 张正友标定算法是什么意思
张正友标定算法是什么意思

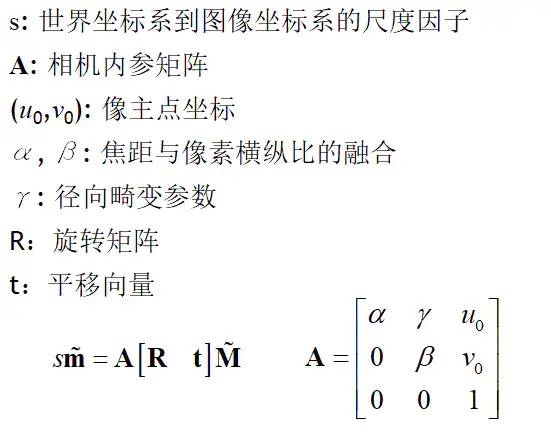
”张正友标定”是指张正友教授1998年提出的单平面棋盘格的摄像机标定方法。文中提出的方法介于传统标定法和自标定法之间,但克服了传统标定法需要的高精度标定物的缺点,而仅需使用一个打印出来的棋盘格就可以。同时也相对于自标定而言,提高了精度,便于操作。因此张氏标定法被广泛应用于计算机视觉方面。
原理
1.计算外参
设三维世界坐标的点为M=[X,Y,Z,1]T,二维相机平面像素坐标为m=[u,v,1]T,所以标定用的棋盘格平面到图像平面的单应性关系为:sm=A[R,t]M
其中
不妨设棋盘格位于Z = 0,定义旋转矩阵R的第i列为 ri, 则有:
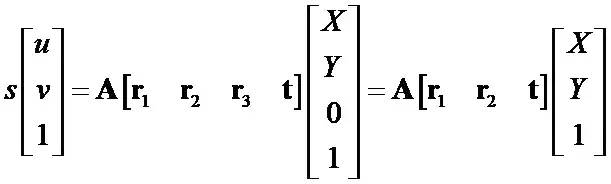
令H=[h1 h2 h3]=λA[r1 r2 t]
于是空间到图像的映射可改为:sm=HM,
其中H是描述Homographic矩阵,H是一个齐次矩阵,所以有8个未知数,至少需要8个方程,每对对应点能提供两个方程,所以至少需要四个对应点,就可以算出世界平面到图像平面的单应性矩阵H
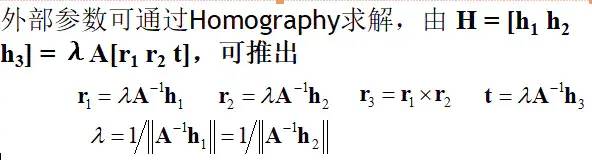
外参具体计算公式。注意:R3是 t
一般而言,求解出的R = [r1 r2 t] 不会满足正交与归一的标准
在实际操作中,R 可以通过SVD分解实现规范化(详见原文)
2.计算内参
由r1和r2正交,且r1和r2的模相等,可以得到如下约束:
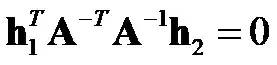
正交

模相等
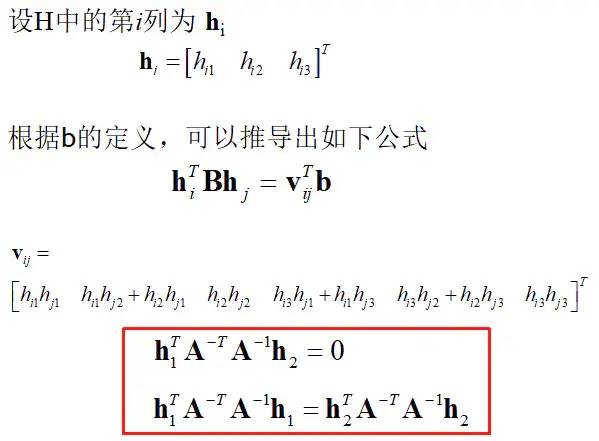
可以推到出
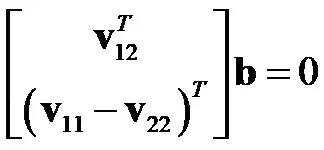
根据推到的结果可知如果有n组观察图像,则V 是 2n x 6 的矩阵
根据最小二乘定义,V b = 0 的解是 VTV 最小特征值对应的特征向量。
因此, 可以直接估算出 b,后续可以通过b求解内参
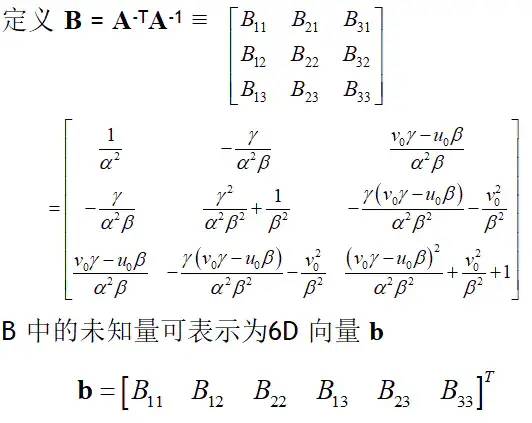
因为B中的未知量为6个,
所以当观测平面 n ≥ 3 时,可以得到b的唯一解
当 n = 2时, 一般可令畸变参数γ = 0
当 n = 1时, 仅能估算出α 与 β, 此时一般可假定像主点坐标 u0 与 v0 为0
内部参数可通过如下公式计算(cholesky分解):
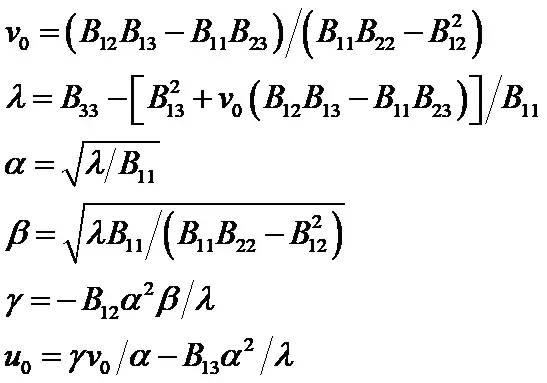
内参具体计算公式
3.最大似然估计
上述的推导结果是基于理想情况下的解,但由于可能存在高斯噪声,所以使用最大似然估计进行优化。设我们采集了n副包含棋盘格的图像进行定标,每个图像里有棋盘格角点m个。令第i副图像上的角点Mj在上述计算得到的摄像机矩阵下图像上的投影点为:

这里的K为相机内参矩阵A
其中Ri和ti是第i副图对应的旋转矩阵和平移向量,K是内参数矩阵。则角点mij的概率密度函数为:
这里的K为相机内参矩阵A
构造似然函数:

这里的K为相机内参矩阵A
让L取得最大值,即让下面式子最小。这里使用的是多参数非线性系统优化问题的Levenberg-Marquardt算法[2]进行迭代求最优解。
这里的K为相机内参矩阵A
4.径向畸变估计
张氏标定法只关注了影响最大的径向畸变。则数学表达式为:

其中,(u,v)是理想无畸变的像素坐标,(u,v)(u,v)是实际畸变后的像素坐标。(u0,v0)代表主点,(x,y)是理想无畸变的连续图像坐标,(x,y)(x,y)是实际畸变后的连续图像坐标。k1和k2为前两阶的畸变参数。
化作矩阵形式:

记做:Dk=d
则可得:

计算得到畸变系数k。
使用最大似然的思想优化得到的结果,即像上一步一样,LM法计算下列函数值最小的参数值:

这里的K为相机内参矩阵A
到此,张氏标定法介绍完毕。我们也得到了相机内参、外参和畸变系数。
相机标定步骤
打印一张棋盘格A4纸张(黑白间距已知),并贴在一个平板上
针对棋盘格拍摄若干张图片(一般10-20张)
在图片中检测特征点(Harris特征)
利用解析解估算方法计算出5个内部参数,以及6个外部参数
根据极大似然估计策略,设计优化目标并实现参数的refinement。
审核编辑:刘清
-
摄像机
+关注
关注
3文章
1810浏览量
63322 -
计算机视觉
+关注
关注
9文章
1716浏览量
47755 -
SVD
+关注
关注
0文章
21浏览量
12499
原文标题:张正友标定算法原理详解
文章出处:【微信号:机器视觉沙龙,微信公众号:机器视觉沙龙】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
RK3576 MIPI Camera ISP调试:客观标定与环境准备(上)
行星齿轮减速机非标定制如何把控精度?

电驱动系统标定全流程指南:从生产扭矩秩序、基础参数,到 MTPA与弱磁、诊断架构与模型化标定闭环

福禄克柔性化压力传感器生产标定系统产品简介

TGS2602 空气中如何标定?

ECU刷写前的“隐藏关卡”:3分钟看懂XCP/CCP标定

CANape标定窗口被锁无法标定

TCORDIC算法实现正余弦函数
IMU+多相机高速联合自动标定方案
什么是传感器标定?传感器标定真的如此重要吗?
GraniStudio:相机标定例程

不确定度评估新实践:传感器标定中的置信概率与误差传递法则
双电机驱动超大倾角胶带输送机的控制算法
FPGA使用Cordic算法求解角度正余弦值

非标定制超声波清洗设备的核心技术解析与应用




评论