
14文章
5696浏览量
110142 -
计算机
+关注
关注
19文章
7841浏览量
93495 -
AI
+关注
关注
91文章
41326浏览量
302723
原文标题:什么是 Exaflop?
文章出处:【微信号:NVIDIA-Enterprise,微信公众号:NVIDIA英伟达企业解决方案】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
AI算力重塑光通信:磷化铟与薄膜铌酸锂的关键角色
自动驾驶有了占用网络还需要卷积神经网络吗?

【瑞萨RA2L1入门学习】+ touch控制OLED
2026深入拆解:Gemini 3.0 镜像官网如何理解 FPGA 时序约束并自动生成 SDC 文件

晶振频率漂移的主要成因与机理分析的详解

嵌入式2---在单片机里实现module_init机制

深度学习为什么还是无法处理边缘场景?

2026年,各车企的自动驾驶方案到了什么阶段(二)?

氮化硅陶瓷气压烧结后需要热等静压(HIP)处理吗?

2026年,各车企的自动驾驶方案到了什么阶段(一)?

嵌入式开发工具的现状和发展简史
一文读懂京东技术发展简史
物联网20年简史




评论