 CMSIS_V1和CMSIS_V2有什么区别呢,该怎选择呢?
CMSIS_V1和CMSIS_V2有什么区别呢,该怎选择呢?
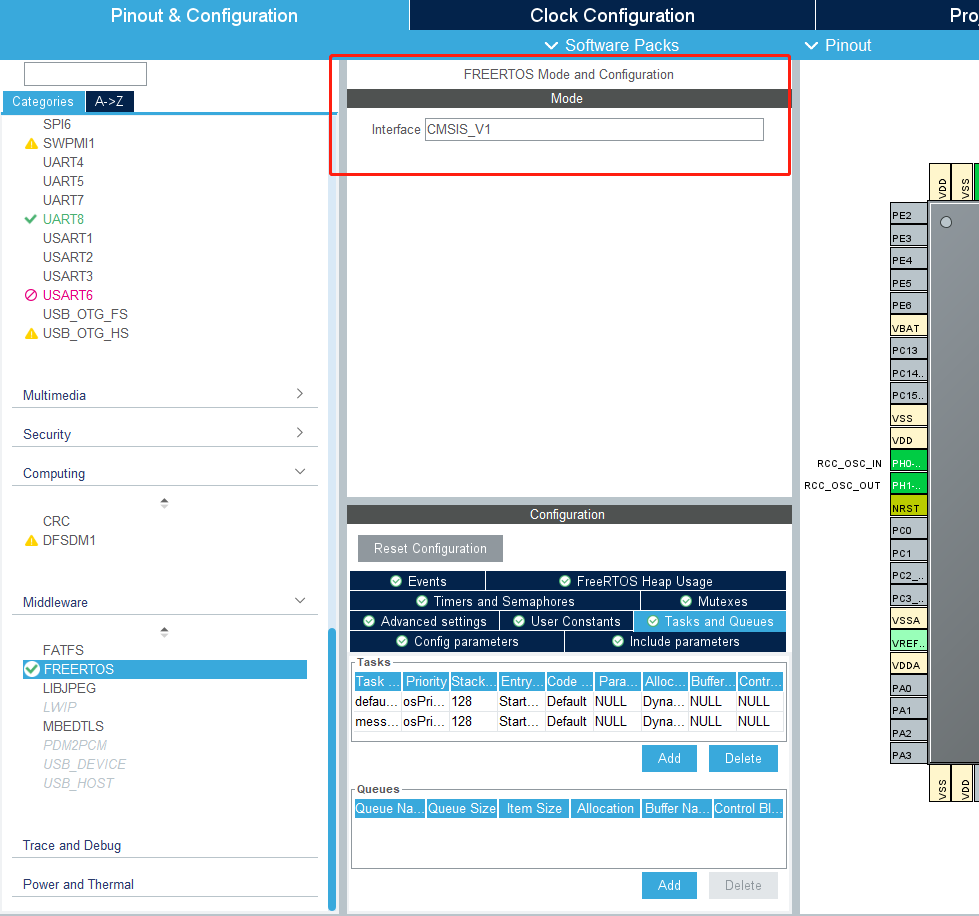
STM32CubeIDE在stm32开发者起着最基础的作用,在STM32CubeIDE中配置FreeRTOS中间层时需要选择interface,其中有三个选项:Disable、CMSIS_V1和CMSIS_V2
CMSIS定义了通用工具接口,并提供一致的设备支持,那么CMSIS_V1和CMSIS_V2有什么区别呢,该怎选择呢?
微控制器软件接口标准CMSIS
CMSIS ARM官方定义如下:
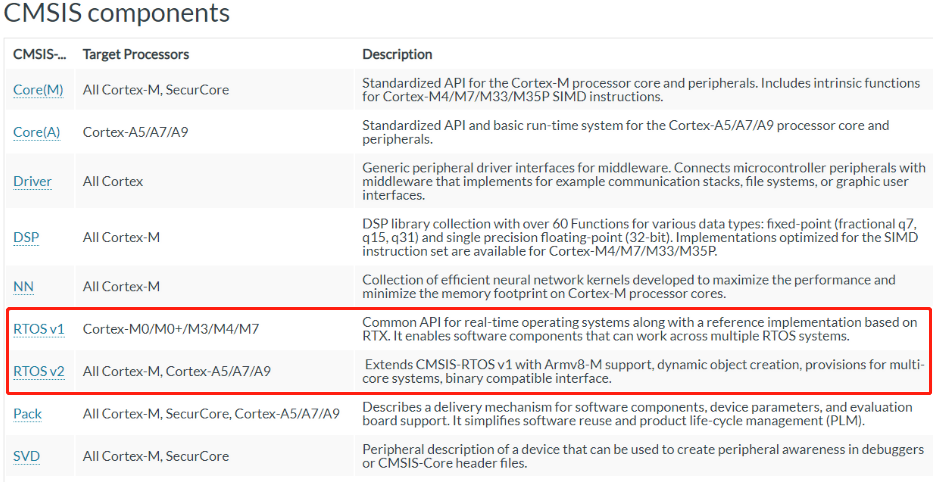
Cortex微控制器软件接口标准(CMSIS)是独立于供应商的硬件抽象层,用于基于Arm Cortex处理器的微控制器,并且CMSIS提供了到处理器和外围设备,实时操作系统以及中间件组件的接口,可以说非常实用。
CMSIS软件接口简化了软件重用,减少了开发周期,而且也不受限操作系统的类型,去耦。
不同之处
RTOS v1创建任务函数如下:
/***********************ThreadManagement*****************************/
/**
*@briefCreateathreadandaddittoActiveThreadsandsetittostateREADY.
*@paramthread_defthreaddefinitionreferencedwith
efosThread.
*@paramargumentpointerthatispassedtothethreadfunctionasstartargument.
*@retvalthreadIDforreferencebyotherfunctionsorNULLincaseoferror.
*@noteMUSTREMAINUNCHANGED:osThreadCreateshallbeconsistentineveryCMSIS-RTOS.
*/
osThreadIdosThreadCreate(constosThreadDef_t*thread_def,void*argument)
{
TaskHandle_thandle;
#if(configSUPPORT_STATIC_ALLOCATION==1)&&(configSUPPORT_DYNAMIC_ALLOCATION==1)
if((thread_def->buffer!=NULL)&&(thread_def->controlblock!=NULL)){
handle=xTaskCreateStatic((TaskFunction_t)thread_def->pthread,(constportCHAR*)thread_def->name,
thread_def->stacksize,argument,makeFreeRtosPriority(thread_def->tpriority),
thread_def->buffer,thread_def->controlblock);
}
else{
if(xTaskCreate((TaskFunction_t)thread_def->pthread,(constportCHAR*)thread_def->name,
thread_def->stacksize,argument,makeFreeRtosPriority(thread_def->tpriority),
&handle)!=pdPASS){
returnNULL;
}
}
#elif(configSUPPORT_STATIC_ALLOCATION==1)
handle=xTaskCreateStatic((TaskFunction_t)thread_def->pthread,(constportCHAR*)thread_def->name,
thread_def->stacksize,argument,makeFreeRtosPriority(thread_def->tpriority),
thread_def->buffer,thread_def->controlblock);
#else
if(xTaskCreate((TaskFunction_t)thread_def->pthread,(constportCHAR*)thread_def->name,
thread_def->stacksize,argument,makeFreeRtosPriority(thread_def->tpriority),
&handle)!=pdPASS){
returnNULL;
}
#endif
returnhandle;
}
RTOS v2创建任务函数如下:
osThreadId_tosThreadNew(osThreadFunc_tfunc,void*argument,constosThreadAttr_t*attr){
constchar*name;
uint32_tstack;
TaskHandle_thTask;
UBaseType_tprio;
int32_tmem;
hTask=NULL;
if(!IS_IRQ()&&(func!=NULL)){
stack=configMINIMAL_STACK_SIZE;
prio=(UBaseType_t)osPriorityNormal;
name=NULL;
mem=-1;
if(attr!=NULL){
if(attr->name!=NULL){
name=attr->name;
}
if(attr->priority!=osPriorityNone){
prio=(UBaseType_t)attr->priority;
}
if((prio< osPriorityIdle) || (prio >osPriorityISR)||((attr->attr_bits&osThreadJoinable)==osThreadJoinable)){
return(NULL);
}
if(attr->stack_size>0U){
/*InFreeRTOSstackisnotinbytes,butinsizeof(StackType_t)whichis4onARMports.*/
/*Stacksizeshouldbetherefore4bytealignedinordertoavoiddivisioncausedsideeffects*/
stack=attr->stack_size/sizeof(StackType_t);
}
if((attr->cb_mem!=NULL)&&(attr->cb_size>=sizeof(StaticTask_t))&&
(attr->stack_mem!=NULL)&&(attr->stack_size>0U)){
mem=1;
}
else{
if((attr->cb_mem==NULL)&&(attr->cb_size==0U)&&(attr->stack_mem==NULL)){
mem=0;
}
}
}
else{
mem=0;
}
if(mem==1){
#if(configSUPPORT_STATIC_ALLOCATION==1)
hTask=xTaskCreateStatic((TaskFunction_t)func,name,stack,argument,prio,(StackType_t*)attr->stack_mem,
(StaticTask_t*)attr->cb_mem);
#endif
}
else{
if(mem==0){
#if(configSUPPORT_DYNAMIC_ALLOCATION==1)
if(xTaskCreate((TaskFunction_t)func,name,(uint16_t)stack,argument,prio,&hTask)!=pdPASS){
hTask=NULL;
}
#endif
}
}
}
return((osThreadId_t)hTask);
}
正常V1够用了,普通功能选V1,高级功能选择V2:
我分别选择CMSIS_V1和CMSIS_V2编译了两次进行对比,CMSIS_V2都要大一些。
审核编辑 :李倩
-
微控制器
+关注
关注
48文章
7489浏览量
151051 -
cpu
+关注
关注
68文章
10825浏览量
211151 -
CMSIS
+关注
关注
0文章
39浏览量
11874
原文标题:stm32CubeIDE中CMSIS_V1和CMSIS_V2选项的区别
文章出处:【微信号:技术让梦想更伟大,微信公众号:技术让梦想更伟大】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
域名、IP 地址、网址分别是什么?有什么区别呢?
移植CMSIS-NN v6.0.0版本到VisionBoard

CMSIS-RTOS V1与V2的区别是什么?
CMSIS的DSP数字信号处理函数库应用

Nano100B Series BSP_CMSIS_V3.02.000包里的I2C_Loopback示例时失败了怎么解决?
Mini51DE_Series_BSP_CMSIS_v3.02.000为何在IAR中编译报错?
什么是SEPIC稳压器,他和升压稳压器有什么区别?
基于STM32自制CMSIS-DAP下载器
什么是干簧管呢?它跟霍尔元件有什么区别和联系呢?
电容屏和电阻屏有什么区别呢?






 工商网监
工商网监
评论