 亚信AxRoBot EtherCAT从站机器手臂碰撞防护功能
亚信AxRoBot EtherCAT从站机器手臂碰撞防护功能
介绍亚信电子AX58200 AxRobot EtherCAT从站七轴助力控制机器手臂解决方案的线上碰撞防护功能。
AX58200 AxRobot机器手臂解决方案,利用亚信AX58200 EtherCAT从站马达驱动关节模块化设计,有效地减少每个机器手臂关节中马达驱动板所需占用的空间大小,降低机器手臂关节硬件设计成本。另外,使用EtherCAT菊花链(Daisy-Chain)拓扑连接技术,进行机器手臂关节间的网络通信,可以简单地使用网络线从第一轴关节一直串接到第七轴关节,大大地简化机器手臂关节中内部线路配置的复杂度,从而降低机器手臂设备维护的成本与难度。
一般协作型机器手臂透过装置力量传感器,来获取外界接触力量的资讯,进而实现智能工厂自动化所需的人机协作功能。AxRobot助力控制机器手臂解决方案,无需额外安装价格昂贵的力量传感器,透过内置的马达助力控制器功能,即可侦测外部突发碰撞事件,紧急停止机器手臂的运作并发出错误警报信息,以确保在人与机器协作过程中操作人员的安全。
亚信电子可提供AxRobot EtherCAT七轴助力控制机器手臂开发套件,方便客户进行AxRobot七轴助力控制机器手臂软件控制功能评估。另外,亚信电子可依据客户产品设计的需求,提供AxRobot EtherCAT七轴助力控制机器手臂的开发设计服务。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
亚信电子
+关注
关注
0文章
26浏览量
10651 -
自动化
+关注
关注
29文章
5654浏览量
79801 -
机器手臂
+关注
关注
1文章
18浏览量
11609
发布评论请先 登录
相关推荐
三格电子-EtherCAT从站转ModbusTCP主站/从站网关
EtherCAT从站转ModbusTCP主站/从站网关 型号:SG-ECAT_S-TCP 本产品是
亚信电子IAS 2024上海工业自动化展精彩回顾
EtherCAT转IO-Link网关,以及AX58x00 EtherCAT从站马达运动控制等。另外,现场也静态展示可适用于机器
亚信电子于IAS 2024展出最新IO-Link主站&设备软件协议栈解决方案
亚信电子即将于IAS 2024展示最新的亚信IO-Link主站/设备软件协议栈、集成亚

DeviceNet主站转EtherCAT从站协议网关(JM-ECT-DNTM)
往往采用DeviceNet进行通讯,当需要将DeviceNet协议的从站组件接入EtherCAT主控系统时,通过DeviceNet主站转EtherC

EtherCAT主站转Modbus TCP从站协议网关(JM-ECTM-TCP)
交互。 应用广泛:支持EtherCAT接口的马达、机械手臂、IO模块、电机等等。EtherCAT主站转Modbus TCP从

EtherCAT从站转Profinet主站协议网关(JM-PNM-ECT)
一,产品主要功能 1、 捷米特JM-PNM-ECT 型网关实现Profinet控制器和EtherCAT从站设备之间的数据通信,连接到Profinet(RT和IRT)网络。支持

EtherCAT从站转Profinet主站总线协议转换网关(JM-PNM-ECT)
大家详尽阐述该设备的功能、参数以及具体的配置方式。 一,产品主要功能 1、捷米特JM-PNM-ECT型网关实现Profinet控制器和EtherCAT从

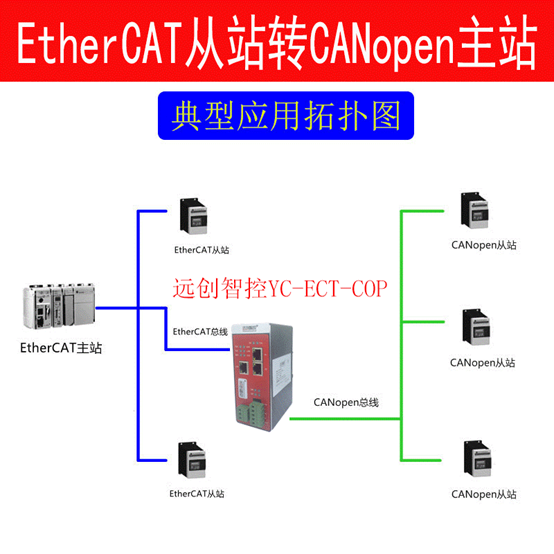
EtherCAT从站转CANopen主站协议网关(JM-ECT-COP)
的驱动器可能采用CANopen协议进行控制和反馈,而整个机器人的控制系统基于EtherCAT网络。EtherCAT从站转CANopen主
EtherCAT从站转EtherNet/IP从站协议网关(JM-EIP-ECAT)
EtherNet/IP设备连接到EtherCAT网络。 广泛应用:在工业自动化领域,不同设备和系统可能采用不同的通信协议。EtherCAT从站转EtherNet/IP

EtherCAT从站转CANopen主站总线协议转换网关
给各位全面且详尽地阐述该设备的功能、参数以及配置的方法。 一,产品主要功能 远创智控YC-ECT-COP是自主研发的一款EtherCAT从站
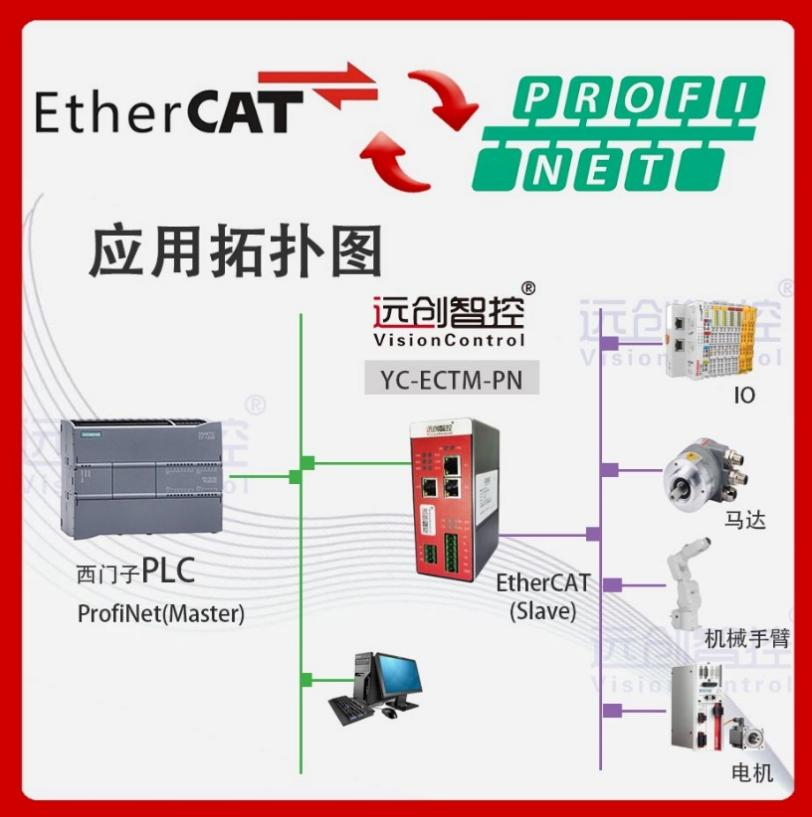
EtherCAT主站转Profinet从总线协议转换网关
产品功能 1.远创智控YC-ECTM-PN型网关是Porfinet从转EtherCAT主工业级Porfinet网关。这种网关设备允许将Porfinet网络中的设备连接到EtherCAT

基于全志T507-H的Igh EtherCAT主站案例分享
Linux用户层运行的命令,可直接实现对从站的访问和设置,如设置从站地址、显示总线配置、显示PDO数据、读写SDO参数等。
案例说明
案例功能
发表于 06-03 09:59
XMC4800硬件能否同时管理EtherCAT从站和PMSM FOC?
我正在设计一个新应用,XMC4800 作为 EtherCAT 从站与 PMSM FOC 一起使用。
我从 XMC4800 的 EtherCAT
发表于 05-27 06:39
EtherCAT总线如何对从站固件进行升级?
EtherCATFOE是一种主站对从站设备固件升级的技术,通过利用EtherCAT的数据链路层来处理数据实现文件传输,可以确保文件传输的完整性和准确性,为设备的维护、升级、监控和管理提






 工商网监
工商网监
评论