 STRUC:定义结构类型
STRUC:定义结构类型
STRUC:定义结构类型
结构是不同数据类型的组合。
可以使用点分隔符或聚合来初始化结构元素。
参数的顺序无关紧要。
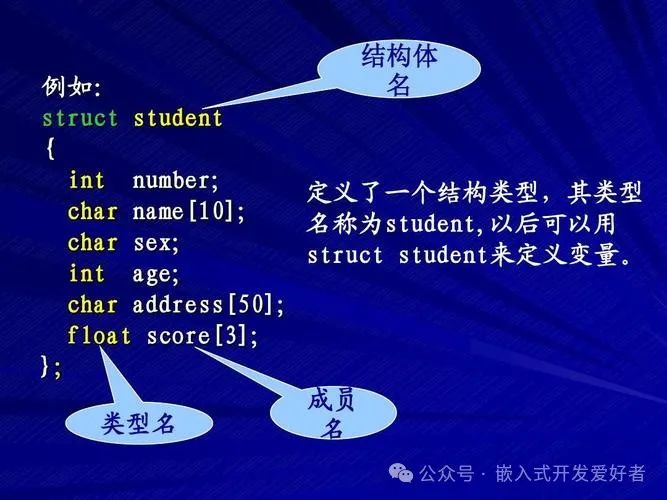
结构类型的定义 (=STRUC 数据类型)。在此将多个数据类型汇总为一个新的数据类型。
GLOBAL: 在 $CONFIG.DAT 中不允许使用用关键词 GLOBAL 定义的数据类型。
名称结构类型: 新结构类型的名称。自定义数据类型的名称应以 _TYP 结尾,以便可将其与变量名称进行区分。
数据类型: 类型:任意的数据类型,即使结构类型也允许用作数据类型。
部件: 组件的名称。在结构类型之内只允许进行一次。只在栏拥有 CHAR 类型且是一维时,才允许将其用作结构类型的组件。为此,在结构类型的定义中,在栏的名称上将栏限制用方括号括起来。
给以 STRUC 数据类型为基础的变量分配值有 2 种方法:
给变量的多个分量分配值:用集合
给一个变量的单个分量分配一个值:用点分隔符
集合提示:
一个集合的值可以是简单的常数或集合本身,但是它们不能是变量
在一个集合中不必指定结构的所有分量。
分量不需要按已定义的顺序指定。
在一个集合中只允许含有每个分量一次。
在集合的开头,通过冒号隔开的结构类型名称可能已指定。
示例:
用 REAL 数据类型的分量 NUMBER 和 CHAR 数据类型的数组分量 TEXT[80] 定义结构类型 S_TYP。
STRUC S_TYP REAL NUMBER, CHAR TEXT[80]
将集合用作集合值的示例:
STRUC INNER_TYP INT A, B, C
STRUC OUTER_TYP INNER_TYP Q, R
DECL OUTER_TYP MYVAR
...
MYVAR = {Q {A 1, B 4}, R {A 3, C 2}}
状态 (S) 和转角方向 (T) 是数据类型 POS 和 E6POS 的组成部分:
STRUC POS REAL X, Y, Z, A, B, C, INT S, T
STRUC E6POS REAL X, Y, Z, A, B, C, E1, E2, E3, E4, E5, E6, INT S, T
AXIS 结构类型
A1 至 A6 是指与机器人轴 1 至 6 相关运行的角度值 (旋转轴)或平移值(平移轴)。
STRUC AXIS REAL A1, A2, A3, A4, A5, A6
预定义结构的示例:
STRUC E6POS REAL X, Y, Z, A, B, C, E1, E2, E3, E4, E5, E6, INT S, T
带有点分隔符和聚合的赋值示例:
DECL POS Position ;变量声明
;POS类型的“位置”
Position.X = 34.4 ;X 的赋值
;带有点分隔符的组件
Position.Y = value ;Y 的赋值
;带有点分隔符的组件
Position = {X 34.4, Y -23.2} ;赋值
审核编辑 :李倩
-
struc
+关注
关注
0文章
3浏览量
6863 -
变量
+关注
关注
0文章
613浏览量
28568 -
数据类型
+关注
关注
0文章
236浏览量
13694
原文标题:KUKA变量 STRUC:定义结构类型
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
对象存储是什么结构类型?
连接器元件的定义和结构特点
SIM卡座按结构类型可划分成哪些







 工商网监
工商网监
评论