 一些实用的布局、提示和技巧
一些实用的布局、提示和技巧
本文将为初学者提供一些实用的布局、提示和技巧,可以帮助您避免事故或解决各种问题。该系列将不定期发布。
1.最简单的短路/过流保护。
我曾在《Elektronika dla Wszystkich》中读到,每一个受保险丝保护的晶体管都会通过熔断保险丝来保护它。然而,有时,如果有一个带有晶体管的执行电路,在电流过大的情况下任何一个器件都不会被损坏,就更好了,特别是如果我们不知道多大的电流可以流过系统时。
RCC中经常使用以下解决方案来限制初级绕组电流:
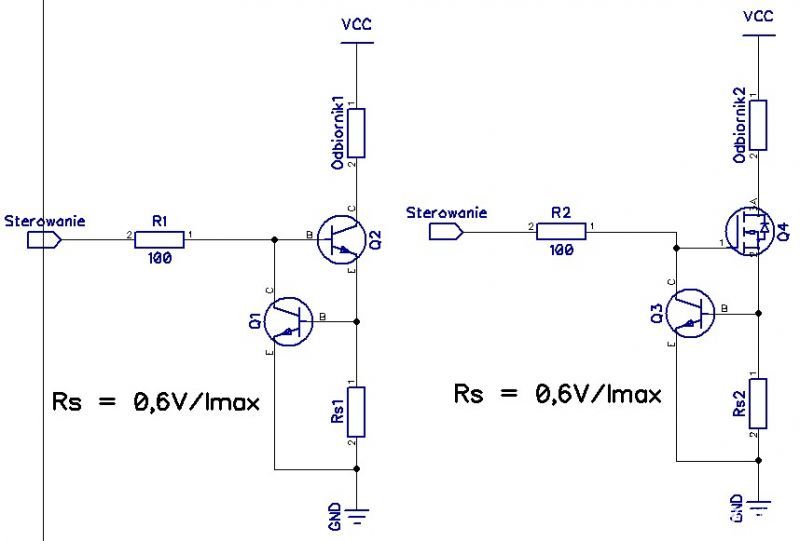
上图是一个带有 NPN 和 MOSFET-N 执行晶体管的基本电路。两种系统的工作方式相同——当 Rs1/Rs2 电阻两端的电压超过 0.6V 时,Q1/Q3 晶体管将开始导通,在 Q2的基极或Q4的栅极的基础上降低电压。
该电压降限制了流向 Rs1 / Rs2 的电流。只要 Q2 / Q4 在安全工作区 (SOA) 内,该电路将在任何 VCC 电压和任何负载阻抗下工作。人们还应该记住执行晶体管和电阻器 Rs1 / Rs2 上的损耗功率。
2.快速直流电机“刹车”。
直流电动机的一个有趣且有时有用的特性:它们可以用作发电机。发电机的一个重要特性是,发电机的电力负载越多,它产生的机械阻力就越大。这种现象可用于将电机停止在几乎适当的位置,在关闭电源后,足以使电机端子彼此闭合。在机电设备中,为此目的使用了限位开关。如果电机连接到 H 桥,则打开两个上晶体管或两个下晶体管就足够了。但是,如果电机由一个晶体管控制,您可以构建这样一个系统:
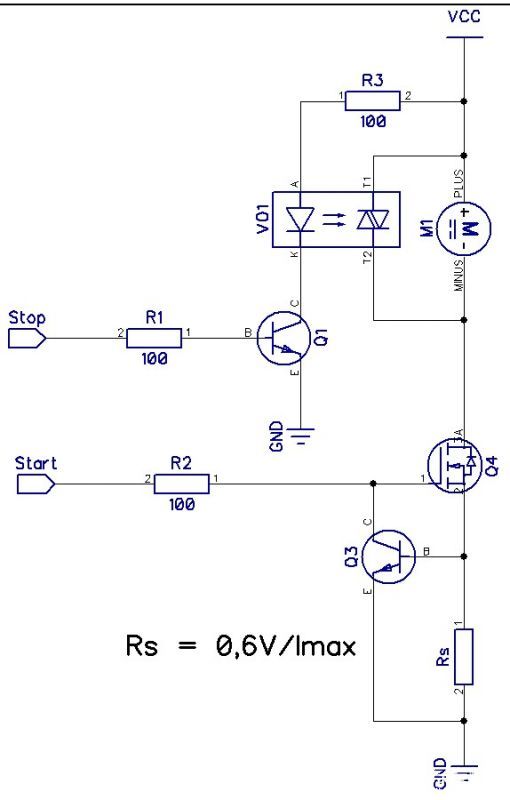
该电路考虑了上述建议中电机的电流限制。与电机并联的光电三端双向可控硅开关 VO1 带有一个额外的电阻器和控制停止功能的晶体管。当我们想要停止电机时,我们在 Start 输入上将状态设置为低电平,然后在 stop 输入上设置为高电平状态。Optotriac 将通过短接电机开始导通。即使在停止输入关闭后,只要通过可控硅的电流不低于光可控硅锁存电流 (Ift),光可控硅的导通状态就会继续。在该系统中,启动和停止输入同时处于高电平状态是不可接受的——它可能会损坏光可控硅,并且发动机不会旋转。布局可以简化一点:
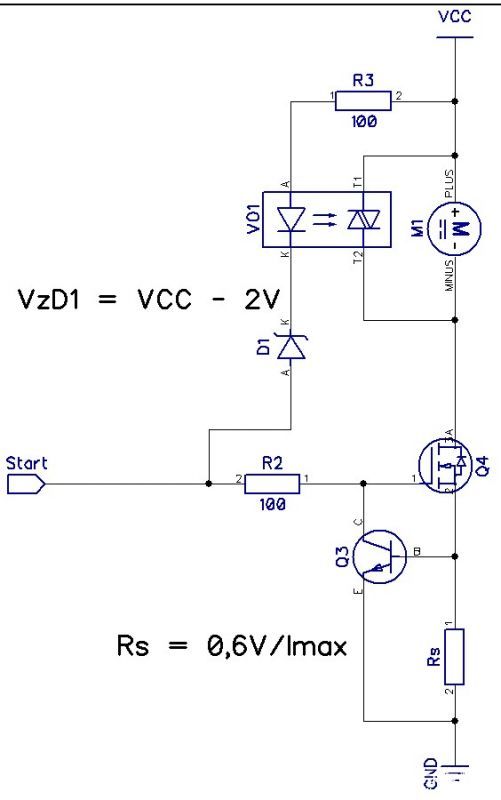
在这里,我们使用齐纳二极管 D1,而不是额外的控制输入和随附的晶体管和电阻器。齐纳电压应等于电源电压减去控制电机的电压。当输入为高电平时,阳极和阴极 D1 之间的电压将太低,二极管无法开始导通,光电三端双向可控硅开关将不导通。当我们将输入端设置为低电平(通常为0V)时,稳压二极管将开始导通,因此光电二极管也会亮起。只要输入端的电压不超过 2V - 二极管导通电压 Vf 的值,这种状态就会持续。对于典型的 Vf 值,其将是 0.5-0.85V。当电机主动制动时,该系统还有另一个优点,因为一旦超过支持电流(Ih),光电双向可控硅开关就会开始导通。当然,在以前的系统中,当 Stop 输入状态为高时,可以进行主动制动。通常,保持电流明显低于锁存电流。对于 MOC3023 光可控硅,If最大为 5mA,Ih 仅为 250µA。
上述带有光可控硅的解决方案仅适用于较小的电机,因为如果电机短路电流过高,它们将被损坏!
对于更高的功率,您可以添加一个三端双向可控硅开关根据 下图:
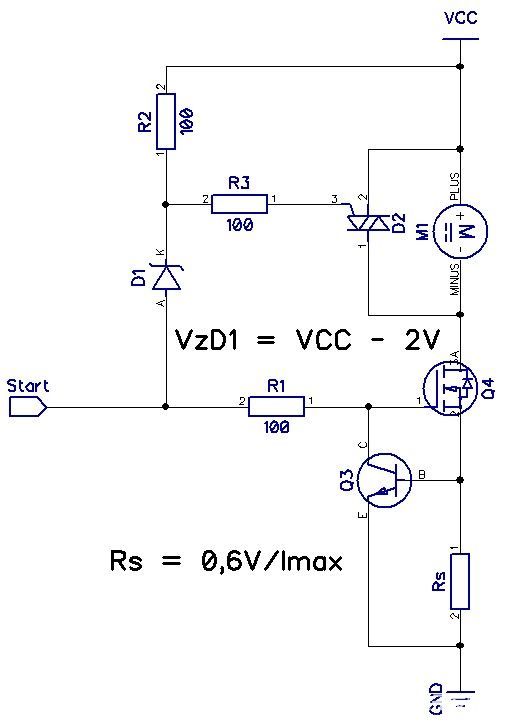
光三端双向可控硅开关已被三端双向可控硅开关取代。当输入为高电平时,D1 二极管不导通,R2 上的电流太低,不足以使三端双向可控硅开关在其上沉积。当输入为低电平时,二极管将导通,并且将向电阻器施加足够的电压以触发三端双向可控硅开关。同时,电阻 R3 将限制双向可控硅栅极电流。在这种配置中,三端双向可控硅开关可以更大,使其能够与更大的电机和更高的短路电流一起工作。
3. 不用的运放怎么办?
有时,必须使用具有比我们需要的更多运算放大器的电路。
在这种情况下,慢速放大器不应该只是“挂”在自己身上,因为它不仅会消耗电力,而且还可能开始激发并产生不必要的干扰和噪声。
为什么?因为没有反馈限制的运算放大器的增益很高。
对于相当流行的芯片,TL07x 超过 100dB,也就是 200,000 倍。这些失真、噪声和激励不仅会穿透相邻的放大器,而且放大器会消耗能量并不必要地发热。未使用的放大器端接不当可能会导致其饱和并消耗最大电流,从而导致系统发热,从而使使用中的放大器参数变差。
所以,你可以做什么?
如果我们有一个具有高增益的放大级,我们可以将其转换为具有较低增益的两个级,因此我们将使用额外的放大器并改善频率响应。
如果我们在一个系统中构建三个放大器,其中四合一装有一个仪器放大器那么第四个放大器可以作为一个额外的缓冲器。
让我们假设我们不想这样做,因为自噪声、输入电压和电流不平衡等。然后呢?
以下是单电压和对称电压放大器的解决方案:
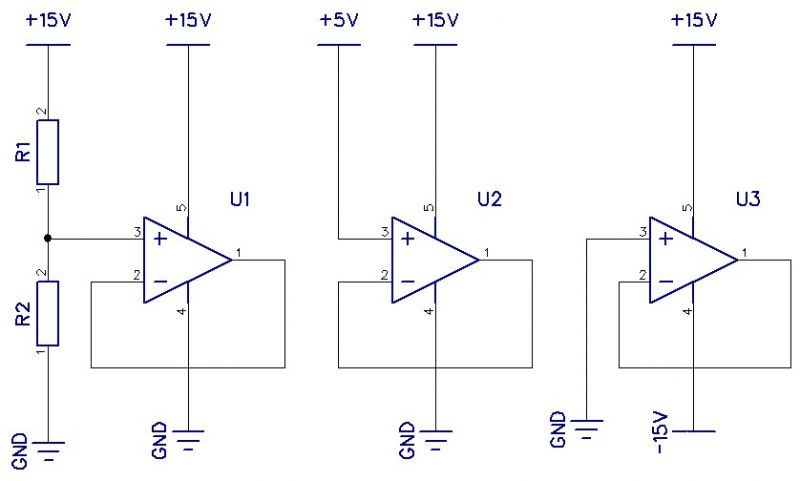
在具有单电源电压的配置中,R1 和 R2 电阻器应在 1kΩ 至 470kΩ 的范围内具有相同的值。较低的值适用于具有较高偏置电流的双极输入的放大器,较高的适用于具有 JFET 和 CMOS 输入的放大器。如果我们不想放置额外的电阻,我们可以将同相输入连接到安全输入电压范围内的电压源。在对称配置中,将未使用放大器的非反相输入连接到地就足够了。
4.硬件消除接触振动。
接触振动很容易通过软件消除,有朝一日我会举一些例子。然而,今天我想向您展示三个解决方案,其中第一个有缺陷但最流行,第三个是不必要的复杂。这是一个实物图:
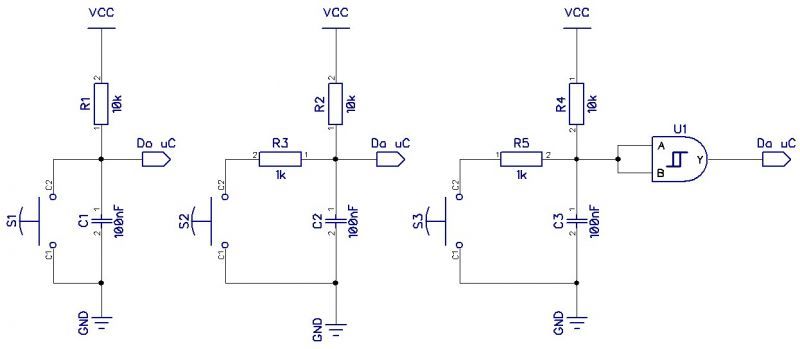
左边的电路是最流行的解决方案,其中电阻器为电容器充电,按钮将其放电至零。这种解决方案非常有效,但它有一个小缺点:短路电流将流过触点,仅受其电阻和寄生电阻的限制。每次按压都意味着电流浪涌和触点的缓慢退化。第二种解决方案完全消除了这个问题,同时增加了比接触振动时间更长的延迟。由于 R2 和 R3 构成分压器,微控制器输入端的电压约为电源电压的 10%。变体三添加了一个带有施密特输入的与门作为附加缓冲器。因此,只要电容器上的电压降至输入状态变化阈值以下,输出就会改变其状态。目前没有必要,因为大多数微控制器都有施密特门输入。还有一点需要注意的是:并不总是需要在 plus 上安装上拉电阻,因为许多微控制器至少有几个输入带有内置上拉电阻,可以通过软件打开。元素的取值要根据你自己的需要。
-
微控制器
+关注
关注
48文章
7708浏览量
152567 -
晶体管
+关注
关注
77文章
9829浏览量
139396 -
电源电压
+关注
关注
2文章
993浏览量
24249 -
直流电动机
+关注
关注
7文章
196浏览量
23048
发布评论请先 登录
相关推荐
多轨电源设计的布局提示和技巧
分享一些有关去耦电容选择和旁路电容布局考虑的一些看法
分享一些有关去耦电容选择和旁路电容布局考虑的一些看法

你知道开关电源布局以及印制板布线的一些原则吗

使用PyCharm时的一些实用设置和技巧
PCB布局的一些思路


一些lay板布局的小技巧





 工商网监
工商网监
评论