 Linux驱动开发-编写(EEPROM)AT24C02驱动
Linux驱动开发-编写(EEPROM)AT24C02驱动
【摘要】 AT24C02是IIC接口的EEPROM存储芯片,这颗芯片非常经典,百度搜索可以找到非常多的资料,大多都是51、STM32单片机的示例代码,大多采用模拟时序、裸机系统运行。当前文章介绍在Linux系统里如何编写AT24C02的驱动,并且在应用层完成驱动读写测试,将AT24C02的存储空间映射成文件,在应用层,用户可以直接将AT24C02当做一个普通文件的形式进行读写,偏移文件指针;在Linux内核
1. 前言
AT24C02是IIC接口的EEPROM存储芯片,这颗芯片非常经典,百度搜索可以找到非常多的资料,大多都是51、STM32单片机的示例代码,大多采用模拟时序、裸机系统运行。当前文章介绍在Linux系统里如何编写AT24C02的驱动,并且在应用层完成驱动读写测试,将AT24C02的存储空间映射成文件,在应用层,用户可以直接将AT24C02当做一个普通文件的形式进行读写,偏移文件指针;在Linux内核里有一套标准的IIC子系统框架专门读写IIC接口设备,采用平台设备模型框架,编写驱动非常方便。
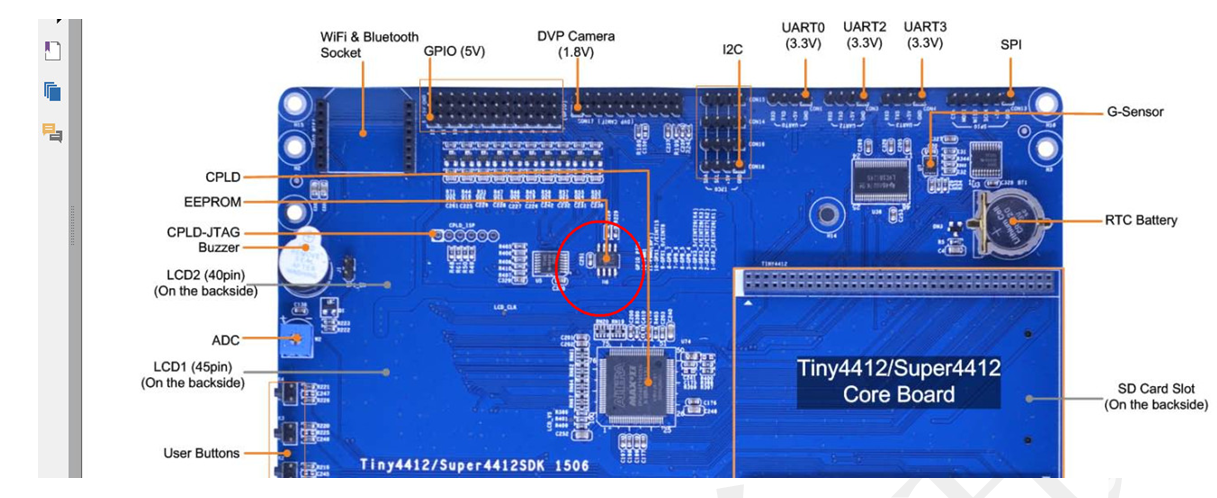
当前开发板采用友善之臂的Tiny4412,CPU是三星的EXYNOS4412,4412是三星的第一款四核处理器,主频是1.5GHZ,稳定频率是1.4GHZ。
2. 硬件原理图
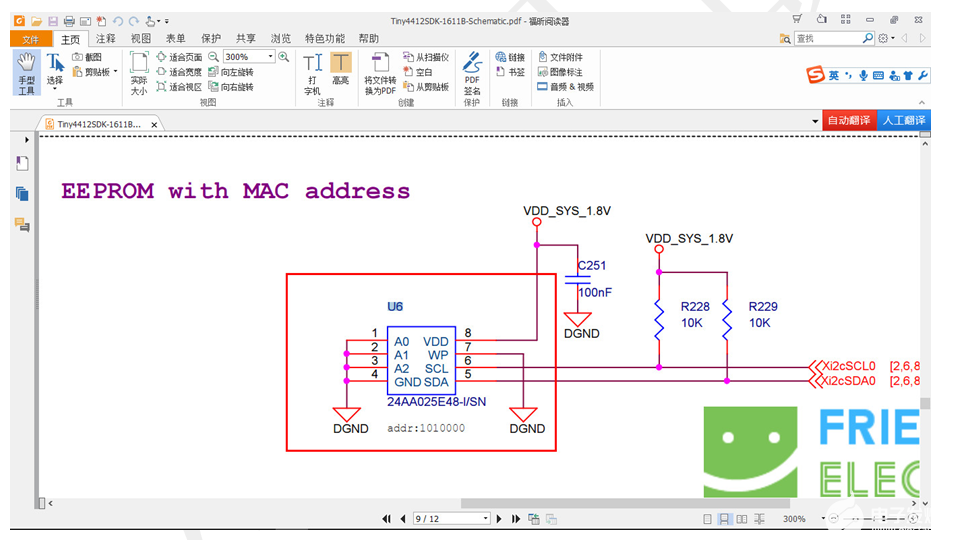
当前的开发板上自带了一颗EEPROM存储芯片(具体型号是24AA025E48,代码与AT24C02一样的),原理图如下:
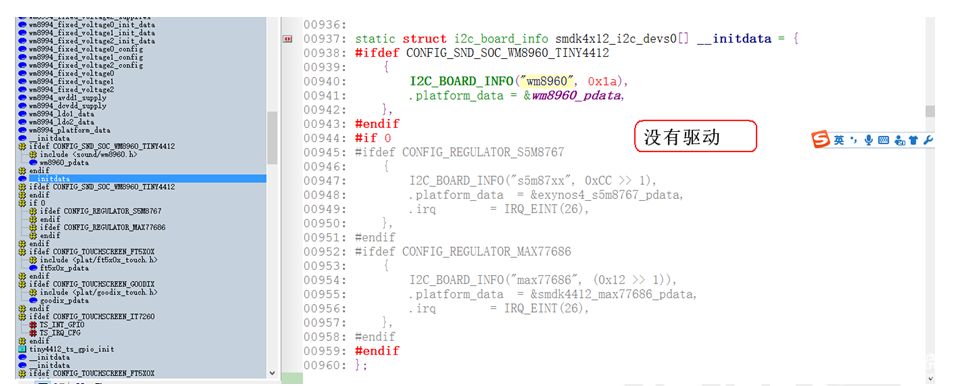
自带的内核里没有内置EEPROM的驱动:
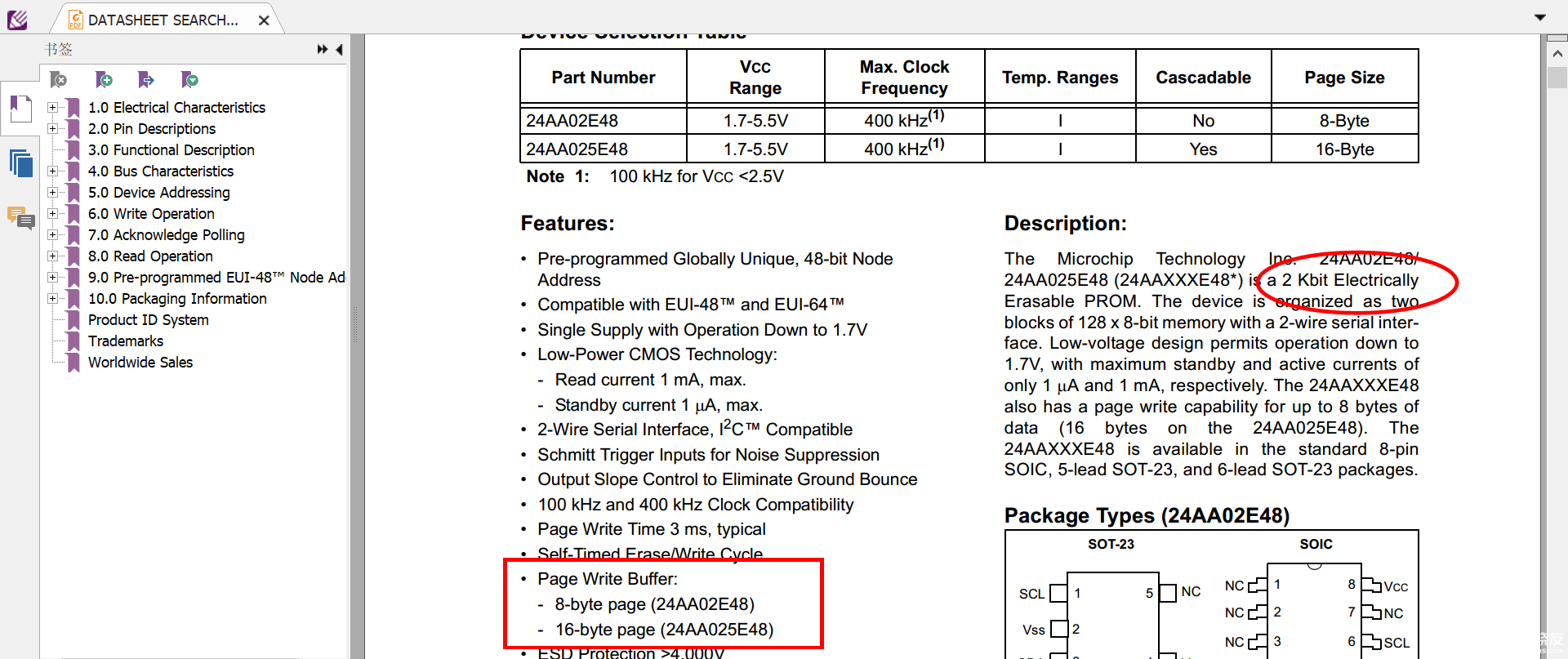
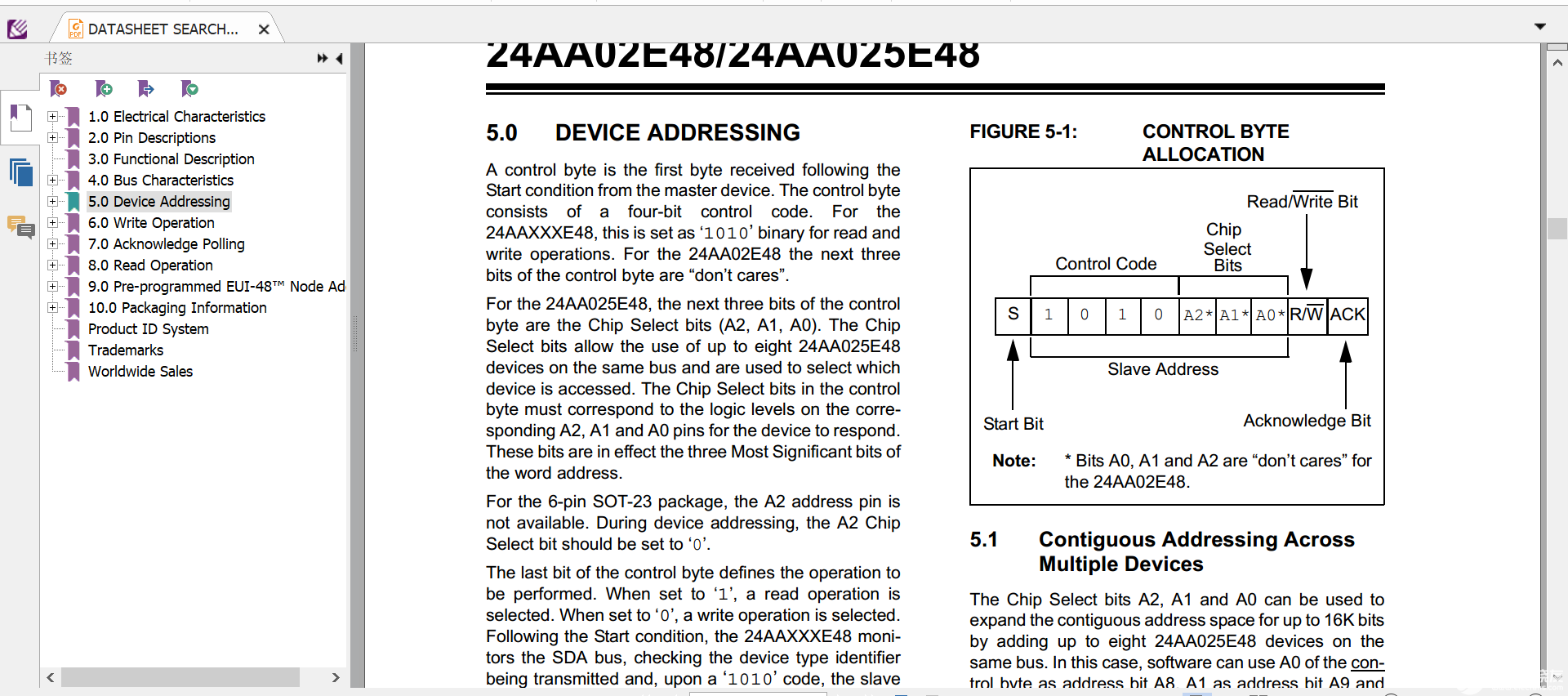
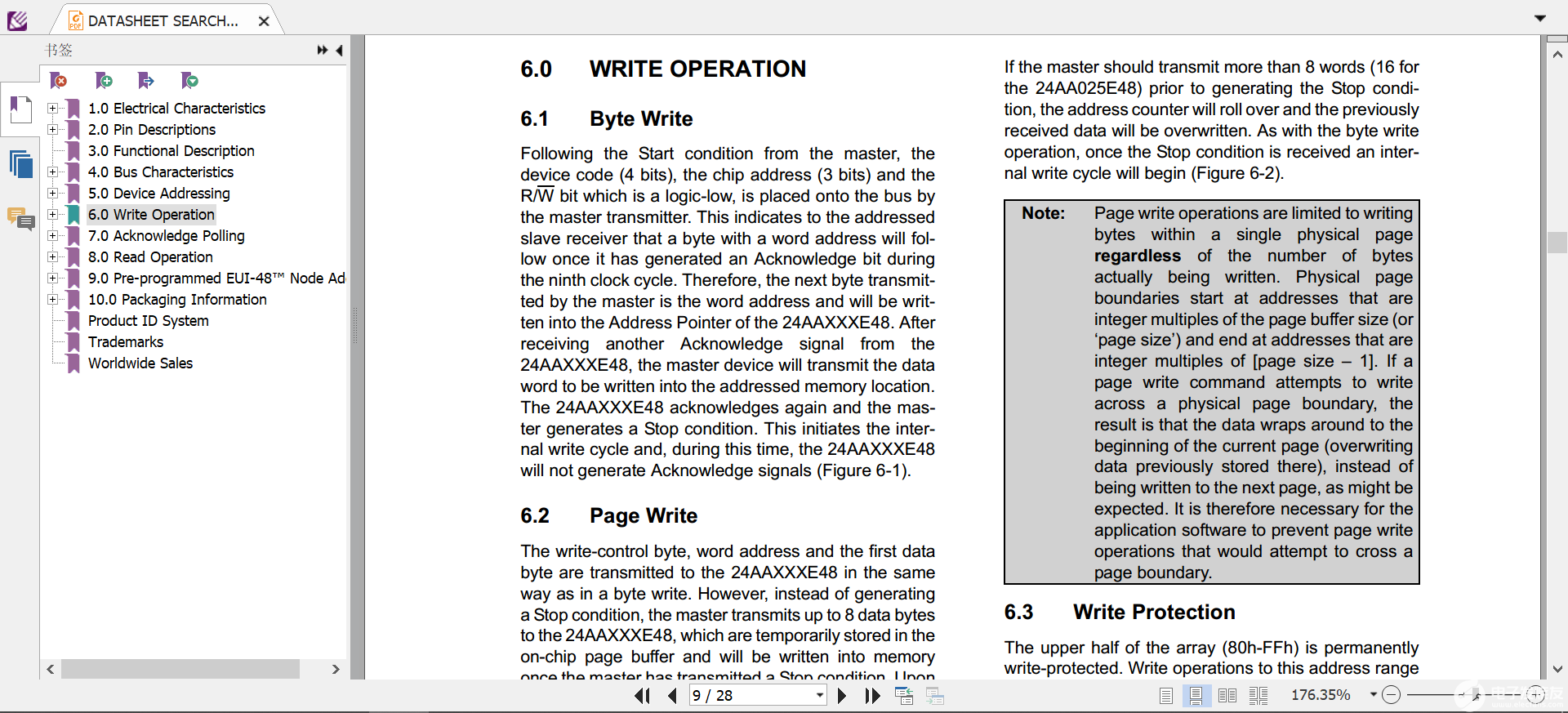
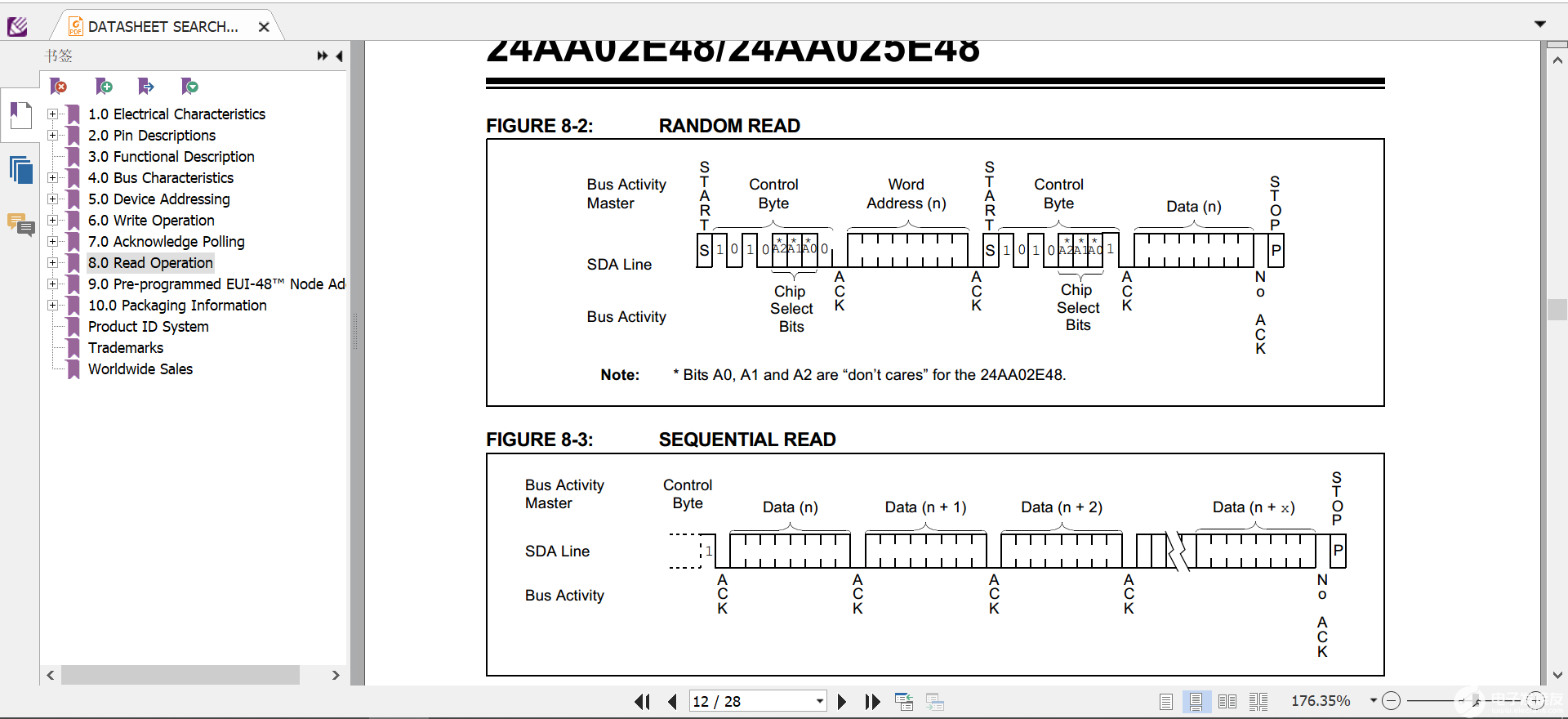
存储芯片的数据手册介绍:
设备地址:
写字节、页写时序:
读数据时序:
3. 示例代码
3.1 EEPROM驱动端代码
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
static struct work_struct work;
static struct i2c_client *eeprom_client;
#define MAX_SIZE 255 //EEPROM大小
#define EEPROM_PAGE 16 //页字节大小
static u8 eeprom_buff[255];
static int tiny4412_open(struct inode *inode, struct file *file)
{
printk("tiny4412_open-->ok\n");
return 0;
}
static ssize_t tiny4412_read(struct file *file, char __user *buf, size_t size, loff_t *seek)
{
unsigned long err;
//判断位置是否超出范围
if(*seek+size>MAX_SIZE)
{
size=MAX_SIZE-*seek;
}
//读取数据
i2c_smbus_read_i2c_block_data(eeprom_client,*seek,size,eeprom_buff);
err=copy_to_user(buf,eeprom_buff,size);
if(err!=0)return -1;
*seek+=size;
return size;
}
static ssize_t tiny4412_write(struct file *file, const char __user *buf, size_t size, loff_t *seek)
{
size_t write_ok_cnt=0;
unsigned long err;
err=copy_from_user(eeprom_buff,buf,size);
if(err!=0)return -1;
//判断位置是否超出范围
if(*seek+size>MAX_SIZE)
{
size=MAX_SIZE-*seek;
}
int write_byte=0;
u8 *write_p=eeprom_buff;
while(1)
{
if(size>EEPROM_PAGE)
{
write_byte=EEPROM_PAGE;
size-=EEPROM_PAGE;
}
else
{
write_byte=size;
}
//写数据
i2c_smbus_write_i2c_block_data(eeprom_client,*seek,write_byte,write_p);
*seek+=write_byte;
write_p+=write_byte;
write_ok_cnt+=write_byte; //记录写成功的字节数
//等待写完成
msleep(10);
if(write_byte==size)break; //写完毕
}
return write_ok_cnt;
}
/*
filp:待操作的设备文件file结构体指针
off:待操作的定位偏移值(可正可负)
whence:待操作的定位起始位置
返回:返回移位后的新文件读、写位置,并且新位置总为正值
定位起始位置
SEEK_SET:0,表示文件开头
SEEK_CUR:1,表示当前位置
SEEK_END:2,表示文件尾
*/
static loff_t tiny4412_llseek(struct file *filp, loff_t offset, int whence)
{
loff_t newpos = 0;
switch(whence)
{
case SEEK_SET:
newpos = offset;
break;
case SEEK_CUR:
newpos = filp->f_pos + offset;
break;
case SEEK_END:
if(MAX_SIZE+offset>=MAX_SIZE)
{
newpos=MAX_SIZE;
}
else
{
newpos = MAX_SIZE + offset;
}
break;
default:
return -EINVAL;//无效的参数
}
filp->f_pos = newpos;
return newpos;
}
static int tiny4412_release(struct inode *inode, struct file *file)
{
printk("tiny4412_release-->ok\n");
return 0;
}
static struct file_operations fops=
{
.open=tiny4412_open,
.read=tiny4412_read,
.write=tiny4412_write,
.release=tiny4412_release,
.llseek=tiny4412_llseek
};
/*
Linux内核管理驱动---设备号
设备号是一个unsigned int 的变量--32位。
设备号=主设备号+次设备号
*/
static struct miscdevice misc=
{
.minor = MISC_DYNAMIC_MINOR, /*次设备号填255表示自动分配 主设备号固定为10*/
.name = "tiny4412_eeprom", /*/dev目录下文件名称*/
.fops = &fops, /*文件操作接口*/
};
static int tiny4412_probe(struct i2c_client *client, const struct i2c_device_id *device_id)
{
printk("probe调用成功:%#X\n",client->addr);
eeprom_client=client;
/*1. 杂项设备的注册函数*/
misc_register(&misc);
return 0;
}
static int tiny4412_remove(struct i2c_client *client)
{
/*2. 杂项设备的注销函数*/
misc_deregister(&misc);
printk("remove调用成功.\n");
return 0;
}
static struct i2c_device_id id_table[]=
{
{"tiny4412_eeprom",0},
{}
};
static struct i2c_driver drv=
{
.probe=tiny4412_probe,
.remove=tiny4412_remove,
.driver=
{
.name="eeprom_iic"
},
.id_table=id_table
};
static int __init tiny4412_drv_init(void)
{
/*注册IIC驱动端*/
i2c_add_driver(&drv);
printk("IIC驱动端: 驱动安装成功\n");
return 0;
}
static void __exit tiny4412_drv_cleanup(void)
{
/*注销IIC驱动端*/
i2c_del_driver(&drv);
printk("IIC驱动端: 驱动卸载成功\n");
}
module_init(tiny4412_drv_init); /*驱动入口--安装驱动的时候执行*/
module_exit(tiny4412_drv_cleanup); /*驱动出口--卸载驱动的时候执行*/
MODULE_LICENSE("GPL"); /*设置模块的许可证--GPL*/
3.2 EEPROM设备端代码
#include
#include
#include
#include
#include
#include
#include
static struct i2c_client *i2c_dev=NULL;
static struct i2c_adapter *adap=NULL;
static struct i2c_board_info info=
{
.type="tiny4412_eeprom",
.addr=0x50, /*设备地址*/
};
static int __init tiny4412_drv_init(void)
{
/*根据总线编号获取是适配器*/
adap=i2c_get_adapter(0);
/*注册IIC设备端*/
i2c_dev=i2c_new_device(adap,&info);
printk("IIC设备端: 驱动安装成功\n");
return 0;
}
static void __exit tiny4412_drv_cleanup(void)
{
/*注销IIC设备*/
i2c_unregister_device(i2c_dev);
i2c_put_adapter(adap);
printk("IIC设备端: 驱动卸载成功\n");
}
module_init(tiny4412_drv_init); /*驱动入口--安装驱动的时候执行*/
module_exit(tiny4412_drv_cleanup); /*驱动出口--卸载驱动的时候执行*/
MODULE_LICENSE("GPL"); /*设置模块的许可证--GPL*/
3.3 应用层测试代码
#include
#include
#include
#include
#define EEPROM_DEV "/dev/tiny4412_eeprom"
int main(int argc,char **argv)
{
/*1. 打开设备文件*/
int fd=open(EEPROM_DEV,O_RDWR);
if(fd<0)
{
printf("%s 设备驱动打开失败.\n",EEPROM_DEV);
return 0;
}
/*3.读写数据*/
unsigned char buff[255];
int cnt;
int i;
for(i=0;i<255;i++)buff[i]=i;
cnt=write(fd,buff,255);
printf("write成功:%d Byte\n",cnt);
//偏移文件指针
lseek(fd,SEEK_SET,0);
unsigned char buff_r[255];
cnt=read(fd,buff_r,255);
printf("read成功:%d Byte\n",cnt);
for(i=0;i;i++)>
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
驱动
+关注
关注
12文章
1851浏览量
85531 -
EEPROM
+关注
关注
9文章
1033浏览量
81890 -
AT24C02
+关注
关注
0文章
79浏览量
24324
发布评论请先 登录
相关推荐
数据保存100年!纳祥科技国产EEPROM芯片NX24C02A,兼容替代AT24C02
NAXIANGTECHNOLOGY纳祥科技NX24C02AEEPROMEEPROM(ElectricallyErasableProgrammablereadonlymemory),带电
linux内核中通用HID触摸驱动
在linux内核中,为HID触摸面板实现了一个通用的驱动程序,位于/drivers/hid/hid-multitouch.c文件中。hid触摸驱动是以struct hid_driver

用于TM4C129x器件的高耐用性EEPROM仿真驱动器
电子发烧友网站提供《用于TM4C129x器件的高耐用性EEPROM仿真驱动器.pdf》资料免费下载
发表于 09-19 10:38
•0次下载

英锐芯AD24C02_16-Byte(中性)
AD24C02是一款串行电可擦除编程只读存储器(EEPROM)。存储器可存储256个字节数据,分为16页 每页16字节,随机字寻址需要8位数据字地址,具有低功耗CMOS技术,自定时编程周期
发表于 09-09 15:08
•0次下载
探索存储新未来:为何EVASH EV24C256A EEPROM成为市场新宠
探索存储新未来:为何EVASH EV24C256A EEPROM成为市场新宠
Linux设备驱动程序分类有哪些
Linux设备驱动程序是操作系统与硬件设备之间的桥梁,负责实现硬件设备与操作系统之间的通信和控制。Linux设备驱动程序的分类繁多,可以根据不同的标准进行分类。 按硬件类型分类
linux驱动程序如何加载进内核
在Linux系统中,驱动程序是内核与硬件设备之间的桥梁。它们允许内核与硬件设备进行通信,从而实现对硬件设备的控制和管理。 驱动程序的编写 驱动
linux驱动程序的编译方法有哪两种
Collection)或其他C/C++编译器来编译源代码文件。这种方法较为原始,需要开发者手动指定编译器选项、包含路径、库文件等。然而,在Linux

玩转STM32和EV24C MCU + EEPROM ST + EVASH
STM32开发板(如STM32F103C8T6) EVASH EV24C256A EEPROM开发套件 连接线(杜邦线) 基本电子工具(烙
【GD32F303红枫派开发板使用手册】第二十一讲 I2C-EEPROM读写实验
21.1 实验内容
通过本实验主要学习以下内容:
•AT24C16 EEPROM的工作原理;
•IIC模块原理以及IIC驱动原理。

stm8s103k与AT24C02的iic通信不稳定是什么原因导致的?
stm8s103k与AT24C02的iic通信不稳定,有时可以读取数据,有时读不出
是什么原因?
有人与ADS1110用iic通信过吗?
发表于 04-30 07:33
STM32F103用普通IO口驱动24C02,读写不正确的原因?
以下24C02的驱动好像不稳定,不更换24C02时,读写都正确,但是更换一个24C02,数据就读写不正确,在把之前的正常的24C02重新焊上
发表于 04-19 06:12





 工商网监
工商网监
评论