 温度传感选择,传统NTC与线性PTC
温度传感选择,传统NTC与线性PTC
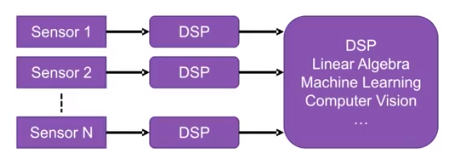
电子发烧友网报道(文/李宁远)从可穿戴设备到虚拟助手,再到汽车雷达/激光雷达,各种传感器在边缘设备中的使用越来越多,这不仅要求SoC在DSP性能和低功耗/面积之间取得最佳平衡,还要求SoC开发人员能够轻松扩展其硬件架构以处理不同数量的数据流。
Sensor Fusion传感器融合
传感器融合的目的简单来说,就是结合大量传感设备的数据得出更精准的结果。因为各类传感器都有自己的优劣势,不可能从单一传感获得我们所需要的所有功能,因此sensor fusion传感器融合这一概念应运而生。得益于MEMS技术的发展以及传感器成本在逐渐下降,很多传感设备都能应用到这一概念中来。
其中在日常生活中,已经有很多sensor fusion的应用,一个大家都会用到的例子就是计步器。要达到比较精准的步伐计算,通常会融合加速度计、陀螺仪、磁力仪等等。有的计步器为了感知周围环境还会加上压力传感器、温度传感器。这种简单的应用不需要太高的运算能力,小型MCU上的几十个MIPS就足够。
涉及全屋智能、汽车自动驾驶ADAS这种场景sensor fusion就复杂多了,会涉及很多交互、感知、识别。这种场景计算要求很高,而且需要动态管理计算资源,并且通常来说,这类应用里功耗都是受限的。
sensor fusion是一个基础模块,有了它,便可以实现稳定的定位、稳定的目标检测以及稳定的单目标多目标跟踪。sensor fusion并不是简单的传感器堆叠,它是传感器的属性合一。以现在最火热的汽车ADAS应用来说,摄像头、Lidar以及Radar的融合是最常见的。这些传感器进行融合的先决条件,是传感器必须在一个共同参考系中,同时传感器必须能够以某些方式同步或者能用一个通用的时间参考。
时间同步是很重要的一个环节,不同传感器触发方式不相同,原始数据帧率也各不相同,从10Hz到几百Hz不等。有的传感器自带时间基准,有的需要外部时间戳。一般由硬件同步板卡来完成很高精度的时间同步。
Sensor Fusion异构处理需求
各式各样的传感设备意味着有着各式各样的数据需要处理,不同数据的处理可能有着天差地别的处理方式,因此有弹性的处理方式更契合现在的sensor fusion。
(DSP与sensor fusion,Synopsys)
因为这种应用里包含了大量的运算,通用处理器已经不太适合,一般采用DSP或特定的硬件加速器。而硬件加速器只适用特定的应用,不太适合可能需要各种运算的传感器融合系统。而向量DSP有大量的并行处理,包括VLIW,SIMD以及多核,可以很好地满足PPA的要求。
DSP IP如何助力sensor fusion面临的挑战?
在前端处理上,DSP处理与传感器相关的输出信息,这些前端处理上往往会涉及包括F相关算术运算,比如FFT,CFAR,以及线性代数和非线性代数,以及向量运算等等基础的资料处理运算。后端处理根据应用会有很大的变化,像物体侦测、物体识别,物体追踪等等应用里DSP运算会随着时间不断演进,运算的资料形态也根据实际情况不尽相同,运算多样弹性较高。
这里会涉及数据的关联,Lidar提供3D点云数据,图像提供2D数据,毫米波雷达提供雷达点,这些数据全部关联起来需要进行匹配计算做特征匹配,会有大量的运算需求。DSP除了能提供这些前后端处理的计算能力,也能够分担一些融合中和AI相关的计算任务。一个好的DSP IP很适合作为sensor fusion的运算单元,提供运算的弹性,支援多样的运算。
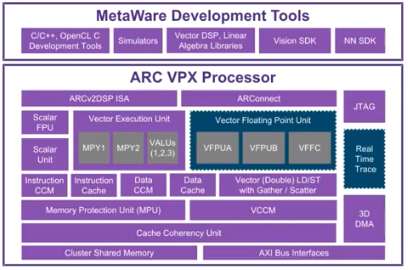
(ARC VPX DSP IP,Synopsys)
什么样的DSP IP可以降低sensor fusion在SoC层面面临的挑战?首先,从一体式结构来说,DSP IP需要提供丰富的接口集是很有必要的,启动器接口、目标总线接口以及支持外设和加速器集成的接口都需要支持。高效的数据移动能力不必多说,这不仅需要能从内存和外设中移动数据的高效DMA,还要能提供在高内存延迟上的恢复能力。最后,一流的PPA当然也是不能少的,更高的运算能力更少的功耗总是更好的。
小结
各种sensor fusion应用推动了对更高效数字信号处理的需求,采用经过VLIW,SIMD,多核等并行处理器技术优化后的DSP IP,可以在遵守单一编程环境的同时来优化处理一系列sensor fusion应用里的工作负载。
-
温度传感器
+关注
关注
48文章
2938浏览量
156003 -
NTC
+关注
关注
7文章
423浏览量
52039 -
PTC
+关注
关注
4文章
299浏览量
41880
发布评论请先 登录
相关推荐
NTC热敏电阻和PTC热敏电阻的区别是什么
浅谈水温测量型消费电子如何选择NTC温度传感器
高精度NTC温度传感器:精准化行业领航员


NTC温度传感器的工作原理和性能特点
你分得清PTC热敏电阻和NTC热敏电阻吗?
教你如何分辨PTC热敏电阻和NTC热敏电阻

如何辨别NTC/PTC热敏电阻
SMD NTC Thermistor NTC热敏电阻在锂电池充放电中的作用(NYFEA徕飞)
ptc和ntc热敏电阻区别
分析对比NTC、PTC、TVS、MOV的不同
SMD NTC Thermistor NTC热敏电阻(贴片式)





 工商网监
工商网监
评论