 伺服电机噪音及不稳定分析
伺服电机噪音及不稳定分析
用户在一些机械上使用伺服电机时,经常会发生噪声过大,电机带动负载运转不稳定等现象。出现此问题时,许多使用者的第一反应就是伺服电机质量不好,因为有时换成步进电机或是变频电机来拖动负载,噪声和不稳定现象却反而小很多。表面上看,确实是伺服电机的原故,但我们仔细分析伺服电机的工作原理后,会发现这种结论是完全错误的。
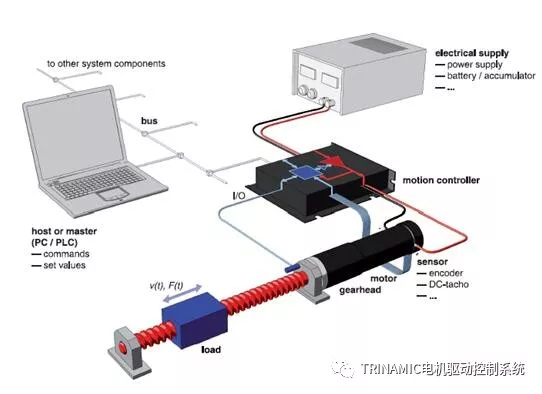
伺服系统包括:伺服驱动器、伺服电机和一个反馈传感器(一般伺服电机自带光学编码器)。所有这些部件都在一个控制闭环系统中运行:驱动器从外部接收参数信息,然后将一定电流输送给步进伺服电机,通过电机转换成扭矩带动负载,负载根据它自己的特性进行动作或加减速,传感器测量负载的位置,使驱动装置对设定信息值和实际位置值进行比较,然后通过改变电机电流使实际位置值和设定信息值保持一致,当负载突然变化引起速度变化时,编码器获知这种速度变化后会马上反应给伺服驱动器,驱动器又通过改变提供给伺服电机的电流值来满足负载的变化,并重新返回到设定的速度。
伺服系统是一个响应非常高的全闭环系统,负载波动和速度较正之间的时间滞后响应是非常快的,此时,真正限制了系统响应效果的是机械连接装置的传递时间。
举例
一台机械是用伺服电机通过V形带传动一个恒定速度、大惯性的负载。整个系统需要获得恒定的速度和较快的响应特性,分析其动作过程:
当驱动器将电流送到电机时,电机立即产生扭矩;一开始,由于V形带会有弹性,负载不会加速到像步进电机那样快;伺服电机会比负载提前到达设定的速度,此时装在电机上的编码器会削弱电流,继而削弱扭矩;随着V型带张力的不断增加会使电机速度变慢,此时驱动器又会去增加电流,周而复始。
在此例中,系统是振荡的,电机扭矩是波动的,负载速度也随之波动。其结果当然会是噪音、磨损、不稳定了。不过,这都不是由伺服电机引起的,这种噪声和不稳定性,是来源于机械传动装置,是由于伺服系统反应速度(高)与机械传递或者反应时间(较长)不相匹配而引起的,即伺服电机响应快于系统调整新的扭矩所需的时间。
找到了问题根源所在,解决以上例子问题,您可以:
1.增加机械刚性和降低系统的惯性,减少机械传动部位的响应时间,如把V形带更换成直接丝杆传动或用齿轮箱代替V型带。
2.降低伺服系统的响应速度,减少伺服系统的控制带宽,如降低伺服系统的增益参数值。
以上只是噪声不稳定的原因之一。针对不同的原因,会有不同的解决办法。如由机械共振引起的噪声,在伺服方面可采取共振抑制,低通滤波等方法,总之,噪声和不稳定的原因,基本上都不会是由于伺服电机本身所造成。
审核编辑:汤梓红
-
驱动器
+关注
关注
53文章
8332浏览量
147334 -
伺服电机
+关注
关注
85文章
2062浏览量
58389 -
噪音
+关注
关注
1文章
170浏览量
23959 -
伺服系统
+关注
关注
14文章
576浏览量
39400
发布评论请先 登录
相关推荐
无线网络不稳定因素分析
调速电机转速不稳定
微型减速电机电压不稳定该怎么处理?
机械不稳定与共振
诊断和稳定不稳定开关电源的快速提示





 工商网监
工商网监
评论