 基于超宽带传感器和惯性测量单元融合的定位算法
基于超宽带传感器和惯性测量单元融合的定位算法
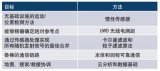
据麦姆斯咨询报道,为了解决非视距(Non-Line-of-Sight,NLOS)影响下,单一传感器的室内定位问题,来自深圳大学和国家无线电监测中心的研究人员提出了基于超宽带(Ultra-Wide Band,UWB)传感器和惯性测量单元(Inertial Measurement Unit,IMU)融合的定位算法,实现在NLOS场景下的高精度室内定位系统。相关研究成果以论文形式发表于《无线电工程》期刊。
定位系统描述
基于自组织的分布式网络管理模型如图1所示,主要由3部分组成:网管服务器、分布式网络代理(Distributed Network Agent,DNA)和被管设备。
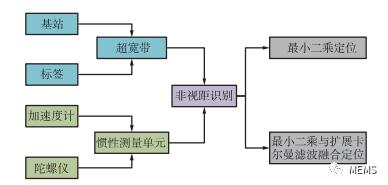
图1 自组织的分布式网络管理模型
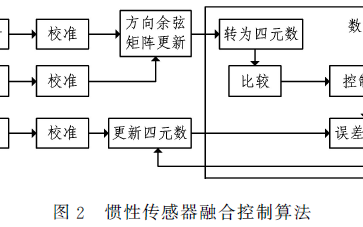
此外,IMU传感器中的陀螺仪通过姿态矩阵进行姿态解算,加速度计通过二次积分获得位置信息。UWB通过基站与标签之间的通信解算出位置信息。通过当前位置和UWB测得的距离信息采用支持向量机(Support Vector Machine,SVM)进行NLOS信号的识别分类。
NLOS信号的检测
虽然UWB技术具有较强的抗干扰能力和抗多径衰弱能力,但是在NLOS情况下,UWB信号的测距定位能力将大大降低。因此在进行UWB定位时,要进行NLOS的识别。在双向测距(Two-way Ranging,TWR)的解算过程中,脉冲信号一共传递了3次。当出现障碍物遮挡时,信号的传输会多次受到NLOS的影响,相比于前一时刻的信号传播时间会出现较大的跳变。因此,研究人员提出使用机器学习的方式,利用支持向量机(Support Vector Machine,SVM)对实际场景中的NLOS和LOS情况下的距离测量值进行训练,得到符合对应应用场景的分辨阈值。由于移动障碍物可能会对UWB系统的NLOS测距结果产生规律性的影响,因此通过设置障碍物的位置模拟NLOS场景,并研究障碍物位置与NLOS检测之间的关系。NLOS/LOS样点采集模型如图2所示。
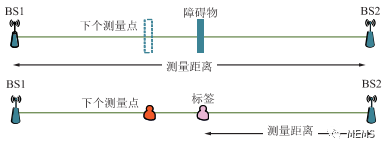
图2 NLOS/LOS样点采集模型
IMU和UWB融合定位仿真实验
为了验证所提出的算法的性能,研究人员通过仿真实验进行模拟。在不同观测噪声下,通过最小二乘法(Least Squares Method,LS)和LS-扩展卡尔曼滤波(EKF)算法的定位轨迹如图3(a)所示。在同等观测噪声下,UWB和IMU经过EKF滤波过后的定位轨迹要比只经过LS定位算法的定位轨迹数据抖动更小,轨迹更加平滑。且观测噪声也会对定位结果有较大影响。图3(b)显示了2种算法的误差变化趋势。在观测噪声R=0.1时,经过LS算法定位的轨迹误差在0.1-1.4m抖动,经过EKF滤波后定位误差下降并逐渐保持稳定在0.2-0.4m。在观测噪声R=0.01时,LS-EKF算法的误差明显要比LS算法平滑得多,且定位误差更小。图3(c)是2种算法对应的误差累计分布函数(Cumulative Distribution Function,CDF)图,在观测噪声R=0.1时,LS和LS-EKF算法在仿真的数据范围内的最大误差分别为1.3m和0.85m;在观测噪声R=0.01时,LS和LS-EKF算法在仿真的数据范围内的最大误差分别为0.3m和0.2m。
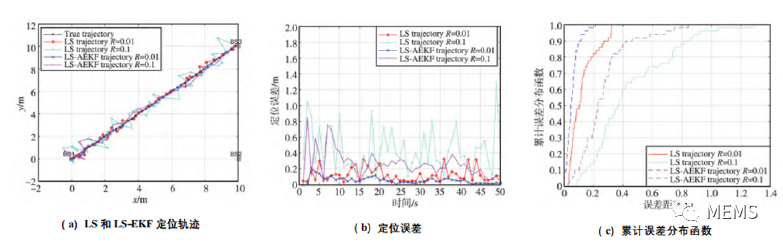
图3 LS和LS-EKF定位算法
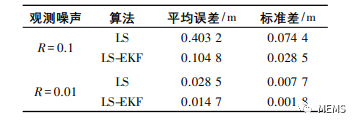
LS和LS-EKF算法平均误差和标准差如表1所示,在观测噪声R=0.1时,LS和LS-EKF算法平均误差为0.4032m和0.1048m,误差的标准差大小为0.0744m和0.0285m。在观测噪声R=0.01时,LS和LS-EKF算法平均误差为0.0285m和0.0147m,误差的标准差大小为0.0077m和0.0018m。在观测噪声分别为R=0.1和R=0.01时,相较于LS算法,LS-EKF算法的定位精度分别提高了74%和48%。因此,所提出的算法能很好地识别和缓解NLOS带来的定位误差。
表1 LS和LS-EKF算法平均误差和标准差
-
传感器
+关注
关注
2554文章
51635浏览量
758047 -
服务器
+关注
关注
12文章
9383浏览量
86366 -
超宽带
+关注
关注
1文章
200浏览量
23671
原文标题:非视距环境下超宽带传感器和惯性测量单元融合的定位系统
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
寻求惯性测量单元传感器ADIS16365的PCB接口封装
基于MEMS的 FIS1100惯性测量装置IC 及融合软件
uwb超宽带定位原理全面解析
UWB超宽带定位技术概念
MEMS惯性传感器轻松解决应急救援定位问题
超宽带无线传感器网络MAC协议
超宽带定位有哪几种常用的算法(三种方法详解)
MEMS惯性传感器到云传感器融合系统的定位系统
基于惯性传感器融合控制算法的手语识别方案






 工商网监
工商网监
评论