 如何理解超快载流子动力学的基础上实现功能
如何理解超快载流子动力学的基础上实现功能
摘要
石墨烯中的光电转换是实现超快和低功耗信息技术的核心。然而,揭示其机制和内在时间尺度需要未知的太赫兹电子和设备架构。近日,日本NTT研究所Katsumasa Yoshioka博士(一作兼通讯)团队通过片上超快光热电流的读出成功地揭示了高质量石墨烯中的光电转换过程。通过使用电阻氧化锌顶栅抑制电阻-电容器电路的时间常数,构建了一个带宽高达220 GHz的栅极可调的石墨烯光探测器。通过测量非局部动态光电流,他们发现从电极上提取的光电流是准瞬时的,并没有可测量的载流子通过几微米长的石墨烯,遵循了Shockley-Ramo定理。光电流产生的时间从0到 >4 ps可调,其起源被认为是与费米能级相关的带内载流子-载流子散射。研究结果填补了超快光学科学和器件工程之间的空白,加速了超快石墨烯光电子应用。
研究背景
随着数据流量继续呈指数增长,迫切需要将光信号转换为电信号的超高带宽和低功耗光接收器。光热电(PTE)石墨烯光探测器(PD)是用于光电 (O-E) 转换的最有希望的平台之一,这得益于其零暗电流操作、宽带吸收以及通过热载流子倍增(HCM)实现的高转换效率。石墨烯中的光电转换是实现预期的超高速和低功耗信息技术的核心原理。飞秒光泵-探针测量表明,光激发的非平衡载流子在载流子温度升高,然后温度通过各种声子相互作用在皮秒时间尺度上降低。由于这种超快能量弛豫,石墨烯PDs的dB带宽预计将超过200 GHz。然而,尽管在基于各种配置中的PTE效应构建超快石墨烯PDs方面做出了相当大的努力, 由于诸如示波器或频谱分析仪之类的读出电子器件的带宽限制,测得的带宽仅限于70 GHz。栅极对于费米能级的调控必不可少,然而栅电容的大电阻-电容电路时间常数使得截止频率低于100 GHz。因此,光电 (O-E) 转换的内在时间尺度很难实验观测,因此载流子萃取机理仍是未知,这两者都制约着超快石墨烯光电器件的实现。
在这项工作中,使用激光触发的光导(PC)开关在片上测量了从石墨烯PD中提取的超快PTE电流。使用高电阻氧化锌(ZnO)作为顶栅极,将RC时间常数降至最低。成功地演示了带宽高达220 GHz的石墨烯PD。这表明已经突破了跟踪内在时间尺度的O-E转换的带宽限制。
为了全面了解石墨烯中的O-E转换机制,我们深入研究了不同石墨烯样品的非局部动态光电流,封装在六方氮化硼(hBN)中的石墨烯费米能量EF可调且具有不同载流子迁移率(μ)和沟道长度(L)。光激发后,O–E转换通过四个阶段进行:(1)非平衡光激发载流子通过带内HCM热化,持续时间取决于费米能级介于即时(光激发期间)和~4 ps之间;(2)热化完成后,PTE效应产生光电电压;(3)依据Shockley-Ramo型响应,在没有载流子传输时间下光电流立即流过源-漏电极;(4)光电流通过载流子冷却衰减,并且由于超共振(SC)冷却,具有较低迁移率的样品显示出更快的衰减速度。由于器件中的RC时间常数可以忽略不计,以及Shockley-Ramo型响应,测得的光电流直接跟踪载流子温度的发展和演变,使我们能够解决石墨烯中共存的多种热化和冷却途径。实现了上述O-E转换过程的定量理解,为超快石墨烯光电器件的设计奠定了基础。
这里首先介绍用于超快电学读数的实验设置。然后,我们通过测量非局部动态光电流来讨论石墨烯PD中光电压产生和载流子传输的时间。接下来,我们描述了光电流衰减机制。最后,我们讨论电学读数和一般用于推断石墨烯PD的时间尺度光电读数之间的区别。
实验设置
实验测试的基本框架如图1a所示。通过带有ZnO顶栅极和钛/金(Ti/Au)源漏接触的制造了hBN封装的高质量单层石墨烯晶体管。氧化锌栅极设计为在GHz和THz范围内保持透明,因此,对于超快的电学读数由栅极电容引起的RC时间常数可以忽略不计(参见补充部分1b)。我们制造了四个具有不同石墨烯通道长度(L = 5 μm(两个样品),10 μm和15 μm)和载流子迁移率(μ = 11, 000–140, 000 cm2V−1s−1)的样品(补充材料第2a节)。用沟道长度来指代这四个样品,即5 μm (1),5 μm (2)、10 μm和 15 μm。如图1a的插图所示,形成高宝线波导的Ti/Au电极连接到低温生长的砷化镓(LT-GaAs)PC开关。注意,高宝线因不会产生石墨烯与波导之间的模干扰和模耦合的复杂性很适合用来研究O-E转换过程。我们使用脉冲飞秒激光器进行了泵浦探针实验,脉冲持续时间为280 fs。该光束分为泵波束和探针光束,分别激发石墨烯和PC开关,并控制时间延迟以测量时域中的光电流。泵浦光束使用物镜紧紧聚焦在石墨烯上,以进行扫描光电流显微镜检查。我们选择的激光波长值为 517 nm,以获得更好的聚焦和更高的信噪比,1035 nm 的值为精确的费米级调谐,以避免非必要的光诱导掺杂(补充材料第2b节)。
图1b,c分别为样品5 μm (2)的光学图像以及零源漏偏置电压(VSD)下的相应扫描光电流图像。在两个石墨烯-金属界面处有相反的最大光电电流,这是PTE电流的特征(详细信息见补充材料方法)。在整个实验过程中,保持VSD = 0 V,聚焦于PTE效应引发的O-E转换。图1d显示了样品5 μm (1) (µ= 11, 000 cm2V−1s−1) 和样品5 μm (2) (µ= 140, 000 cm2V−1s−1)的时间分辨光电流。傅里叶变换表明,样品5 μm (1)的3 dB带宽达到220 GHz(图1e),表明RC时间常数的截止频率高于220 GHz,以及我们系统研究超快动态O-E转换过程的能力。另一方面,样品5 μm (2)的载流子迁移率比样品5 μm (1)高一个数量级,其带宽则窄至 51 GHz。这表明载流子迁移率对带宽有很大的影响。在下文中,我们更为全面的研究了超快O-E转换背后的内在机制,包括其与费米能级、迁移率、源漏沟道长度和泵点位置的相关性。
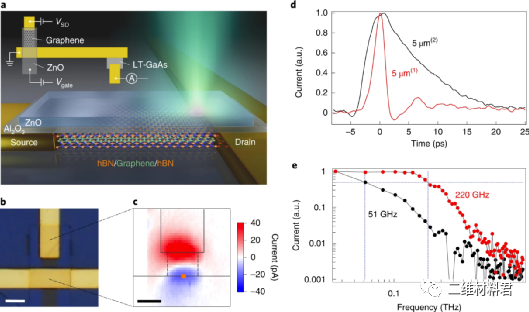
图1 a, 器件结构示意图。采用ZnO顶栅极设计,以最小化RC时间常数和控制hB封装石墨烯的费米能级。超快光电流从连接高宝线波导漏极提取,并通过使用泵-探头方法测量LT-GaAs PC 开关处的波形得到。b, 沟道长度为5μm的石墨烯器件的光学图像。比例尺,10 μm。 c,扫描 b 的光电流图像。电流是在瞬态光电流的峰值处获得的。比例尺,5 μm。d, 在泵位置处(用橙色圆圈在c中表示),样品5 μm (1) 和5 μm (2)中光电流的时间分布。为清楚起见,每个波形都归一化为最大峰值电流,时间原点设置为当前峰值。e,从d中的波形获得的归一化傅里叶变换光谱。样品5 μm (1) 和5 μm (2) 的3 dB 带宽分别为 220 GHz和 51 GHz。实验参数:VSD = 0 V, Vgate= 0 V, λlaser= 517 nm, 泵功率,Plaser= 0.1 mW。
实验结果
可调热化和瞬时光电流。首先,我们关注O-E转换的早期阶段,即迁移率为 (µ= 140, 000 cm2V−1s−1)且沟道长度为5 μm样品中的光电流的产生,即具有最高迁移率的样品5 μm (2)。图2a为不同栅极偏置电压Vgate下样品的测试波形。峰值电流随Vgate变化(图 2a 的插图)并在EF= −0.07 eV附近达到最大值,这与Vgate 与塞贝克系数依赖关系一致,S ∝ dσ/dVgate,其中σ是石墨烯的电导率。这种非单调行为是PTE效应的特征,而光伏效应应表现出光电流随Vgate的单调增加。最值得注意的是,如图2b所示,随着费米能级向电荷中性点(CNP)靠近,光电流的峰值位置移动到~4 ps的较大值。注意到,最小掺杂的负光电流可能是最近观察到的CNP光电流(补充第3节)。一般倾向于用石墨烯中的载流传输时间产生的来解释光电流产生的实质性延迟,这被认为限制了石墨烯PD的带宽。然而,我们在下文验证了光电流生成的延迟是由于CNP附近的载流子热化时间慢,并非石墨烯中的载流子传输时间。
为了揭示延迟的原因,我们通过激发不同的位置(与上部或下部接触界面)和具有不同长度和迁移率的样品来评估非局部光电流动态提取,如图2c所示。在三种配置中,相应的峰移和Vgate变化关系的落在一条曲线上(图2d)。这种重叠表明石墨烯PD中的载流子输运不是延迟的原因,而是准瞬时的(小于或与280 fs的泵脉冲持续时间相当),如图2d的插图所示,这与饱和速度5.5×105 ms−1沟道长度L = 10 μm样品的载流子传输时间为~18 ps的结果不一致。这种准瞬时响应可以用Shockley-Ramo定理来解释。在石墨烯等导电材料中,当载流子进入接触电极时,会立即产生光电流,而光激发载流子本身会迁移到半导体中的接触电极。在前一种情况下,光电流响应的时间尺度由远程电场的筛选时间决定。这个Shockley-Ramo响应时间比载流子的传输时间短得多,预计在L = 10μm时约为300 fs。这表明载流子传输时间与石墨烯PD的带宽无关,这对于开发超快PD非常有利。
延迟的另一个可能原因是热化引起的光电压发展为具有升高的载流子温度的费米-狄拉克分布的时间。在石墨烯中,消散到声子系统的能量对PTE电流没有贡献,因为电子热容量比晶格小几个数量级,因此光电流的上升时间由载流子-载流子散射决定。由于相位空间有限,带内载流子散射很小,除了非常接近CNP时带内载流子散射主导热化动力学(补充材料第3节)。为了定量讨论带内散射对热化动力学的影响,我们通过上升和衰减时间的指数拟合了光电流的上升时间,如图2e所示(详细过程见补充材料第4节)。在|EF|>0.12 eV之上,上升时间由泵脉冲的持续时间决定,并随着|EF|的减小而增大,在 CNP 附近超过4 ps。这类慢响应可以通过热化过程中对于更小的|EF|,每个带内散射事件的能量损失(∆E)较小来解释。也就是说,需要更多的散射事件来热化更小的|EF|(图2e的插图),因为光激发载流子和费米势中的载流子之间交换的能量∆E≈|EF|。这个级联步骤导致二次电子-空穴对的数量和E0/|EF|成比例的HCM,其中 E0是激发能(E0/|EF|≫ 1)。HCM模型,认为热化时间(Δt)与费米能量的平方倒数成正比,Δt = α(E0/EF)/EF(α = 7.9 ±0.3 eV ps),与实验结果吻合良好。上升时间的可调范围比使用太赫兹脉冲的带内吸收观察到的范围大一个数量级(从立即到~0.4 ps)。O–E转换的巨大可调谐性对于超快信号处理非常有用。我们注意到,观察可调光电流的产生并确定其来源成为可能,因为能够用可忽略不计的RC时间常数测量非局部超快光电流,这是我们的方法所独有的。
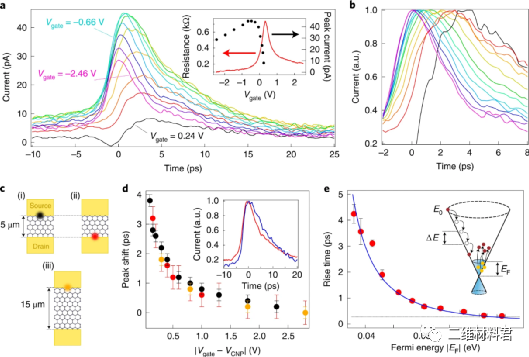
图2 a,不同栅极偏置电压Vgate下迁移率为 µ= 140, 000 cm2V−1s−1的样品5 μm (2)中光电流的时间分布,时间原点设置为Vgate= −2.46 V 的峰值处。插图为相应的峰值电流(黑色圆圈)和两端电阻(红色曲线)。b,峰位置附近的图a的归一化波形,强调了栅压引起的峰位移。c, 用于测量非局部光电流提取动力学的实验设置(i)–(iii)。a 是使用配置 (i) 获得的。d,从c中的每个配置中提取的峰值偏移,这些值显示从|Vgate − VCNP |= 2.8 V的相对延迟。误差来自于峰值位置的不确定性。插图显示了使用样品 10 μm 通过泵浦上部(红色)和下部(蓝色)石墨烯-金属界面 (Vgate= 0 V, λlaser= 517 nm)。VCNP,电荷中和点的电压。e,光电流的上升时间和费米能级的关系。蓝色曲线显示了使用 HCM 模型获得的最佳拟合,可调缩放常数α = 7.9 ± 0.3 eV ps。水平虚线表示泵脉冲的脉冲持续时间。插图:HCM过程的示意图。ΔE 是每步的能量损失,ΔE ≈ |EF|.数据显示为拟合系数,垂直误差对应于估计的标准差。水平误差是由于栅极电容的不确定性造成的。实验参数:VSD= 0 V, λlaser= 1,035 nm 和 Plaser= 0.1 mW。
冷却的迁移率依赖性。接下来,我们将讨论通过降低载流子温度引起的光电流衰减。我们注意到,由于PTE效应,Shockley-Ramo响应和可忽略不计的RC时间常数,光电流直接跟踪载流子温度的时间演变轨迹。已知由于大塞贝克系数,石墨烯 PD 的响应度在高迁移率器件中会增大。另一方面,迁移率对冷却时间的影响尚未定量研究。使用相同衬底和费米能级(EF= −0.05 eV)的具有不同迁移率的四个样品进行系统的研究,结果表明迁移率是调整冷却时间的关键参数(图 3a)。对于迁移率较低的样品,观察到更快的衰变。这种行为可以通过无序辅助的SC冷却来解释,其中载流子与声子和杂质之间发生三体碰撞。如图3b的底部所示,迁移率为μ<51,000 cm2V−1s−1(样品 15 μm)的衰减时间使用SC预测进行合理解释(补充材料第5节)。迁移率为140,000 cm2V−1s−1的样品5 μm(2)中的衰减时间远低于SC预测,这表明存在另一种方式主导这种迁移率样品的载流子冷却。该样品中衰减时间对EF的依赖性(补充材料图7)表明耦合到hBN基板中的双曲声子在高高掺杂时占主导地位。在掺杂时,衰减缓慢,双曲声子的作用很弱,光学声子可能是另一个主要的冷却途径。图3b的顶部给出了使用Mott公式计算的塞贝克系数来估计响应度。我们注意到,获得的塞贝克系数高达350±40 μV K−1,这在各种石墨烯 PD 中是非常高的,得益于hBN封装使器件具有很高的载流子迁移率。尽管在带宽和响应度之间需要折中,但具有皮秒衰减的大塞贝克系数表明hBN封装的石墨烯具有优异的性能。这些结果为探索石墨烯PD的潜在应用提供了重要信息。
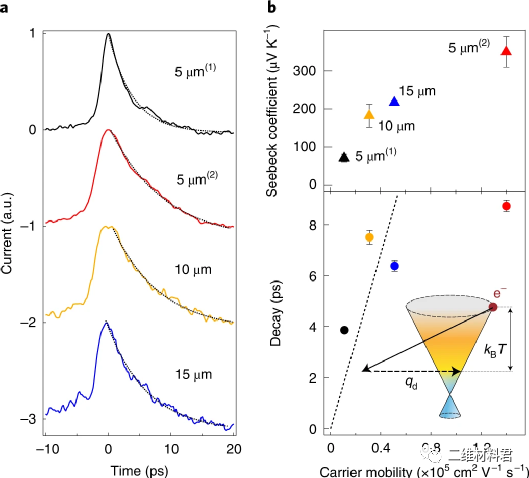
图3 a,使用不同样品获得的光电流的时间分布。对于所有样品,费米能级设置为EF= −0.05 eV。黑色虚线曲线显示指数函数的最佳拟合。b, 顶部:在 EF= −0.05 eV时计算的塞贝克系数(补充材料第 2a 节)。底部:从a获得的不同样品的衰变常数与载流子迁移率的关系。数据显示为拟合系数,误差对应于估算的标准差。虚线表示使用可调参数变形电位D = 27 eV计算的SC冷却时间(补充材料第5节)。插图显示了 SC 冷却的示意图。由于无序(q)对动量限制的松弛,通过发射高能 (kBT)声子是的快速冷却成为可能。实验参数:VSD= 0 V, λlaser= 1,035 nm 和 Plaser= 0.1 mW。kB,玻尔兹曼常数,T,温度,e-,电子。
电读数vs光电读数的衰减。光电读数是另一种用于测量各种飞秒泵浦-探针技术中超快光电流响应的方法,最后我们通过将电气读数与常用的光电读数进行比较,进一步证明了电气读数的优势。图4a给出了两种方法的示意图。在光电读数中,石墨烯使用两个激光脉冲激发,并且光电流衰减作为它们之间延迟的函数来测量。由于光电流与泵强度呈非线性比例,因此当两个泵脉冲重叠时,光电流成比例地减小。然后,将衰减常数监测为光电流的恢复时间。虽然这种局部自相关技术可实现高达50 fs以下的超快时间分辨率,它不能测量非局部光电流动力学,例如从电极中提取的光电流。此外,从测量的衰减常数推导出的物理量具有挑战性,因为它需要假设取决于实验条件系统的非线性响应,例如泡利阻塞,与温度相关的电子热容量,和俄歇复合。
图4b比较了通过电和光电读数获得的两个样品(5μm(1)和5 μm (2))的光电流衰减。在迁移率较低的石墨烯中(样品5μm(1),μ = 11,000 cm2V−1s−1),两种读出方法给出了相似的衰减时间(图4b中的上部曲线)。相比之下,在样品中为5 μm (2) (µ= 140,000 cm2V−1s−1),电读数的衰减时间比光电读数慢(图4b中的下部曲线)。电读出和光电读数之间的差异可能来自两种方法的敏感能量区域的差异。电读出的信号将比光电读数的信号更多地反映低能量区域,因为当产生的光电流通过触点进行电探测时,直流分量被包括在内。事实上,微观第一性原理计算已经预测无缺陷石墨烯中低能区域的载流子占用的衰减较慢。相比之下,在低迁移率石墨烯中,SC冷却将通过加速低能量区域的衰变来补偿能量依赖性衰变时间,因为它可以有效地松弛能量低于光学和双曲声子(~0.2 eV)的电子。这些结果进一步表明,直接读出光电流对于理解O-E转换过程至关重要,从而评估石墨烯PD的性能。
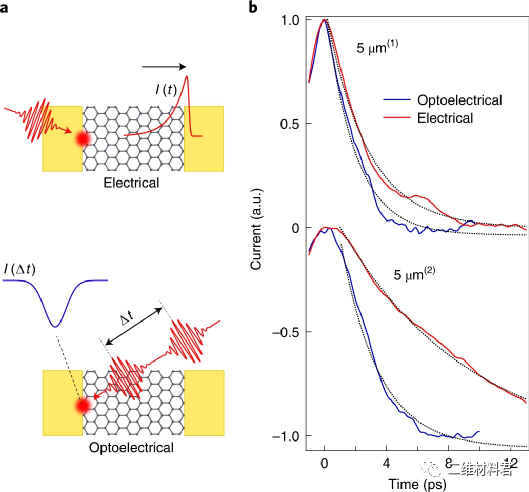
图4 a, 两种不同方法的示意图。电读数直接测量从漏极触点(I(t))提取的超快光电流。光电读数测量焦点处光电流的局部非线性响应,作为两个泵浦脉冲(I(Δt))之间延迟的函数。b,使用电学和光电方法测量的光电流的时间分布,样品5 μm (1)μ = 11,000 cm2V−1s−1(上部曲线)和 5 μm(2)μ = 140,000 cm2V−1s−1(下部曲线)。黑色虚线曲线显示指数函数的最佳拟合。为清楚起见,每个波形按最大峰值电流归一化。实验参数:VSD= 0 V、Vgate = 0 V, λlaser= 517 nm 和 Plaser= 0.1 mW。
讨论
我们演示了基于PTE的石墨烯PD中光电流的超快非局部电读数。通过将片上太赫兹光谱和门可调谐器件与抑制的RC时间常数相结合,我们成功地解决了具有内在时间尺度的石墨烯中的O-E转换过程。与预期结果相反,我们发现光电流产生的时间是可调的,从大费米能级处的立即响应到接近CNP时>4 ps,这是由可调谐的带内HCM对光兴奋载流子的热化确定的。我们还发现,根据Shockley-Ramo定理,PD上的光电流响应是准瞬时的,没有载流子传输时间。一旦达到热化,光电流就会通过声子相互作用降低载流子温度而衰减。由于准瞬时光电流和可忽略不计的RC常数,我们的方法通过直接跟踪载流子温度的时间演变来作为石墨烯的超快温度。这使我们能够更深入地了解石墨烯中的O-E转换机制。克服带宽限制和对O-E转换过程的定量理解可以应用于任何基于PTE的石墨烯PD,并将为石墨烯光电器件的设计设定新的标准。此外,我们在这里开发的平台可以很容易地扩展到二维范德华材料及其异质结构,以研究通过特殊的层间耦合实现的O-E转换的关键超快过程,例如层间热载流子动力学,层间激子和移位电流。我们的片上超快电读出技术展示了如何理解超快载流子动力学的基础上实现功能(超快O-E转换),从而消除了超快光学科学与器件工程之间的障碍,这有利于超快光电应用的发展。
-
电容器
+关注
关注
64文章
6224浏览量
99699 -
石墨烯
+关注
关注
54文章
1552浏览量
79659 -
动力学
+关注
关注
0文章
105浏览量
16975 -
光电流
+关注
关注
0文章
19浏览量
7885
原文标题:石墨烯光电探测器中的超快本征光电转换动力学
文章出处:【微信号:二维材料君,微信公众号:二维材料君】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
电力拖动系统的动力学课件
[下载]想了解多体动力学软件吗?有教程分享及免费试用下载
基于多体系统动力学的空气悬架大客车平顺性试验仿真研究
飞行器动力学参数在线辨识EKF算法实验流程
分布式驱动电动汽车的动力学控制有哪几种类型?常见问题是什么?
热分析动力学
水下机器人技术解析之水动力学系数
电动力学或经典电动力学统称为什么?
机械动力学原理.pdf
激发态动力学第一性原理计算软件Hefei-NAMD
基于车辆动力学模型的横向控制






 工商网监
工商网监
评论