 一文简析OpenCV中的直线拟合方法
一文简析OpenCV中的直线拟合方法

直线拟合原理
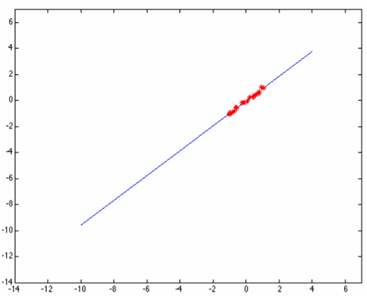
给出多个点,然后根据这些点拟合出一条直线,这个最常见的算法是多约束方程的最小二乘拟合,如下图所示:
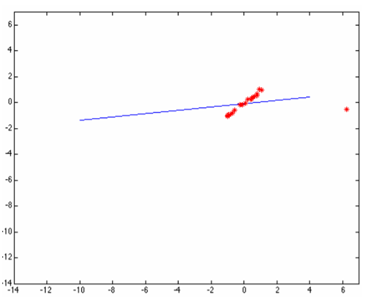
但是当这些点当中有一个或者几个离群点(outlier)时候,最小二乘拟合出来的直线就直接翻车成这样了:
原因是最小二乘无法在估算拟合的时候剔除或者降低离群点的影响,于是一个聪明的家伙出现了,提出了基于权重的最小二乘拟合估算方法,这样就避免了翻车。根据高斯分布,离群点权重应该尽可能的小,这样就可以降低它的影响,OpenCV中的直线拟合就是就权重最小二乘完成的,在生成权重时候OpenCV支持几种不同的距离计算方法,分别如下:
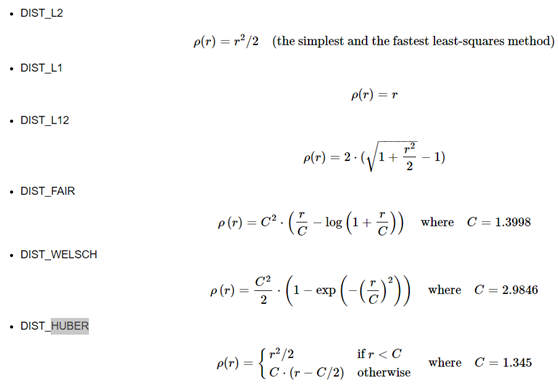
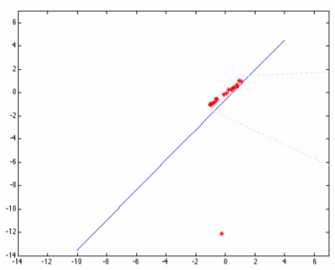
其中DIST_L2是最原始的最小二乘,最容易翻车的一种拟合方式,虽然速度快点。然后用基于权重的最小二乘估算拟合结果如下:
函数与实现源码分析
OpenCV中直线拟合函数支持上述六种距离计算方式,函数与参数解释如下:
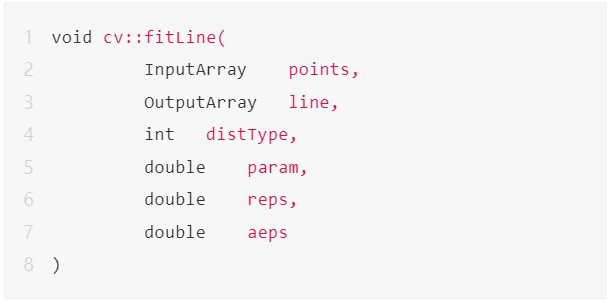
points是输入点集合
line是输出的拟合参数,支持2D与3D
distType是选择距离计算方式
param 是某些距离计算时生成权重需要的参数
reps 是前后两次原点到直线的距离差值,可以看成拟合精度高低
aeps是前后两次角度差值,表示的是拟合精度
六种权重的计算更新实现如下:
staticvoidweightL1(float*d,intcount,float*w)
{
inti;
for(i=0;i< count; i++ )
{
double t = fabs( (double) d[i] );
w[i] = (float)(1. / MAX(t, eps));
}
}
static void weightL12( float *d, int count, float *w )
{
int i;
for( i = 0; i < count; i++ )
{
w[i] = 1.0f / (float) std::sqrt( 1 + (double) (d[i] * d[i] * 0.5) );
}
}
static void weightHuber( float *d, int count, float *w, float _c )
{
int i;
const float c = _c <= 0 ? 1.345f : _c;
for( i = 0; i < count; i++ )
{
if( d[i] < c )
w[i] = 1.0f;
else
w[i] = c/d[i];
}
}
static void weightFair( float *d, int count, float *w, float _c )
{
int i;
const float c = _c == 0 ? 1 / 1.3998f : 1 / _c;
for( i = 0; i < count; i++ )
{
w[i] = 1 / (1 + d[i] * c);
}
}
static void weightWelsch( float *d, int count, float *w, float _c )
{
int i;
const float c = _c == 0 ? 1 / 2.9846f : 1 / _c;
for( i = 0; i < count; i++ )
{
w[i] = (float) std::exp( -d[i] * d[i] * c * c );
}
}
拟合计算的代码实现:
staticvoidfitLine2D_wods(constPoint2f*points,intcount,float*weights,float*line)
{
CV_Assert(count>0);
doublex=0,y=0,x2=0,y2=0,xy=0,w=0;
doubledx2,dy2,dxy;
inti;
floatt;
//Calculatingtheaverageofxandy...
if(weights==0)
{
for(i=0;i< count; i += 1 )
{
x += points[i].x;
y += points[i].y;
x2 += points[i].x * points[i].x;
y2 += points[i].y * points[i].y;
xy += points[i].x * points[i].y;
}
w = (float) count;
}
else
{
for( i = 0; i < count; i += 1 )
{
x += weights[i] * points[i].x;
y += weights[i] * points[i].y;
x2 += weights[i] * points[i].x * points[i].x;
y2 += weights[i] * points[i].y * points[i].y;
xy += weights[i] * points[i].x * points[i].y;
w += weights[i];
}
}
x /= w;
y /= w;
x2 /= w;
y2 /= w;
xy /= w;
dx2 = x2 - x * x;
dy2 = y2 - y * y;
dxy = xy - x * y;
t = (float) atan2( 2 * dxy, dx2 - dy2 ) / 2;
line[0] = (float) cos( t );
line[1] = (float) sin( t );
line[2] = (float) x;
line[3] = (float) y;
}
案例:直线拟合
有如下的原图:
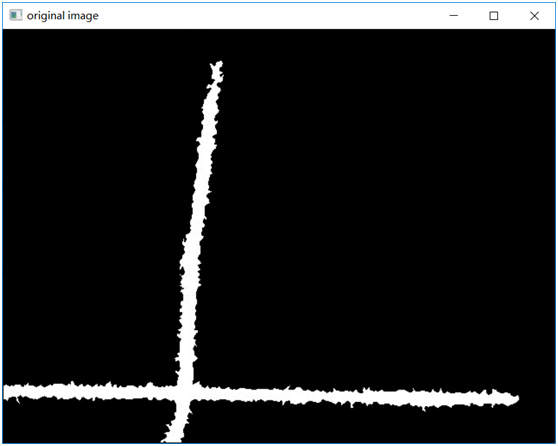
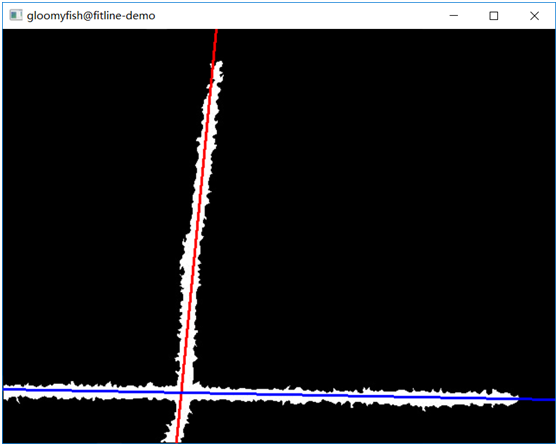
通过OpenCV的距离变换,骨架提取,然后再直线拟合,使用DIST_L1得到的结果如下:
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
算法
+关注
关注
23文章
4810浏览量
98603 -
最小二乘法
+关注
关注
0文章
22浏览量
8748 -
OpenCV
+关注
关注
33文章
652浏览量
45107
发布评论请先 登录
相关推荐
热点推荐
【每周一练】拟合公式
使用方法:根据data.xlsx中X与Y求出最佳直线,仅限于直线。用途:比如PT100传感器,气压传感器,位移传感器等线性传感器,测出电压或电阻与真实值的关系,写入data.xlsx
发表于 12-24 00:17
Labview线性拟合时如何指定最终拟合直线的斜率?
如题,使用线性拟合VI时为何设定的斜率上下限没有起到作用?我想用一组已知数据拟合一条斜率固定的直线,该如何实现?求大神指点?也可用Matlab程式实现。以下是我自己写的
发表于 04-03 20:09
【设计技巧】rtos的核心原理简析
rtos的核心原理简析rtos全称real-time operating system(实时操作系统),我来简单分析下:我们都知道,c语句中调用一个函数后,该函数的返回地址都是放在堆栈中
发表于 07-23 08:00
直线拟合求解的推导过程
(1)求解的推导过程:最小二乘拟合直线的推导过程如下:假设直线方程为:设有n对观测值(xi,yi),则列出如下方程:整理得:其中A、EA、L的表达式如下:最后解算直线
发表于 08-18 08:04
EPON技术简析
EPON技术简析
EPON是一个新技术,用于保证提供一个高品质与高带宽利用率的应用。
EPON在日本、韩国、中国大陆、中国台湾及其它以以太网络为基础的地区都
发表于 01-22 10:43
•1232次阅读




评论