 Linux内核之ISP驱动流程分析
Linux内核之ISP驱动流程分析
ISP驱动分析
Linux版本: 4.19
芯片平台: RK3399/RK3288
源码路径:
drivers/media/platform/rk-isp10/cif_isp10_v4l2.c
drivers/media/platform/rk-isp10/cif_isp10.c
(1)装载和卸载函数
//DTS匹配
static const struct of_device_id cif_isp10_v4l2_of_match[] = {
{.compatible = "rockchip,rk3288-cif-isp",
.data = (void *)&rk3288_cfg},
{.compatible = "rockchip,rk3399-cif-isp",
.data = (void *)&rk3399_cfg},
{},
};
static struct platform_driver cif_isp10_v4l2_plat_drv = {
.driver = {
.name = DRIVER_NAME,
.of_match_table = of_match_ptr(cif_isp10_v4l2_of_match),
.pm = &cif_isp10_dev_pm_ops,
},
.probe = cif_isp10_v4l2_drv_probe,
.remove = cif_isp10_v4l2_drv_remove,
.suspend = cif_isp10_v4l2_drv_suspend,
.resume = cif_isp10_v4l2_drv_resume,
};
static int cif_isp10_v4l2_init(void)
{
int ret;
g_cif_isp10_v4l2_dev_cnt = 0;
ret = platform_driver_register(&cif_isp10_v4l2_plat_drv); //注册platform_driver
if (ret) {
cif_isp10_pltfrm_pr_err(NULL,
"cannot register platform driver, failed with %d\n",
ret);
return -ENODEV;
}
return ret;
}
static void __exit cif_isp10_v4l2_exit(void)
{
platform_driver_unregister(&cif_isp10_v4l2_plat_drv);
}
上面就是简单地注册了一个platform设备。
(2)probe()
static int cif_isp10_v4l2_drv_probe(struct platform_device *pdev)
{
const struct of_device_id *match;
struct device_node *node = pdev->dev.of_node;
struct cif_isp10_device *dev = NULL;
struct cif_isp10_v4l2_device *cif_isp10_v4l2_dev;
int ret;
//........
//分配cif_isp10_v4l2_device
cif_isp10_v4l2_dev = devm_kzalloc(
&pdev->dev,
sizeof(struct cif_isp10_v4l2_device),
GFP_KERNEL);
//.....
match = of_match_node(cif_isp10_v4l2_of_match, node); //获取匹配的是RK3288还是RK3399
dev = cif_isp10_create(&pdev->dev, //创建cif_isp10_device
cif_isp10_v4l2_event,
cif_isp10_v4l2_requeue_bufs,
(struct pltfrm_soc_cfg *)match->data);
//......
dev->dev_id = g_cif_isp10_v4l2_dev_cnt;
dev->isp_dev.dev_id = &dev->dev_id;
dev->nodes = (void *)cif_isp10_v4l2_dev;
dev->isp_state = CIF_ISP10_STATE_IDLE;
spin_lock_init(&dev->vbq_lock);
spin_lock_init(&dev->vbreq_lock);
spin_lock_init(&dev->iowrite32_verify_lock);
spin_lock_init(&dev->isp_state_lock);
init_waitqueue_head(&dev->isp_stop_wait);
mutex_init(&dev->api_mutex);
ret = v4l2_device_register(dev->dev, &dev->v4l2_dev); //注册v4l2_device
//......
ret = cif_isp10_v4l2_register_video_device( //注册video_device, 即生成/dev/videox节点,该节点具有VIDEO_OVERLAY功能
dev,
&cif_isp10_v4l2_dev->node[SP_DEV].vdev, //SP:selfpath
SP_VDEV_NAME,
V4L2_CAP_VIDEO_OVERLAY,
CIF_ISP10_V4L2_SP_DEV_MAJOR,
&cif_isp10_v4l2_fops,
&cif_isp10_v4l2_sp_ioctlops);
if (ret)
goto err;
ret = register_cifisp_device(&dev->isp_dev, //注册ISP video_device
&cif_isp10_v4l2_dev->node[ISP_DEV].vdev,
&dev->v4l2_dev,
dev->config.base_addr);
if (ret)
goto err;
ret = cif_isp10_v4l2_register_video_device( //注册video_device, 即生成/dev/videox节点,该节点具有VIDEO_CAPTURE功能
dev,
&cif_isp10_v4l2_dev->node[MP_DEV].vdev, //MP:mainpath
MP_VDEV_NAME,
V4L2_CAP_VIDEO_CAPTURE,
CIF_ISP10_V4L2_MP_DEV_MAJOR,
&cif_isp10_v4l2_fops,
&cif_isp10_v4l2_mp_ioctlops);
if (ret)
goto err;
ret = cif_isp10_v4l2_register_video_device( //注册video_device, 即生成/dev/videox节点,该节点具有VIDEO_OUTPUT功能
dev,
&cif_isp10_v4l2_dev->node[DMA_DEV].vdev,
DMA_VDEV_NAME,
V4L2_CAP_VIDEO_OUTPUT,
CIF_ISP10_V4L2_DMA_DEV_MAJOR,
&cif_isp10_v4l2_fops,
&cif_isp10_v4l2_dma_ioctlops);
if (ret)
goto err;
cif_isp10_v4l2_register_imgsrc_subdev( //注册v4l2_subdev,关联v4l2_device和v4l2_subdev
dev);
pm_runtime_enable(&pdev->dev);
g_cif_isp10_v4l2_dev[g_cif_isp10_v4l2_dev_cnt] =
cif_isp10_v4l2_dev;
g_cif_isp10_v4l2_dev_cnt++;
return 0;
err:
cif_isp10_destroy(dev);
return ret;
}
上面主要做了:
(1)创建和初始化cif_isp10_device,该结构体中保存着从DTS中解析出来的信息。
(2)注册v4l2_device
(3)注册了4个video_device:
rkisp1_ispdev:ISP设备
rkisp1_selfpath: 图像捕获设备
rkisp1_mainpath: 图像捕获设备,用于高分辨率
rkisp1_dmapath: DMA设备
(4)注册v4l2_subdev, 将v4l2_device和v4l2_subdev关联到一起。
*注意: 应用层就是通过访问video_device生成的节点来进行操作Camera,所以video_device注册时指定了很多ioctl函数。
(3)创建cif_isp10_device
struct cif_isp10_device *cif_isp10_create(
CIF_ISP10_PLTFRM_DEVICE pdev,
void (*sof_event)(struct cif_isp10_device *dev, __u32 frame_sequence),
void (*requeue_bufs)(struct cif_isp10_device *dev,
enum cif_isp10_stream_id stream_id),
struct pltfrm_soc_cfg *soc_cfg)
{
int ret;
struct cif_isp10_device *dev;
cif_isp10_pltfrm_pr_dbg(NULL, "\n");
//分配结构体
dev = kzalloc(sizeof(*dev), GFP_KERNEL);
//......
dev->sof_event = sof_event;
dev->requeue_bufs = requeue_bufs;
ret = cif_isp10_pltfrm_dev_init(dev,
&pdev, &dev->config.base_addr); //平台初始化(重映射寄存器地址,申请中断等)
cif_isp10_pltfrm_soc_init(dev, soc_cfg); //soc相关初始化(ISP,DPHY等时钟初始化)
ret = cif_isp10_img_srcs_init(dev); //初始化图像源,即ISP连接的Camera
ret = cif_isp10_register_isrs(dev); //注册中断处理函数 (ISR, Interrupt Service Routine),
//......
dev->pm_state = CIF_ISP10_PM_STATE_OFF;
dev->sp_stream.state = CIF_ISP10_STATE_DISABLED;
dev->sp_stream.id = CIF_ISP10_STREAM_SP;
dev->mp_stream.state = CIF_ISP10_STATE_DISABLED;
dev->mp_stream.id = CIF_ISP10_STREAM_MP;
dev->dma_stream.state = CIF_ISP10_STATE_DISABLED;
dev->dma_stream.id = CIF_ISP10_STREAM_DMA;
dev->config.mi_config.async_updt = 0;
(void)cif_isp10_init(dev, CIF_ISP10_ALL_STREAMS); //初始化所有的流(SP,MP,DMA)
cif_isp10_pltfrm_event_init(dev->dev, &dev->dma_stream.done);
cif_isp10_pltfrm_event_init(dev->dev, &dev->sp_stream.done);
cif_isp10_pltfrm_event_init(dev->dev, &dev->mp_stream.done);
dev->img_src_exps.exp_valid_frms[VALID_FR_EXP_T_INDEX] = 4;
dev->img_src_exps.exp_valid_frms[VALID_FR_EXP_G_INDEX] = 4;
dev->img_src_exps.inited = false;
mutex_init(&dev->img_src_exps.mutex);
memset(&dev->img_src_exps.data, 0x00, sizeof(dev->img_src_exps.data));
spin_lock_init(&dev->img_src_exps.lock);
INIT_LIST_HEAD(&dev->img_src_exps.list);
dev->vs_wq = alloc_workqueue("cif isp10 vs workqueue",
WQ_UNBOUND | WQ_MEM_RECLAIM, 1);
/* TBD: clean this up */
init_output_formats();
return dev;
//省略异常处理.....
}
上面是主要的初始化,包括dts解析,时钟设置,关联Camera等配置。
主要的几个初始化函数就是上面注释的位置,我们分析一下 cif_isp10_img_srcs_init,它会获取ISP上关联的Camera。
static int cif_isp10_img_srcs_init(
struct cif_isp10_device *dev)
{
int ret = 0;
memset(dev->img_src_array, 0x00, sizeof(dev->img_src_array));
dev->img_src_cnt = cif_isp10_pltfrm_get_img_src_device(dev->dev, //获取ISP上的Camera,最多10个
dev->img_src_array, CIF_ISP10_NUM_INPUTS);
if (dev->img_src_cnt > 0)
return 0;
dev->img_src_cnt = 0;
ret = -EFAULT;
cif_isp10_pltfrm_pr_err(dev->dev,
"failed with error %d\n", ret);
return ret;
}
int cif_isp10_pltfrm_get_img_src_device(
struct device *dev,
struct cif_isp10_img_src **img_src_array,
unsigned int array_len)
{
struct device_node *node = NULL;
struct device_node *camera_list_node = NULL;
struct i2c_client *client = NULL;
int ret = 0;
int index, size = 0;
const __be32 *phandle;
int num_cameras = 0;
struct cif_isp10_device *cif_isp10_dev = dev_get_drvdata(dev);
node = of_node_get(dev->of_node);
//.......
//获取ISP上关联的Camera
phandle = of_get_property(node,
"rockchip,camera-modules-attached", &size);
//.......
for (index = 0; index < size / sizeof(*phandle); index++) {
camera_list_node = of_parse_phandle(node,
"rockchip,camera-modules-attached", index);
of_node_put(node);
//......
//判断是不是I2C subdev,是的话就加入到数组中
if (!strcmp(camera_list_node->type,
"v4l2-i2c-subdev")) {
client = of_find_i2c_device_by_node(
camera_list_node);
//......
} else {
//......
continue;
}
//加到数组中
img_src_array[num_cameras] =
cif_isp10_img_src_to_img_src(
&client->dev,
&(cif_isp10_dev->soc_cfg));
if (!IS_ERR_OR_NULL(img_src_array[num_cameras])) {
cif_isp10_pltfrm_pr_info(dev,
"%s attach to cif isp10 img_src_array[%d]\n",
cif_isp10_img_src_g_name(
img_src_array[num_cameras]),
num_cameras);
num_cameras++;
if (num_cameras >= array_len) {
cif_isp10_pltfrm_pr_err(dev,
"cif isp10 isn't support > %d 'camera modules attached'\n",
array_len);
break;
}
}
}
return num_cameras;
//省略异常处理.....
}
上面就是获取DTS中的如下定义:
&cif_isp0 {
rockchip,camera-modules-attached = <&camera0>;
status = "okay";
};
获取完后保存在数组中,cif_isp10_v4l2_register_imgsrc_subdev函数中会将这些v4l2_subdev和v4l2_device关联。
(4)ioctl
应用层调用ioctl会先调用到v4l2_file_operations中的unlocked_ioctl或compat_ioctl32,然后最终会调用到v4l2_ioctl_ops中的各个ioctl。
所以应用层对Camera的控制主要就是通过ioctl,我们随便找两个看看:
查询V4L2功能
static int v4l2_querycap(struct file *file,
void *priv, struct v4l2_capability *cap)
{
struct vb2_queue *queue = to_vb2_queue(file);
struct video_device *vdev = video_devdata(file);
struct cif_isp10_device *dev = to_cif_isp10_device(queue);
u32 stream_ids = to_stream_id(file); //获取id
strcpy(cap->driver, DRIVER_NAME);
strlcpy(cap->card, vdev->name, sizeof(cap->card));
snprintf(cap->bus_info, sizeof(cap->bus_info),
"platform:" DRIVER_NAME "-%03i",
dev->dev_id);
//根据ID(SP,MP,DMA)返回对应的功能
if (stream_ids == CIF_ISP10_STREAM_SP) {
cap->capabilities = V4L2_CAP_VIDEO_CAPTURE |
V4L2_CAP_STREAMING;
cap->device_caps |= V4L2_CAP_VIDEO_CAPTURE |
V4L2_CAP_STREAMING;
} else if (stream_ids == CIF_ISP10_STREAM_MP) {
cap->capabilities = V4L2_CAP_VIDEO_CAPTURE |
V4L2_CAP_STREAMING;
cap->device_caps |= V4L2_CAP_VIDEO_CAPTURE |
V4L2_CAP_STREAMING;
}
else if (stream_ids == CIF_ISP10_STREAM_DMA)
cap->capabilities = V4L2_CAP_VIDEO_M2M_MPLANE |
V4L2_CAP_VIDEO_M2M;
cap->capabilities |= V4L2_CAP_DEVICE_CAPS;
cap->device_caps |= V4L2_CAP_DEVICE_CAPS;
return 0;
}
这只是某个ioctl的处理函数,在内部还有非常多,我们就不一一举例了。因为ISP和Camera已经关联在一起了,所以ISP中的ioctl会去调用Camera驱动中的ioctl。这也就串联起来了!
建议大家可以去网上找个Camera拍照的应用demo,就会清楚为什么驱动会分析到ioctl了。
2. 打开数据流
static int cif_isp10_v4l2_streamon(
struct file *file,
void *priv,
enum v4l2_buf_type buf_type)
{
//......
//打开buffer, 准备接收数据流
ret = vb2_streamon(queue, buf_type);
//开启Camera数据流。让数据流从Camera流到ISP
ret = cif_isp10_streamon(dev, stream_ids);
if (IS_ERR_VALUE(ret)) {
goto err;
}
return 0;
//......
}
开启队列中的buffer,然后调用Camera中的接口开启数据流,让数据流从Camera流到ISP。
int cif_isp10_streamon(
struct cif_isp10_device *dev,
u32 stream_ids)
{
int ret = 0;
bool streamon_sp = stream_ids & CIF_ISP10_STREAM_SP;
bool streamon_mp = stream_ids & CIF_ISP10_STREAM_MP;
bool streamon_dma = stream_ids & CIF_ISP10_STREAM_DMA;
//......
stream_ids = 0;
if (streamon_mp && dev->mp_stream.updt_cfg)
stream_ids |= CIF_ISP10_STREAM_MP;
if (streamon_sp && dev->sp_stream.updt_cfg)
stream_ids |= CIF_ISP10_STREAM_SP;
ret = cif_isp10_config_cif(dev, stream_ids);
if (IS_ERR_VALUE(ret))
goto err;
//开启数据传输
ret = cif_isp10_start(dev, streamon_sp, streamon_mp);
if (IS_ERR_VALUE(ret))
goto err;
//......
}
static int cif_isp10_start(
struct cif_isp10_device *dev,
bool start_sp,
bool start_mp)
{
if (!CIF_ISP10_INP_IS_DMA(dev->config.input_sel)) {
//调用Camera中的ioctl开启数据流
mutex_lock(&dev->img_src_exps.mutex);
cif_isp10_img_src_ioctl(dev->img_src,
RK_VIDIOC_SENSOR_MODE_DATA,
&dev->img_src_exps.data[0].data);
cif_isp10_img_src_ioctl(dev->img_src,
RK_VIDIOC_SENSOR_MODE_DATA,
&dev->img_src_exps.data[1].data);
dev->img_src_exps.data[0].v_frame_id = 0;
dev->img_src_exps.data[1].v_frame_id = 0;
mutex_unlock(&dev->img_src_exps.mutex);
//.......
}
//.......
return ret;
}
long cif_isp10_img_src_ioctl(
struct cif_isp10_img_src *img_src,
unsigned int cmd,
void *arg)
{
if (!img_src) {
cif_isp10_pltfrm_pr_err(NULL, "img_src is NULL\n");
return -EINVAL;
}
//调用Camera的ioctl
return img_src->ops->ioctl(img_src->img_src, cmd, arg);
}
通过上面的一些列调用关系可以看出,最终调用了Camera的ioctl。这里img_src指的就是sensor。数据就开始从Camera一直流向ISP。
总结
我们分析了ISP驱动的一个大致流程,Camera的很多核心算法不是放在驱动上的,大部分都是放在应用层上面的。所以我们在驱动上看到的更多是一些控制,参数配置等接口。
审核编辑:刘清
-
Linux
+关注
关注
87文章
11287浏览量
209277 -
ISP
+关注
关注
6文章
476浏览量
51793 -
Linux驱动
+关注
关注
0文章
43浏览量
9958 -
RK3399
+关注
关注
2文章
211浏览量
24840
发布评论请先 登录
相关推荐

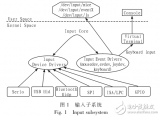
Linux驱动分析之input子系统
Linux内核分析笔记总结
基于Linux内核输入子系统的驱动研究
基于Linux 2.6内核Makefile分析

关于Linux 2.6内核Makefile的分析
linux内核启动流程

基于Linux与Busybox的Reboot命令流程分析
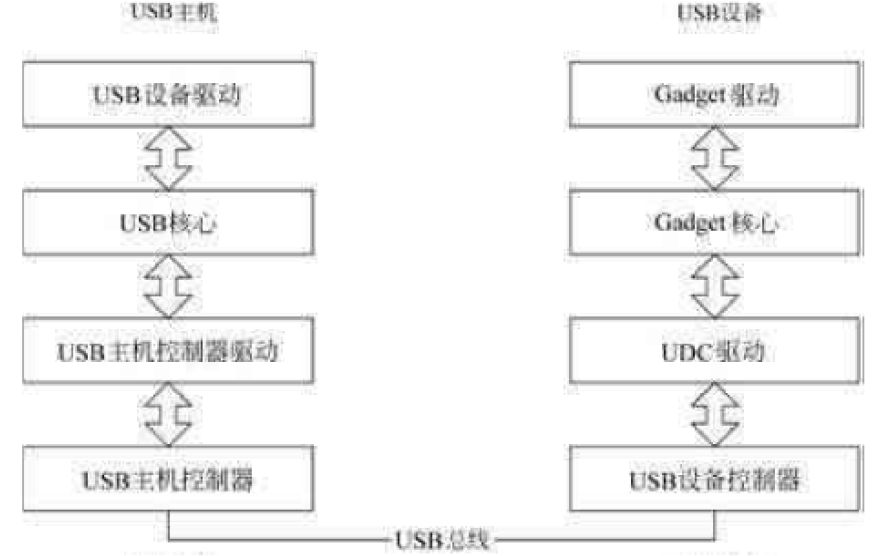
如何使用Linux内核实现USB驱动程序框架





 工商网监
工商网监
评论