 构建一个手套控制机械手臂
构建一个手套控制机械手臂
该项目使用预算项目和 DIY 零件来创建一个功能齐全的机器人手,可以通过带有柔性传感器的手套进行控制。这是一个介绍生物力学工程和设计世界的项目。从泡沫和绳子的基本构建块开始,您将探索物理力学如何与电子部件相结合,形成一个引人注目的项目。
设计
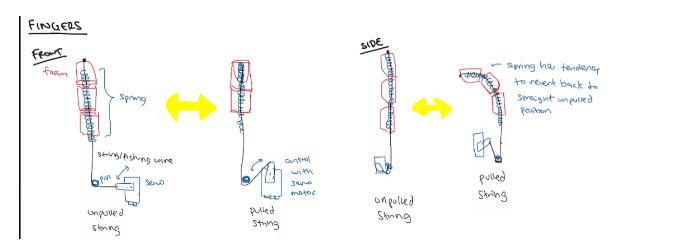
下图是机械手和手套控制器如何工作的基本图纸。这些图片对最终产品并不准确,但提供了项目背后机制的基础和解释。
手工
首先,用泡沫、弹簧、胶带和绳子制作手指。每个手指由三个泡沫底座(两个用于拇指)和一个嵌入其中心的弹簧组成。绳子被热粘在顶部泡沫件上,并在泡沫件内向下引导。最后,胶带用于保护和覆盖泡沫。我建议不要像我那样使用绝缘泡沫,因为它很难切割。
从手指根部下方伸出一部分弹簧非常重要。起初我所有的手指都没有这个,之后我将另一个弹簧焊接到底部以增加长度。另一种方法是使用牙签作为底座,但这样您的手就无法在手掌上弯曲。
接下来构建手掌和手臂底座。我没有太多关于这个过程的文档,但这比较简单。对于我的手,我雕刻了一个手掌状的形状来握住我所有的手指。在手掌顶部创建孔以固定手指手臂底座至少将 5 个伺服器和一个 Arduino Uno 固定在一起。我的项目尺寸为 8x2.5x.5 英寸。确保琴弦能够从底座上拉出。使用手掌上的订书钉作为支架将琴弦引导至伺服电机。创建凹痕并粘合伺服电机。
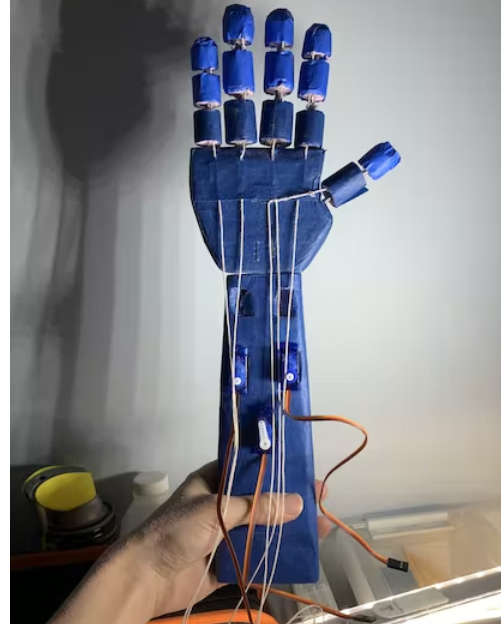
将琴弦穿过伺服电机臂,并在拉紧时将其热粘。将 Arduino Uno 安装到手臂底部,并将面包板连接到背面。用橡皮筋/束线带整理电线,并将所有伺服电机连接到面包板上的电源导轨。最后,将伺服电机上的信号线连接到 Arduino 板上的数字引脚。使用 4AA 电池组仅为伺服电机供电。手的接线和构造现在已经完成。现在可以对 Arduino Uno 进行编程以控制伺服电机。

手套结构
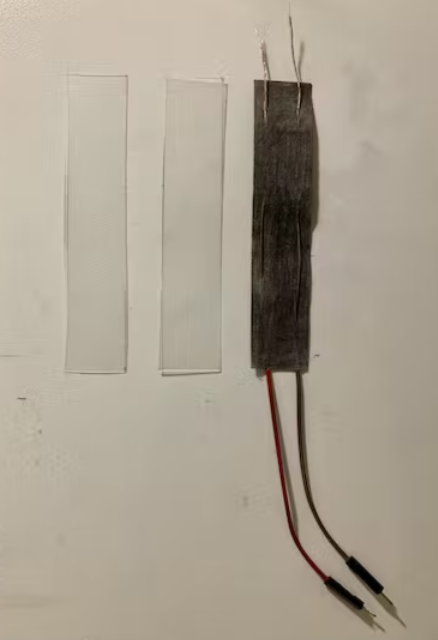
手套控制器最重要的部分是弯曲传感器。与其花 100 美元购买 5 个传感器,不如自己动手做。这是需要使用纸和铅笔、柔性塑料和胶带的地方。
接下来,将传感器粘在备用手套上。

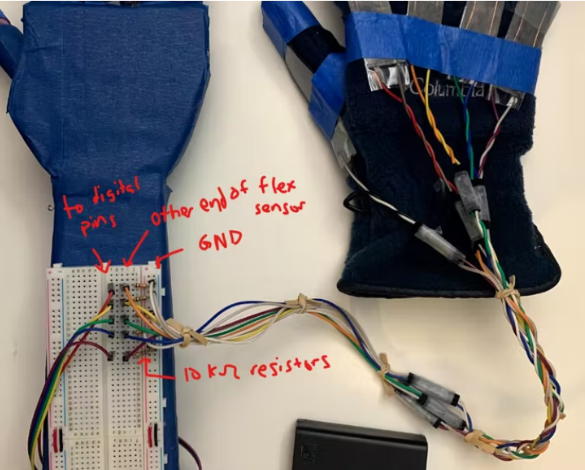
保持井井有条的布线很重要,因为有很多跳线。至少有 10 根电线需要连接到面包板上。将电线扭在一起,以防止它们到处蔓延。根据下图连接柔性传感器。我使用了 5 个 10kOhm 电阻器,但也可以使用其他选项。请注意,此电源轨直接从 Arduino 引脚接收电源,而不是 6V 电池组。
编码
在提供的编码部分,重要的是要意识到参数会因每个柔性传感器和伺服电机而异。为了清楚地组织值,我包含了 flexTest() 函数来测试 flex 传感器的值。
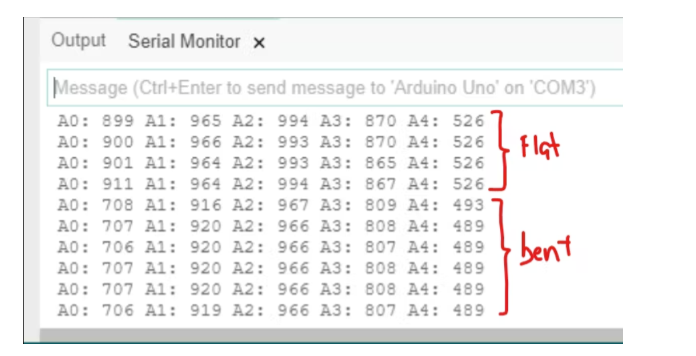
对于伺服电机参数,我用伺服电机测试了每个手指的完全弯曲并减少了旋转量,以确保手指彼此不会过度重叠。
测试程序并根据需要更改参数,以便使用手套获得最佳控制。到这一步,项目就完成了!
结论
最终这个项目工作正常,但它没有我想象中的那么精致,不过考虑到大部分都是手工制作的,也确实可以完成它的工作。3D 打印或购买柔性传感器等替代选项可能会改善体验,但如此一来成本会很高。
扩展
该项目的扩展可能包括使用 EMG 传感器进行肌肉控制。使手套控制器无线化是可能的。功能性手腕和肘部运动也将是一个挑战。
-
控制器
+关注
关注
112文章
16361浏览量
178039 -
机器人手
+关注
关注
0文章
4浏览量
2609 -
柔性传感器
+关注
关注
1文章
86浏览量
3902
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论