 虚拟数字机器人仿真测试验证平台(C6657+FPGA架构)
虚拟数字机器人仿真测试验证平台(C6657+FPGA架构)
一、平台特点
真正提供机器人控制器检测、验证平台,可检测各类工业机器人控制器的功能、性能指标;
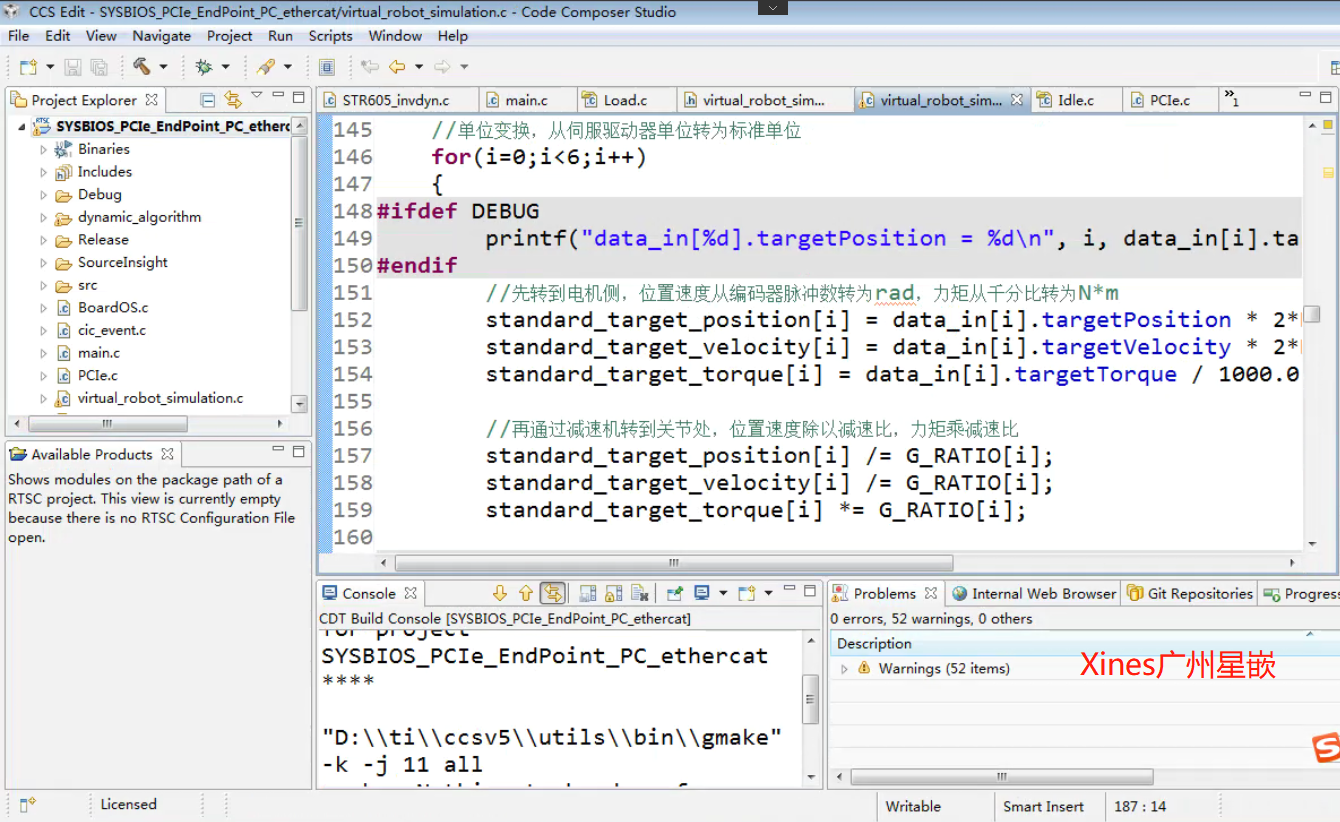
全国产化,具备从虚拟机器人软件框架到硬件采集电路全方位自主开发;
提供基于EtherCAT协议的检测、验证接口,提供“实物机器人+半物理平台+虚拟机器人”的运动及动力学系统辨识场景。
允许基于EtherCAT总线的机器人控制器连接,仿真硬件可实时吞吐仿真数据,实现ms级的检测、验证。


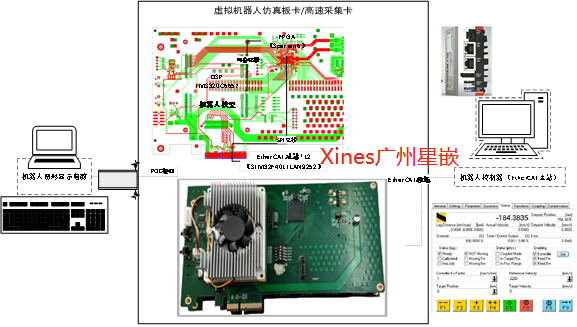
系统构成:
硬件包括DSP高速采集板+12个EtherCAT从站板,通过PCIe总线扩展;
软件架构:
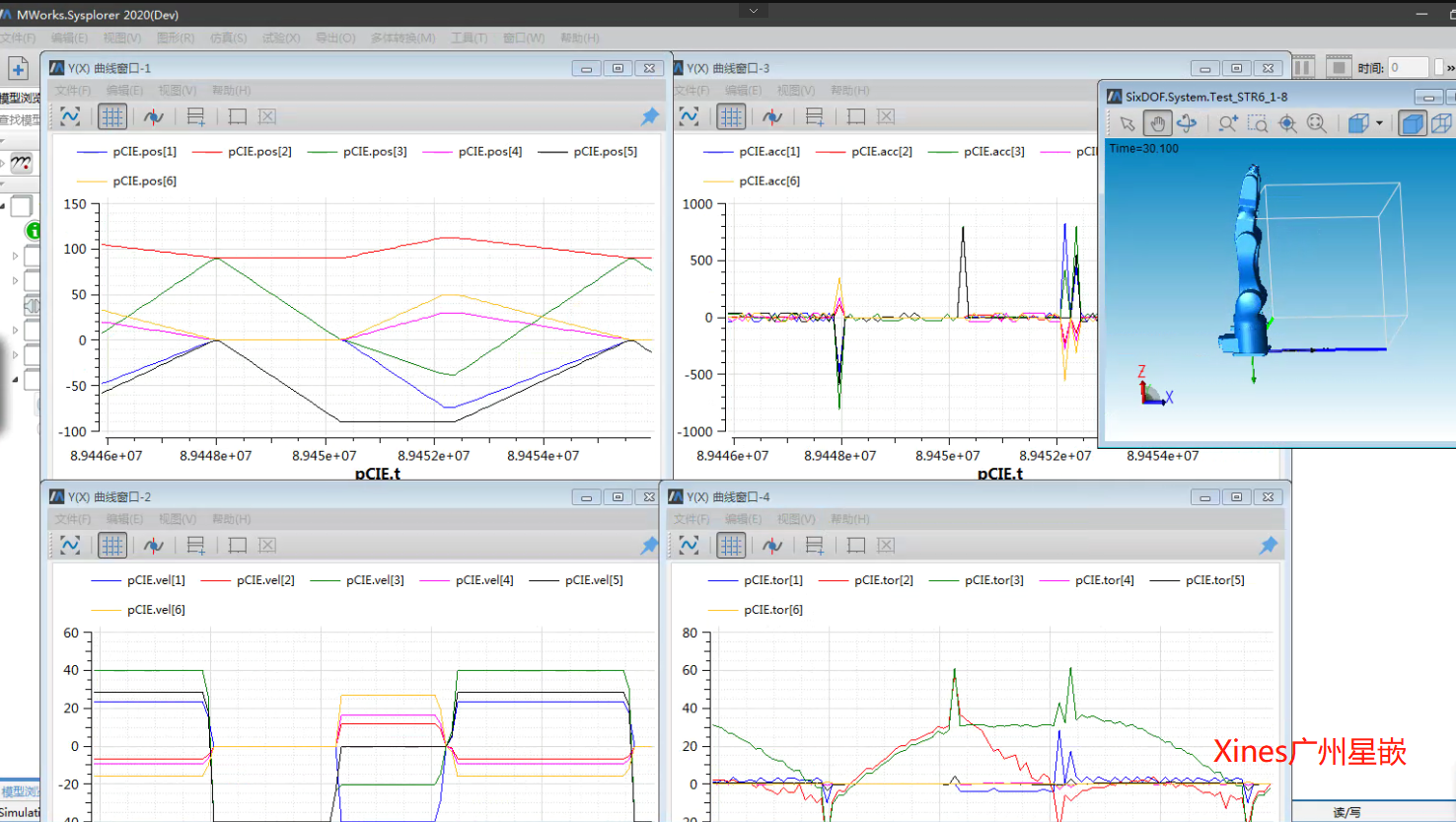
支持Qt的可扩展检测界面,验证案例库,可导入机器人实体3D模型库,EtherCAT 组件库,数据分析和演示库,输出检测、验证表单等功能模块;
产品特色:
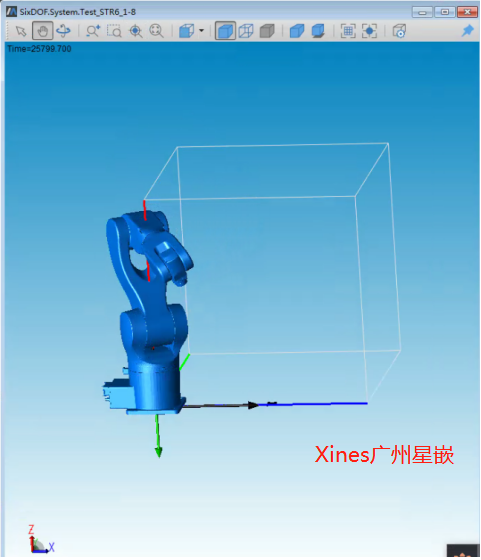
带重力场/摩擦力模型的矢量环境,可导入标准CAD模型,并提供数字电机、数字编码器、数字减速机建模,重构虚拟机器人物理元素,最大支持12个机器人关节及外轴模型;
二、系统优势
快速导入机器人3D模型,仅需一块PCIe卡连接一条网线,即可实现面向机器人控制器的功能与性能实验、测试、验证工作,国内首创;
基于EtherCAT协议,集成多种开发包,既可支持研究、开发方案验证,又可作为标准检测工具,可安全检测满负荷、超负荷运动及动力学功能;
实时接入EtherCAT从站,配置ESI文件为标准ECAT从站;兼容倍福、卡诺普、KEBA、固高、埃斯顿等工业机器人主站;支持采用KPA、acontis、codesys、 igh、 soem等被检主站控制器;
不仅仅是动画,是带采集硬件的科研平台!!!
实物展示
咨询未必选择,只是多一个参考,欢迎交流与合作。
审核编辑 黄昊宇
-
机器人
+关注
关注
211文章
28390浏览量
206951 -
仿真测试
+关注
关注
0文章
84浏览量
11303
发布评论请先 登录
相关推荐
高压放大器在水下扑翼软体机器人研究中的应用


ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
Al大模型机器人
工业机器人仿真软件有哪些
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
【分享】基于Easygo仿真平台的三电机实时仿真测试应用
广和通发布基于高通高算力芯片的具身智能机器人开发平台Fibot
广和通发布机器人开发平台
广和通发布具身智能机器人开发平台Fibot
NVIDIA Isaac机器人平台升级,加速AI机器人技术革新
NVIDIA入局人形机器人!Isaac平台迎来重要更新

多电机仿真篇丨双电机实时仿真测试应用
使用 NVIDIA Isaac 仿真并定位 Husky 机器人






 工商网监
工商网监
评论