 使用MathWorks为CAN实现一个分布式电子控制单元 (ECU) 网络
使用MathWorks为CAN实现一个分布式电子控制单元 (ECU) 网络
此示例在 Simulink 下使用 Vehicle Network Toolbox 为汽车上的 CAN 实现一个分布式电子控制单元 (ECU) 网络。使用的 CAN 报文在 CAN 数据库文件canConnectivityForVehicle.dbc中定义。 Vehicle Network Toolbox 提供了 Simulink 模块,用于通过 Simulink 模型在控制器局域网 (CAN) 上传输和接收实时报文。此示例使用 CAN Configuration、CAN Pack、CAN Transmit、CAN Receive 和 CAN Unpack 模块来执行 CAN 总线上的数据传输。
此示例使用了 MathWorks 虚拟 CAN 通道。但是,您可以将模型连接到其他支持的硬件。
模型说明
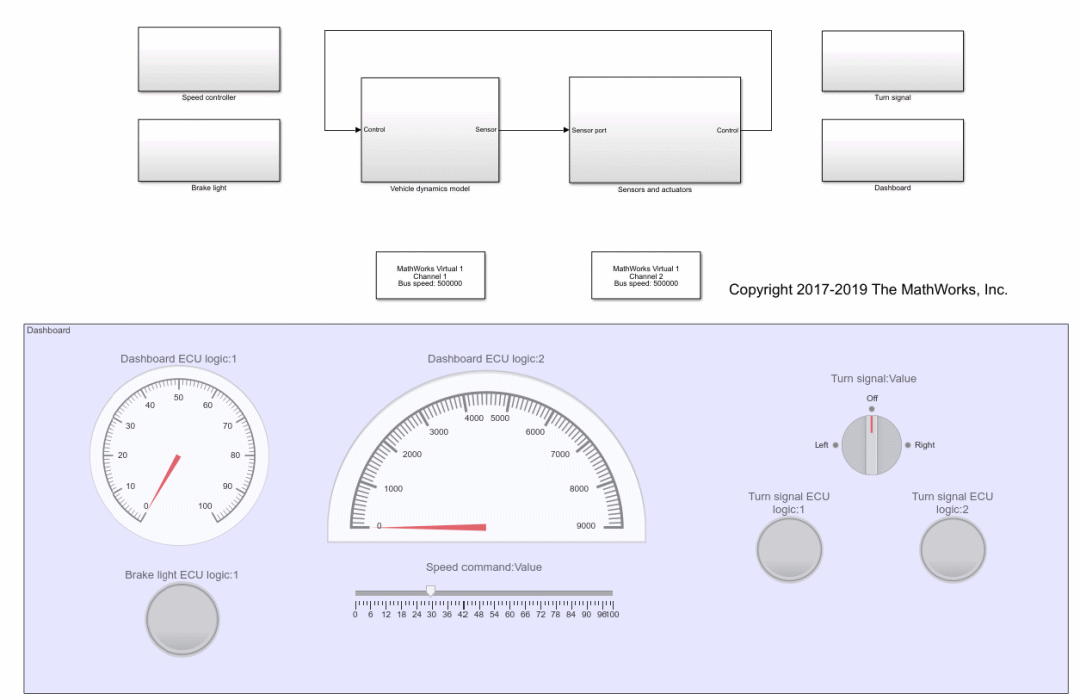
该模型由以下子系统组成:车辆动力学模型、传感器和作动器、转向信号、控制板、刹车灯和速度控制器。车辆动力学模型代表汽车(环境),其他子系统代表 CAN 总线上的各种节点。
车辆动力学模型
该子系统定义汽车的运动方程。输入是节气门体和制动踏板两个作动器的位置。输出是引擎 RPM 和车速,它们经过多路复用处理为单个信号。
传感器和作动器
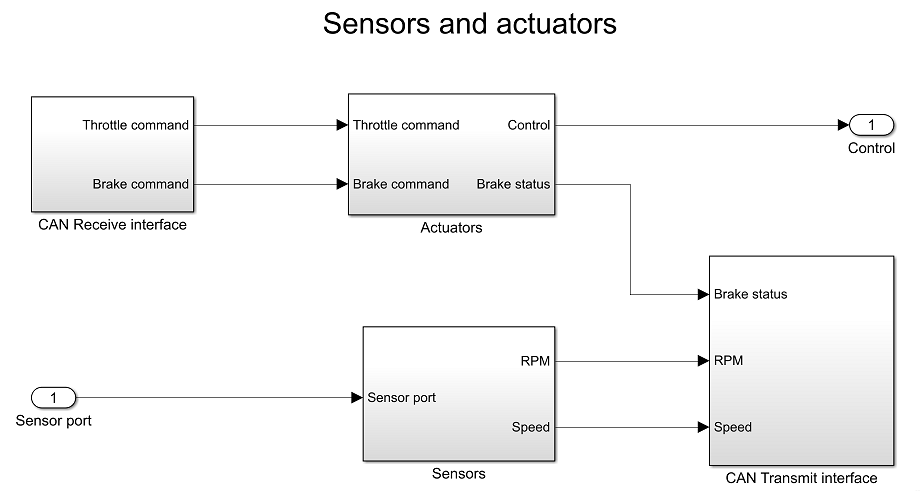
该子系统包含节气门体和制动作动器以及 RPM 和车速传感器。作动器通过 CAN 总线接收节气门和刹车命令。作动器输出(控制)馈送到车辆动力学模型。 制动作动器还发送一个信号,通知是否执行了刹车。该信号以 100 Hz 采样并传输到 CAN 总线。来自车辆动力学模型的引擎 RPM 和车速信号输入到该子系统,并且还以 100Hz 采样并传输到 CAN 总线。
控制板
控制板是车辆和驾驶员之间的接口。用户可以使用滑块设置所需的速度 (Speed command:Value)。可以使用旋转开关操作转向信号 (Turn signal:Value)。 速度命令和转向信号状态信号传输到 CAN 总线。从 CAN 总线读取采样的车速和引擎 RPM,并将其分别显示在车速表和转速表上。
速度控制器
速度控制器向作动器发送命令以将车速驱动到要求的值。从 CAN 总线读取车速和所需的速度。节气门和刹车命令由对应的离散比例积分控制器计算。作动器命令传输到 CAN 总线。
刹车灯
刹车灯子系统从 CAN 总线接收制动作动器状态信号并相应地操作刹车灯。只要刹车启动,刹车灯就会亮起。
转向信号
转向信号子系统从 CAN 总线接收转向信号状态报文并相应地激活转向信号。当旋转开关设置为“左侧位置”时,左转向信号灯周期性闪烁,当旋转开关设置为“右侧位置”时,右转向信号灯周期性闪烁。
审核编辑:刘清
-
传感器
+关注
关注
2553文章
51511浏览量
757256 -
CAN总线
+关注
关注
145文章
1958浏览量
131186 -
ecu
+关注
关注
14文章
893浏览量
54818 -
Simulink
+关注
关注
22文章
536浏览量
62773
原文标题:如何使用Simulink实现一个分布式电子控制单元 (ECU) 网络
文章出处:【微信号:智能汽车电子与软件,微信公众号:智能汽车电子与软件】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

基于ptp的分布式系统设计

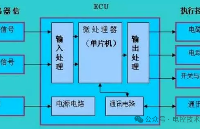
汽车电子控制单元(ECU)简明指南
分布式通信的原理和实现高效分布式通信背后的技术NVLink的演进
分布式输电线路故障定位中的分布式是指什么

电子控制单元(ecu)的作用有哪些?它是如何工作的?
如何实现EtherCAT分布式供电?

Redis实现分布式多规则限流的方式介绍






 工商网监
工商网监
评论