 如何实现端到端网络切片?
如何实现端到端网络切片?

3GPP将网络切片定义为5G 网络的主要功能之一,网络切片可看作是动态创建的逻辑端到端网络。在深入研究网络切片的概念之前,我们先简单回顾下 5G 的三大应用场景。
5G用例
移动规范开发的主要机构 3GPP 正在努力实现5G的三个基本用例:
eMBB(增强移动宽带):指在现有移动宽带业务场景的基础上,对于用户体验等性能进一步提升,追求人与人之间极致的通信体验。
超可靠低延迟通信(URLLC):对关键任务通信的可靠性和延迟有严格要求的通信,其中包括自动驾驶汽车、远程手术或触觉互联网。
大规模机器类型通信(mMTC):需要在有限区域内支持极大量设备的通信,这些设备只能间歇性地发送数据,如与物联网(IoT)相关的用例。
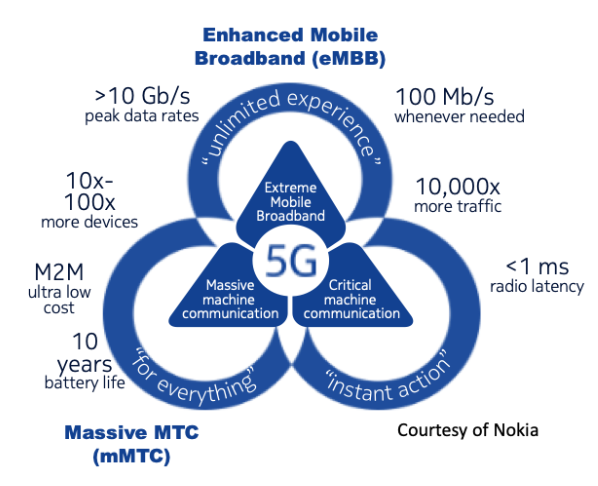
图1 5G用例 如图 1 所示,5G 网络必须同时支持延迟、吞吐量、容量等多样化且极端的要求,并且需要精心设计架构,以在服务能力和网络投资之间提供最佳平衡。运营商还应承诺实现特定的服务水平目标 (SLO),以实现其业务目标或遵守每个用例的约定功能。这就是网络切片的用武之地。
定义网络切片
3GPP 将网络切片定义为: “网络切片是提供特定网络能力和网络特性的逻辑网络”。 理想情况下,网络切片允许在相同的物理网络中动态地创建逻辑网络,以支持不同的用例和流量负载。网络切片是一个端到端的概念,从用户设备延伸到接入网(AN)、传输网(TN)和核心网(CN)。 端到端切片提供适当的隔离、资源和优化的虚拟网络架构,以服务于特定用例、SLO 要求或业务解决方案。 网络切片经过编排,形成运行在同一物理网络上的特定服务逻辑网络,这些逻辑网络满足某些服务属性,如数据速度、容量、延迟、可靠性、可用性、覆盖范围和安全性。网络切片使运营商能够为每个用例或服务组建立不同的功能、部署和体系架构,可以并行运行多个网络实例。
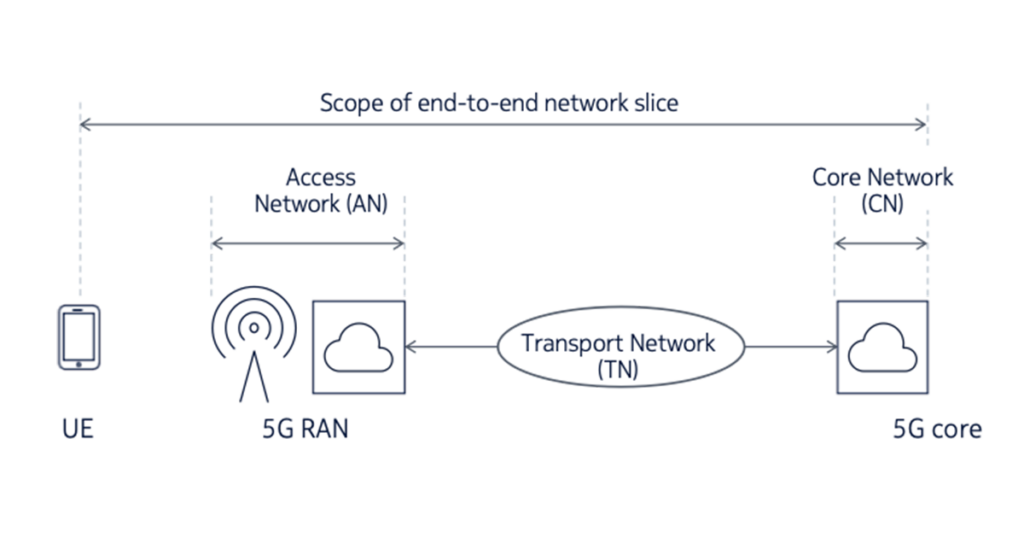
图2 端到端5G切片范围 如图 2 所示,一个典型的 5G 网络可以概括为以下几个部分:
用户设备 (UE):通过“空口”连接到移动网络的最终用户终端。
接入网络 (AN):构成无线接入网络 (RAN) 的一组元素,包括基站、天线和频谱资源。
在RAN解耦的情况下,它还包括诸如无线电单元 (RU)、分布式单元 (DU) 和集中式单元 (CU) 等元素。图 2 是一个简化图,并未显示所有可能的RAN功能拆分。
核心网 (CN):包括一组信令、身份验证、用户管理、移动性、与外部网络的接口以及其他控制平面和管理平面服务的功能。5G 核心可能分布在网络内的不同位置。
传输网络 (TN):用于承载 AN 和 CN 之间的传输流量。在RAN 架构解耦的情况下,也会有 TN 互连 RAN 组件(例如 RU、DU 和 CU)的实例。
网络切片用例示例
示例 1:自动车辆切片需要端到端网络为服务用例的特定切片实例提供数据速率、可靠性、延迟、通信范围和速度等功能。 示例 2:服务于智能计量或可穿戴医疗设备等应用的物联网切片需要网络安全、高效且经济地支持大量低延迟和高密度物联网设备。
实现网络切片
如上所述,5G 网络切片可用于确保端到端性能,以及服务和应用需求以满足客户期望。要实现网络切片,必须对各个网段(接入网、传输网和核心网)进行整体检查。需要在整个网络中编排网络切片的生命周期。 图 3 说明了端到端切片实现中涉及的关键元素。这个特定的网络为租户 A、B 和、C三个客户提供网络切片服务。
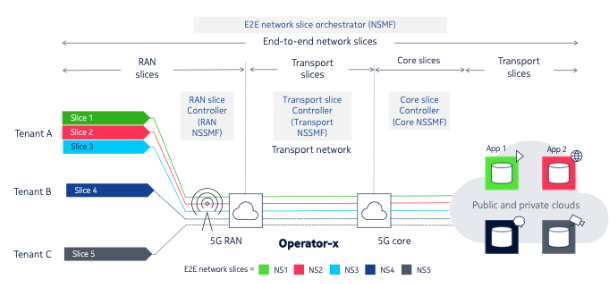
图3 -端到端网络切片 租户 A 具有三个不同的切片,而租户 B 和 C 各有一个切片。每个切片都被构建为一个端到端网络切片,由几个子片组成:
一个 RAN(子)切片
将 RAN 切片连接到核心网切片的传输网(子)切片
一个核心(子)切片
连接核心网的第二个传输网(子)片
上面的每个切片都由特定于域的编排器/控制器进行生命周期管理,在 3GPP 中称为网络切片子网管理功能 (NSSMF):
RAN 切片由 RAN 控制器或 RAN NSSMF 管理
传输网切片由传输片控制器或传输 NSSMF 管理
核心网切片由核心控制器或核心 NSSMF 管理
NSSMF 具有实现该域中的子切片所需的特定领域知识。NSSMF 负责:
创建切片
维护切片
当不再需要时终止切片
实现一个北向接口,该接口公开域的抽象视图,并允许 NSMF 使用切片(见下文)
此层次结构的最高级别包含一个端到端网络切片协调器,用3GPP术语来说是网络切片管理功能 (NSMF)。NSMF 具有将子切片拼接在一起以创建端到端切片的功能。NSMF 通过它们的北向接口与 NSSMF 通信以执行此操作。反过来,它还公开了一个抽象的北向接口,以允许使用其服务来创建端到端切片。 每个特定于域的子片根据性质分配或提供以下资源类型中的一种或多种:
虚拟和物理网络功能
光谱
带宽
传输层连接模型
增强服务(例如网络分析和安全服务)
服务质量 (QoS) 配置文件
应用功能
例如,核心网切片可以为信令流量分配专用的计算资源。传输网切片可以使用机制将网络容量分配给每个切片。
硬切片和软切片
网络资源的共享水平“硬切片和软切片”取决于与网络能力相关的服务水平目标。 “硬切片”和“软切片”之间的主要区别在于,硬切片导致网络资源专用于一个切片,而软切片允许使用共享资源。 为每个网络切片实例分配专用的、非共享资源可保障每个应用程序或客户所需的性能、可用性和可靠性。然而,如果这些资源没有被完全使用,也不能用于其他切片。因此,硬切片可能不是很划算。 软切片允许传输资源的可控的超预订,可以让网络资源更经济地用于约束较宽松的大容量应用程序。
传输网切片
本文前半部分介绍了端到端切片的定义以及它是如何实现的,后半部分将侧重于传输网切片以及如何实现方式。 传输网切片可以定义为物理网络功能 (PNF) 和虚拟网络功能 (VNF) 之间的一组不同的连接。此类传输网切片具有确定性 SLA,以实现完整端到端网络切片的端到端 SLO。这些 SLO 包括 QoS、可用性、延迟和数据包丢失等参数。 多年来,IP 和光传输网络一直使用各种网络虚拟化技术来交付虚拟网络。那么,在传输网切片方面有什么新东西呢?传输网络的关键要求是:
新 SLO 类型的关联,例如延迟,在以前要求并不严格。此外,需要确保在服务的整个生命周期内遵守 SLO
数据平面技术可以扩展以支持细粒度的流量工程
使用流遥测技术实现网络状态和性能的近实时可见性
使用模型驱动的方法增强网络可编程性,例如 YANG 模型
需要集中的路径计算,而这反过来又需要新的网络可见性机制
网络和控制系统之间的闭环反馈回路
允许传输控制器 (NSSMF) 与端到端协调器 (NSMF) 通信的抽象 API
未来满足端到端网络切片的 SLA,IP 传输网切片必须满足几个要求:

表1 - IP切片要求 表 2 提供了一组候选技术解决方案,可满足表 1 中的需求。

表2 - IP切片候选方案 表2的功能集可以组合起来构建一个传输网络,它与中央控制器形成一个闭环,如图4所示。
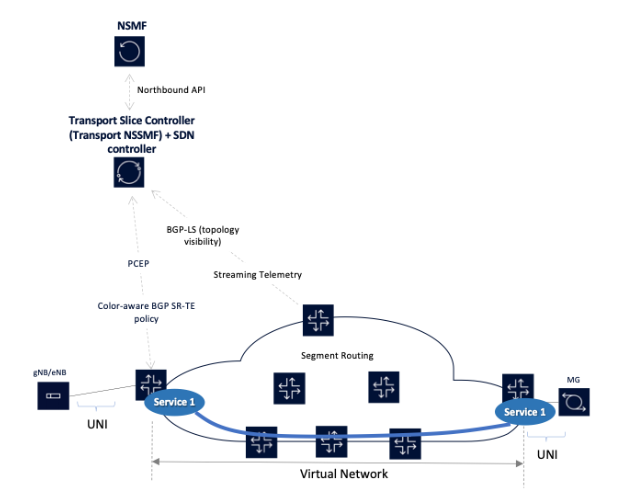
图4 -实现分段路由传输网切片的闭环 在该示例中,在实现传输网切片的数据平面网络与管理和/或编排网络的控制器之间存在闭环反馈回路。
#
在这个网络中:
基站(gNB/eNB)和移动网关(MG)之间需要开通服务。
该服务具有一定的SLO,例如最大延迟限制。
有一个控制器既可用作 SDN 控制器,也可用作传输 NSSMF。
网络通过 BGP-LS 向控制器公开自己的拓扑结构。
该网络还向控制器传输遥测信息,以便控制器对该网络有最新的了解。遥测信息包括链路利用率和延迟等。
控制器使用路径计算引擎来计算gNB/eNB连接到 MG的边缘路由器之间的路径。
控制器使用 PCE 或 BGP SR-policy ,将计算的路径信息传送到边缘路由器;边缘路由器将此路径信息嵌入到与此服务相关的数据包中。
一旦路径建立,控制器就会持续监控网络以确保 SLO 继续得到满足。如果业务所在路径的网络状况恶化,控制器会将业务重新路由到其他合规的路径上。
控制器作为传输NSSMF的角色,还向 NSMF 公开 API,以便 NSMF 可以编排包含传输切片组件的端到端切片。
为什么使用分段路由进行切片
通过流量工程,服务提供商可以提供差异化的服务和增强的SLO。然而,在实现对流量路由进行更精细的控制时,网络运营商总是因可扩展性问题而陷入停滞。 目前基于RSVP-TE的分组网络中的流量工程解决方案只支持粗级别的控制。应用 RSVP-TE 来设计更细粒度服务流的尝试总是因可扩展性问题而失败。分段路由(Segment Routing)是一种新的隧道模式,可以与软件定义网络 (SDN) 应用程序结合使用,以解决实现具有良好可扩展性和精细控制的难题。 与 RSVP-TE 和标签分发协议 (LDP) 不同,分段路由不需要在每个隧道的基础上进行控制平面的信令。它只需要入口边缘路由器来保持每个服务的状态,删除了来自中间和出口边缘路由器的状态管理要求。这使得分段路由的可扩展性比RSVP-TE好得多,同时提供了大部分相同的功能。 虽然分段路由提供了在网络中构建转发路径的能力,但需要一些抽象智能来指示入口路由器在网络中使用什么路径,以及使用什么服务。这种智能可以由一个外部流量工程控制器提供,该控制器充当有状态的活动路径计算元素 (PCE),基于实时网络状态提供对网络资源的端到端控制。这确保了昂贵的广域网(WAN)容量得到有效利用,并且由于其网络范围的可见性,确保了网络可以提供特定的服务需求,如在需要时的脱节。 使用集中式控制器还有助于在 WAN 中使用 SDN,通过自动创建和/或删除特定服务可用的带宽来提供更灵活的联网方式。这反过来又允许引入诸如带宽日历或按需带宽之类的服务。 因此,分段路由是传输网实现网络切片所需服务能力的理想技术。
审核编辑 :李倩
-
3GPP
+关注
关注
4文章
419浏览量
47318 -
5G
+关注
关注
1368文章
49229浏览量
640989 -
网络切片
+关注
关注
3文章
201浏览量
13262
原文标题:如何实现端到端网络切片?
文章出处:【微信号:SDNLAB,微信公众号:SDNLAB】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
Nullmax感知规划端到端大模型进化提速
格灵深瞳灵感实验室推出端到端开发平台AI Edge Studio
如何训练好自动驾驶端到端模型?

端到端智驾模拟软件推荐——为什么选择Keymotek的aiSim?
Nullmax端到端轨迹规划论文入选AAAI 2026
自动驾驶中端到端仿真与基于规则的仿真有什么区别?
自动驾驶中“一段式端到端”和“二段式端到端”有什么区别?

黑芝麻智能端到端全栈式辅助驾驶系统的应用场景
端到端发展趋势下,云算力如何赋能智能驾驶技术跃迁?

自主工具链助力端到端组合辅助驾驶算法验证

Nullmax端到端自动驾驶最新研究成果入选ICCV 2025

为什么自动驾驶端到端大模型有黑盒特性?





评论