 稀疏光流跟踪(KLT)算法详解
稀疏光流跟踪(KLT)算法详解
稀疏光流跟踪(KLT)详解
在视频移动对象跟踪中,稀疏光流跟踪是一种经典的对象跟踪算法,可以绘制运动对象的跟踪轨迹与运行方向,是一种简单、实时高效的跟踪算法,这个算法最早是有Bruce D. Lucas and Takeo Kanade两位作者提出来的,所以又被称为KLT。KLT算法工作有三个假设前提条件:
亮度恒定
短距离移动
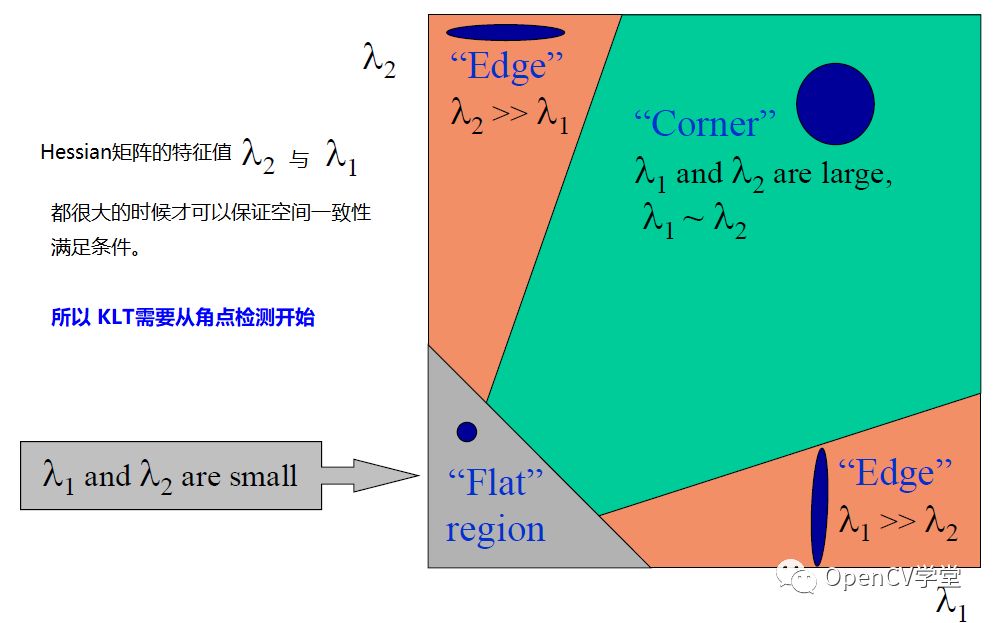
空间一致性
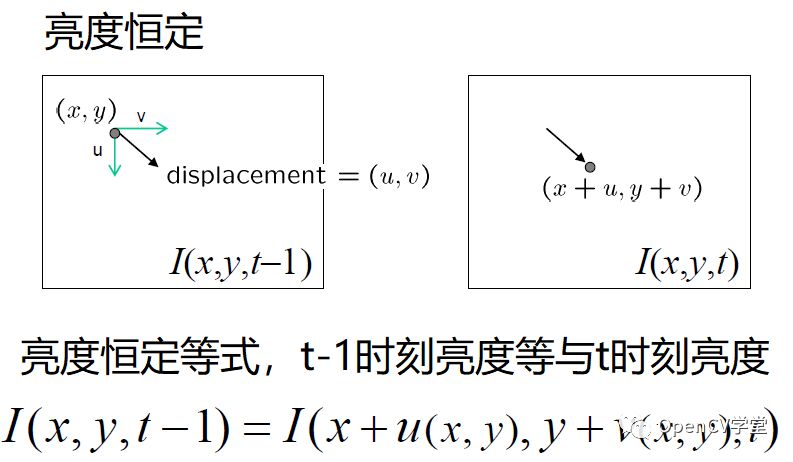
亮度恒定
对象中任意像素点p(x,y)亮度值,在t-1时候的值,在t时刻移动(u, v)之后亮度值保持不变
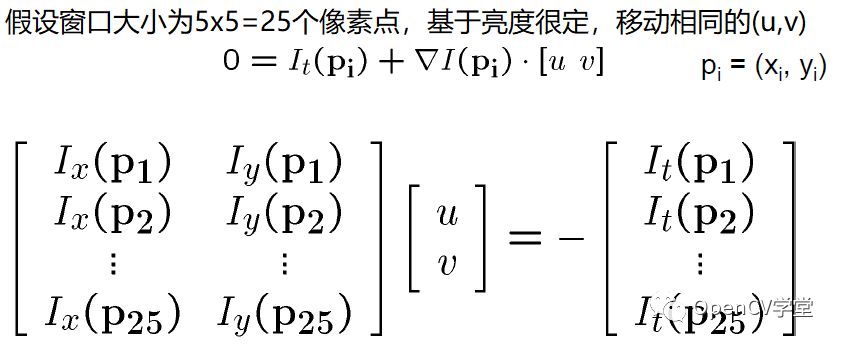
空间一致性
假设对像素点p(x, y)来说,周围的像素点都保持相同的移动距离(u, v) 假设窗口大小为5x5,则对于25个窗口内的像素点来说,就会如下等式成立:
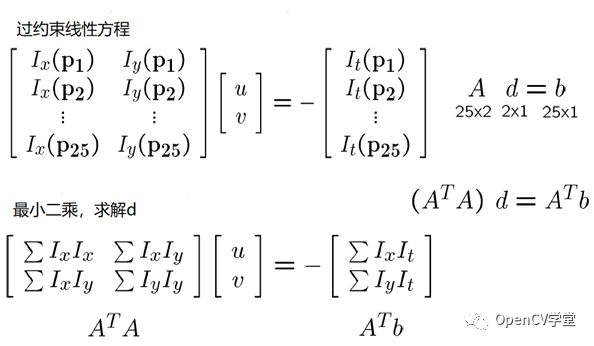
得到下面的过约束等式,根据最小二乘可以求解(u, v):
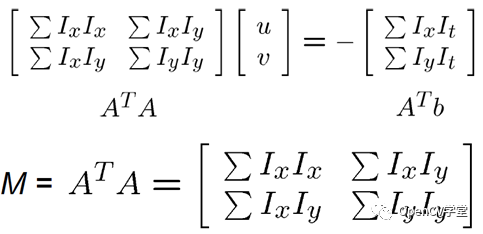
这样我们就得到了KLT光流等式与该窗口的的Hessian矩阵
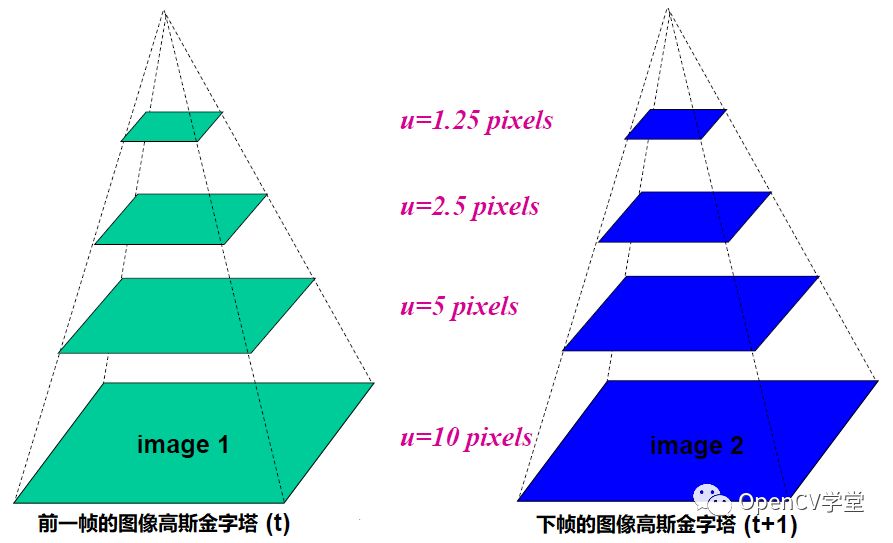
空间尺度不变性
通过建立每一帧的图像金字塔,实现尺度空间窗口目标对象搜索
OpenCV中KLT演示代码实现
voidcv::calcOpticalFlowPyrLK( InputArrayprevImg,//前一帧图像 InputArraynextImg,//后一帧图像 InputArrayprevPts,//前一帧的稀疏光流点 InputOutputArraynextPts,//后一帧光流点 OutputArraystatus,//输出状态,1表示正常该点保留,否则丢弃 OutputArrayerr,//表示错误 SizewinSize=Size(21,21),//光流法对象窗口大小 intmaxLevel=3,//金字塔层数,0表示只检测当前图像,不构建金字塔图像 TermCriteriacriteria=TermCriteria(TermCriteria::EPS,30,0.01),//窗口搜索时候停止条件 intflags=0,//操作标志 doubleminEigThreshold=1e-4//最小特征值响应,低于最小值不做处理 )
特征点检测与绘制的代码实现如下:
//detectfirstframeandfindcornersinit Matold_frame,old_gray; capture.read(old_frame); cvtColor(old_frame,old_gray,COLOR_BGR2GRAY); goodFeaturesToTrack(old_gray,featurePoints,maxCorners,qualityLevel,minDistance,Mat(),blockSize,useHarrisDetector,k);
特征点绘制
voiddraw_goodFeatures(Mat&image,vectorgoodFeatures){ for(size_tt=0;t< goodFeatures.size(); t++) { circle(image, goodFeatures[t], 2, Scalar(0, 255, 0), 2, 8, 0); } }
KLT跟踪代码如下
TermCriteriacriteria=TermCriteria(TermCriteria::COUNT+TermCriteria::EPS,30,0.01);
doublederivlambda=0.5;
intflags=0;
boolret=capture.read(frame);
if(!ret)break;
imshow("frame",frame);
roi.x=0;
frame.copyTo(result(roi));
cvtColor(frame,gray,COLOR_BGR2GRAY);
//calculateopticalflow
calcOpticalFlowPyrLK(old_gray,gray,pts[0],pts[1],status,err,Size(31,31),3,criteria,derivlambda,flags);
特征点状态检查与匹配的代码如下
size_ti,k;
for(i=k=0;i< pts[1].size(); i++)
{
// 距离与状态测量
double dist = abs(pts[0][i].x - pts[1][i].x) + abs(pts[0][i].y - pts[1][i].y);
if (status[i] && dist >2){
pts[0][k]=pts[0][i];
initPoints[k]=initPoints[i];
pts[1][k++]=pts[1][i];
circle(frame,pts[1][i],3,Scalar(0,255,0),-1,8);
}
}
//resize有用特征点
pts[1].resize(k);
pts[0].resize(k);
initPoints.resize(k);
绘制跟踪轨迹的代码如下
//绘制跟踪轨迹 draw_lines(frame,initPoints,pts[1]);
该方法实现如下:
voiddraw_lines(Mat&image,vectorpt1,vector pt2){ if(color_lut.size()< pt1.size()) { for (size_t t = 0; t < pt1.size(); t++) { color_lut.push_back(Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255))); } } for (size_t t = 0; t < pt1.size(); t++) { line(image, pt1[t], pt2[t], color_lut[t], 2, 8, 0); } }
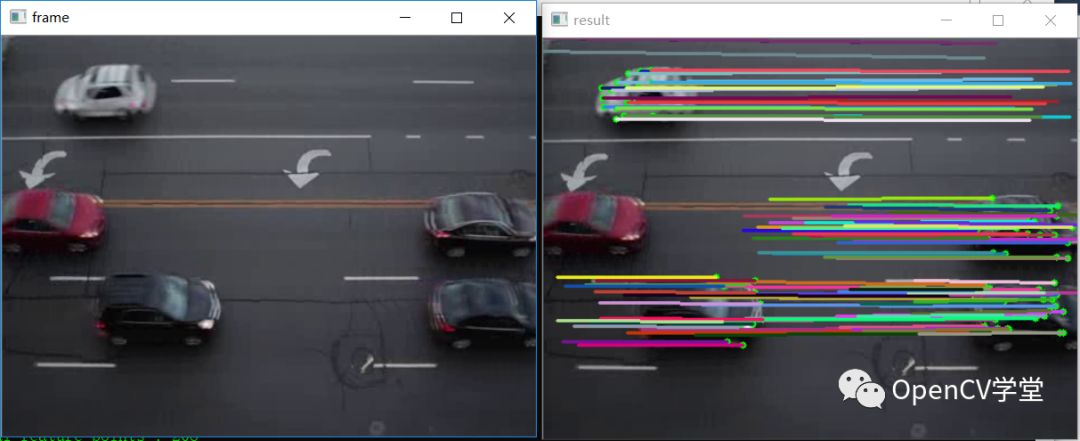
运行效果:
左侧是视频的原始每一帧、右侧视频是每一帧中KLT算法实时轨迹绘制
车辆运行轨迹跟踪
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
跟踪算法
+关注
关注
0文章
41浏览量
13010 -
OpenCV
+关注
关注
31文章
635浏览量
41345 -
KLT
+关注
关注
0文章
5浏览量
7462
原文标题:干货 | OpenCV中KLT光流跟踪原理详解与代码演示
文章出处:【微信号:CVSCHOOL,微信公众号:OpenCV学堂】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
天合跟踪受邀参加2024光伏行业年度大会
近日,由中国光伏行业协会举办的 2024光伏行业年度大会在四川宜宾盛大开幕。会议邀请行业主管部门,行业组织、专家、光伏企业领袖等一同就行业发展热点问题进行深度探讨解析,天合跟踪智能控制系统研发负责人孙凯博士应邀出席
Hi7200 高精度同步切光降压 LED 恒流驱动器
Hi7200 是一款外围电路简洁的同步降压 LED 恒流驱动器,适用于 6V-65V 输入电压范围的 LED 恒流照明领域,调光深度深,低辉负载调整率和一致性好。
Hi7200 采用我司专利算法
发表于 11-25 16:32
视频目标跟踪从0到1,概念与方法
导读从目标跟踪的应用场景,底层模型,组件,类型和具体算法几个方面对目标跟踪做了全方面的介绍,非常好的入门文章。在今天的文章中,我们将深入研究视频目标跟踪。我们从基础开始,了解目标


抖动跟踪不丢失 慧视图像跟踪板和自研算法强势升级
成都慧视开发的Viztra-HE030图像处理板是采用了瑞芯微旗舰级高性能芯片RK3588,能够凭借八核处理核心输出至高6.0TOPS的算力,在算法的强力辅助下,能够实现对目标的稳定锁定跟踪。随着

过零双向可控硅驱动光耦KLT304X&KLT306X&KLT308X 产品规格书
KLT304X&KLT306X&KLT308XDIP4过零双向可控硅驱动光耦1.产品特点Productfeatures•无卤素(溴
发表于 08-20 15:47
•0次下载
随机相位可控硅驱动光耦KLT302X&KLT305X 产品规格书
KLT302X&KLT305XDIP4随机相位双向可控硅驱动光耦1.产品特点Productfeatures•无卤素(溴
发表于 08-20 15:45
•0次下载
高效、智能、稳定,漫途LoRa监测终端为光伏跟踪支架系统保驾护航
在光伏发电领域,光伏跟踪支架作为提高光伏系统发电效率的关键技术之一,已经得到了广泛的应用。然而,如何有效地监测光伏

高效、智能、稳定,LoRa监测终端为光伏跟踪支架系统保驾护航
在光伏发电领域,光伏跟踪支架作为提高光伏系统发电效率的关键技术之一,已经得到了广泛的应用。然而,如何有效地监测光伏

光伏储能变流器恒压恒流原理
对整个系统的运行至关重要。光伏储能变流器作为连接光伏阵列和储能电池的关键设备,其性能直接影响到系统的稳定性和效率。恒压恒流控制是光伏储能变流器的一种重要控制策略,本文将对恒压恒
多目标跟踪算法总结归纳
多目标跟踪是计算机视觉领域中的一个重要任务,它旨在从视频或图像序列中准确地检测和跟踪多个移动目标。不过在落地部署时,有一些关键点需要解决。

与光同行!天合跟踪开拓者1P赋能巴西520MW圣卢西亚项目
采用开拓者1P跟踪支架,并搭载SuperTrack智合智能跟踪算法。 天合跟踪是天合光能旗下智能跟踪解决方案提供商,具有20年






 工商网监
工商网监
评论