 利用脉冲沿可以帮助程序更加稳定
利用脉冲沿可以帮助程序更加稳定
今天给各位学员分享小文老师的开发经验:
关于如何更好的使用P_TRIG和N_TRIG指令。
P_TRIG:扫描信号上升沿
N_TRIG:扫描信号下降沿
一、沿的用法
其实在博图内,沿的用法有很多种,如下图:

但是小文老师更青睐于我们讲的这两款,主要有点在以下:
1、沿触发之前可以使用多个逻辑,形成沿触发
2、可以更加直观的看到沿是“TRUE”或者“FLASE”的状态,判断逻辑

我们先来说一下,哪些开发的情况下会使用这两个指令?
其实就是在写步进程序的时候,对于步数的转化,会使用沿指令; 还有在我们外部信号触发,例如你的传感器,可能会发生抖动,抖动严重的会导致制程序紊乱,对于这种抖动,我们采用“滤波”+“P_TRIG”,看下图:
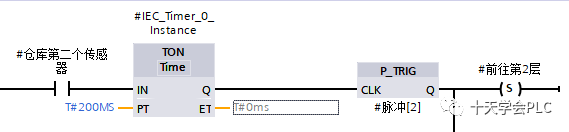
传感器闭合后,为了防止是误触发,采用一个定时器,定时器为200毫秒,当传感器的信号到达200毫秒后,触发沿,沿转移到下一个步序,这样的话,尽管你的传感器一直在抖动,也能有效的隔离在后面的判断逻辑之外,从而尽可能减小对程序的影响。

这是我在使用时的一些心得,当然也可以用于上电复位,上电后,或者调用FB后,用第一个扫描周期的沿,复位所有的状态和输出,保证我们每次使用FB时都是初始化过的FB!
二、避免用错沿 在使用时,P_TRIG的下方一般会有一个镜像寄存器,用来判断指令是否触发,如下图:
我们可以在DB中建立一个Array的数据类型,其中元素可以指定为20,个或者更多,属性为Bool型,也就是你有20个Bool类型的寄存器可以使用:
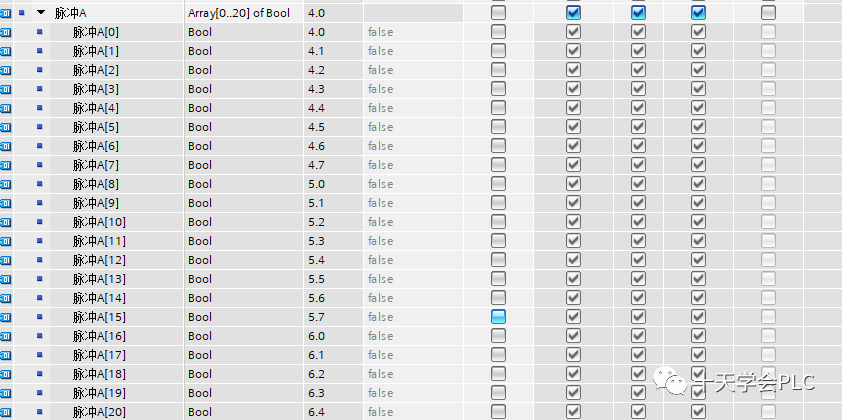
每次需要使用的时候,直接拖拽即可!非常方便,步进程序一步步往下写的话,很方便调用,也不担心用重复导致的动作不执行。
总结,更好的利用脉冲沿,可以帮助程序更加稳定,同时掌握良好的编程规则和习惯,有助于我们开发更为复杂的自动化系统!
审核编辑:刘清
-
传感器
+关注
关注
2546文章
50521浏览量
751332 -
寄存器
+关注
关注
31文章
5304浏览量
119901 -
定时器
+关注
关注
23文章
3235浏览量
114377
原文标题:十天独家:如何更好的使用P_TRIG指令和N_TRIG指令
文章出处:【微信号:十天学会PLC,微信公众号:十天学会PLC】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
2kV高稳定度高压脉冲电源设计
OPA857设计一个光脉冲捕获的前端遇到的疑问求解
jk触发器有圈是上升沿还是下降沿
OPA847做一个前置放大,怎样使输出光脉冲信号上升下降沿时间变小?
按键KEY1作为外部中断,分别测试上升沿和下降沿,发现触发方式和程序设置的方式对不上是为什么?
STM32H750如何采集2MHZ的波形是上升沿,并且在采集到上升沿的时候进行AD采样?
使用HAL库配置TIM2采集PWM测量频率和脉冲宽度,如果将边沿极性配置为上升+下降沿?
脉冲编码器输入信号有哪几种 | 编码器输出的脉冲信号有电压吗 | 脉冲编码器输入信号怎么调






 工商网监
工商网监
评论