 Linux驱动开发-编写PCF8591(ADC)芯片驱动
Linux驱动开发-编写PCF8591(ADC)芯片驱动
【摘要】 PCF8591是一个IIC总线接口的ADC/DAC转换芯片,功能比较强大,这篇文章就介绍在Linux系统里如何编写一个PCF8591的驱动,完成ADC数据采集,DAC数据输出。
1. PCF8591介绍
PCF8591是一个IIC总线接口的ADC/DAC转换芯片,功能比较强大,这篇文章就介绍在Linux系统里如何编写一个PCF8591的驱动,完成ADC数据采集,DAC数据输出。
下面是PCF8591的官方介绍-摘自中文手册:
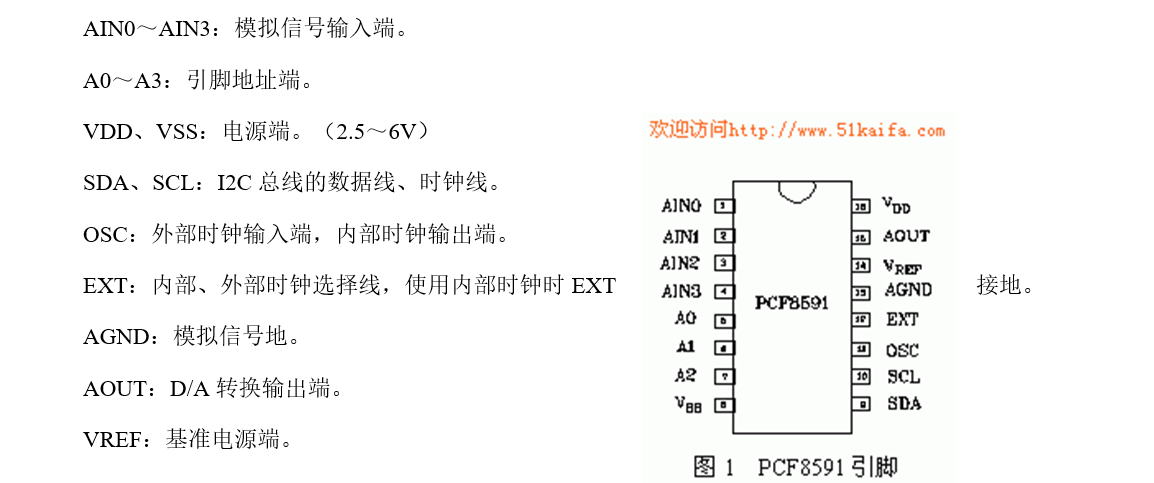
PCF8591是具有I2C总线接口的8位A/D及D/A转换器。有4路A/D转换输入,1路D/A模拟输出。这就是说,它既可以作A/D转换也可以作D/A转换,A/D转换为逐次比较型。
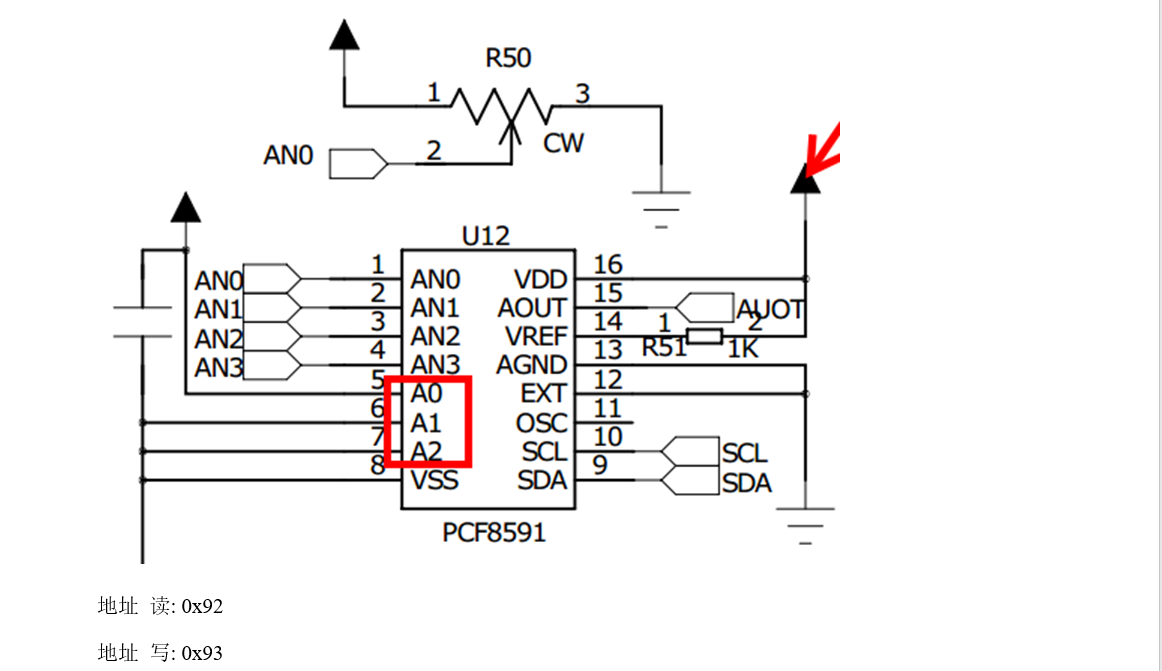
PCF8591采用典型的I2C总线接口器件寻址方法,即总线地址由器件地址、引脚地址和方向位组成。飞利蒲公司规定A/D器件地址为1001。引脚地址为A2A1A0,其值由用户选择,因此I2C系统中最多可接8个具有I2C总线接口的A/D器件。地址的最后一位为方向位R/W,当主控器对A/D器件进行读操作时为1,进行写操作时为0。总线操作时,由器件地址、引脚地址和方向位组成的从地址为主控器发送的第一字节。
2. 硬件环境介绍
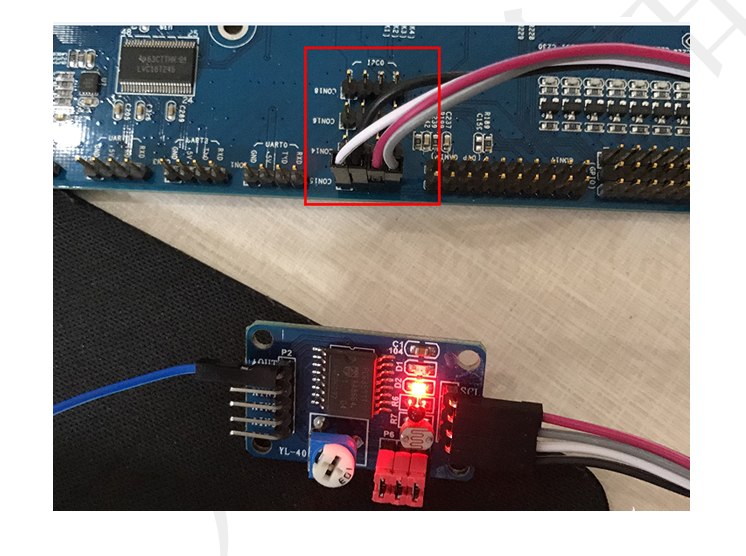
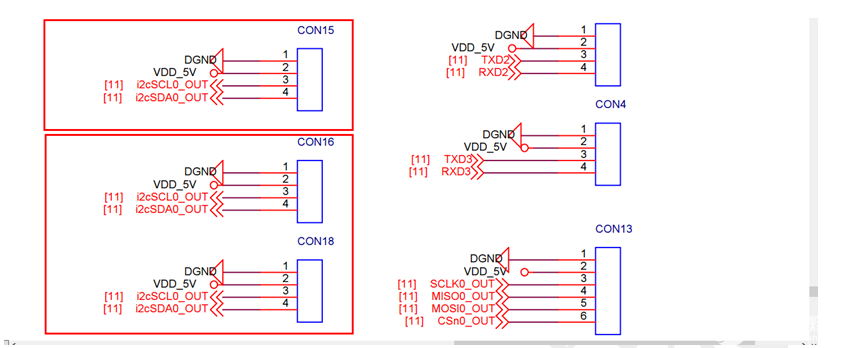
当前的开发板采用友善之臂Tiny4412开发板,采用三星的exynos-4412芯片,下面是开发板与PCF8591的硬件连线图:
下面是PCF8591的原理图,介绍了每个引脚详细功能:
3. 驱动案例代码
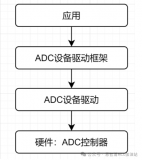
下面是PCF8591的驱动代码,采用IIC子系统框架编程,驱动代码分为设备端、驱动端两部分。
驱动框架采用杂项字符设备完成注册,给应用层提供访问的设备节点,详细的说明在代码路写了完整的注释。
3.1 驱动端代码
#include
#include
#include
#include
#include /*注册中断相关*/
#include /*中断边沿类型定义*/
#include /*中断IO口定义*/
#include /*工作队列相关*/
#include /*互斥信号量头文件*/
#include
#include /*杂项设备相关结构体*/
#include /*文件操作集合头文件*/
#include /*使用copy_to_user和copy_from_user*/
#define AIN0 0x40
#define AIN1 0x41
#define AIN2 0x42
#define AIN3 0x43
static struct i2c_client *PCF8591_client; /*IIC设备总线*/
/*读取PCF8591 ADC数据*/
unsigned char PCF8591_ReadADC(unsigned char ch)
{
return i2c_smbus_read_byte_data(PCF8591_client,ch);
}
static int PCF8591_open(struct inode *my_inode, struct file *my_file)
{
return 0;
}
static ssize_t PCF8591_read(struct file *my_file, char __user *buf, size_t my_len, loff_t * my_loff)
{
unsigned char data=PCF8591_ReadADC(AIN0);
copy_to_user(buf,&data,1);
data=PCF8591_ReadADC(AIN1);
printk("1:%d\r\n",data);
data=PCF8591_ReadADC(AIN2);
printk("2:%d\r\n",data);
data=PCF8591_ReadADC(AIN3);
printk("3:%d\r\n",data);
return 0;
}
static ssize_t PCF8591_write(struct file *my_file, const char __user *buf, size_t my_len, loff_t *my_loff)
{
//DAC输出
i2c_smbus_write_byte_data(PCF8591_client,0x40,100);
return 0;
}
static int PCF8591_release(struct inode *my_inode, struct file *my_file)
{
return 0;
}
/*定义一个文件操作集合结构体*/
static struct file_operations ops_PCF8591={
.owner = THIS_MODULE,
.read=PCF8591_read, /*读函数-被应用层read函数调用*/
.write=PCF8591_write, /*写函数-被应用层write函数调用*/
.open=PCF8591_open, /*打开函数-被应用层open函数调用*/
.release=PCF8591_release, /*释放函数*/
};
/*定义一个杂项设备结构体*/
static struct miscdevice misce_PCF8591={
.minor =MISC_DYNAMIC_MINOR, /*自动分配次设备号*/
.name = "Tiny4412_PCF8591", /*名称 在dev/目录下边可以找到*/
.fops = &ops_PCF8591, /*文件操作集合*/
};
static int i2c_probe(struct i2c_client *client, const struct i2c_device_id *device_id)//匹配成功时调用
{
PCF8591_client=client;
printk("<1>""驱动端IIC匹配的地址=0x%x\n",client->addr);
/* 检测适配器是否支持smbus字节读写函数 */
if(i2c_check_functionality(client->adapter, I2C_FUNC_SMBUS_BYTE_DATA))
{
printk("适配器支持smbus字节读写函数\n");
}
/*注册*/
misc_register(&misce_PCF8591);
return 0;
}
static int i2c_remove(struct i2c_client *client)
{
misc_deregister(&misce_PCF8591);/*注销*/
printk("i2c_驱动端卸载成功!!!\n");
return 0;
}
/*
IIC驱动端
*/
static const struct i2c_device_id i2c_id[] =
{
{"Tiny4412_PCF8591",0},//设备端的名字为"my_PCF8591",后面的表示需要私有数据
{}
};
struct i2c_driver i2c_drv =
{
.driver=
{
.name = "PCF8591",
.owner = THIS_MODULE,
},
.probe = i2c_probe,
.remove = i2c_remove,
.id_table = i2c_id,
};
static int __init i2c_drv_init(void)
{
i2c_add_driver(&i2c_drv);//向iic总线注册一个驱动
return 0;
}
static void __exit i2c_drv_exit(void)//平台设备端的出口函数
{
i2c_del_driver(&i2c_drv);
}
module_init(i2c_drv_init);
module_exit(i2c_drv_exit);
MODULE_LICENSE("GPL");
3.2 设备端代码
#include
#include
#include
#include
/*获取总线*/
struct i2c_adapter *i2c_adap; //获取到的总线存放在这个结构体
static struct i2c_client *i2cClient = NULL;
//PCF8591固定地址 b1001
//PCF8591硬件地址 b000
//组合:b1001000 = 0x48
//注意:IIC标准地址是7位
static unsigned short const i2c_addr_list[] =
{
0x48, I2C_CLIENT_END
};//地址队列
static int __init i2c_dev_init(void)
{
struct i2c_board_info i2c_info;//设备描述结构体,里面存放着欲设备的名字还有地址
i2c_adap = i2c_get_adapter(0); //获取0号总线
if(i2c_adap==NULL)
{
printk("PCF8591--II总线0 获取失败!!\n");
}
memset(&i2c_info,0,sizeof(struct i2c_board_info));//把设备描述结构体清空结构体清空
strlcpy(i2c_info.type,"Tiny4412_PCF8591",I2C_NAME_SIZE);//把设备的名字赋值给i2c_info
i2cClient = i2c_new_probed_device(i2c_adap,&i2c_info,i2c_addr_list,NULL);
if(i2cClient==NULL)
{
printk("PCF8591 0x%x:地址不可用!!\n",i2c_addr_list[0]);
}
i2c_put_adapter(i2c_adap);
printk("PCF8591_dev_init初始化成功!!\n");
return 0;
}
static void __exit i2c_dev_exit(void)//平台设备端的出口函数
{
/*注销设备*/
i2c_unregister_device(i2cClient);
i2c_release_client(i2cClient);
printk("PCF8591_dev_exit ok!!\n");
}
module_init(i2c_dev_init);
module_exit(i2c_dev_exit);
MODULE_LICENSE("GPL");
3.3 应用层代码
#include
#include
#include
#include
/*
PCF8591 应用层测试代码
*/
int main(int argc,char **argv)
{
unsigned char data=0;
int fp;
float tmp; // tmp=5.34v 0.34
int a;
int b;
fp=open("/dev/Tiny4412_PCF8591",O_RDWR);
if(fp<0) /*判断文件是否打开成功*/
{
printf("PCF8591 driver open error!\n");
return -1;
}
while(1)
{
read(fp,&data,1);
write(fp,&data,1);
printf("ADC1=%d\n",data);
tmp=(float)data*(5.0/255); //电压= 采集的数字量*(参考电压/分辨率);
a=tmp; //a=5 tmp=5.3
b=(int)((tmp-a)*1000); //b=0.34
printf("ADC1=%d.%dV\r\n",(int)a,(int)b);
sleep(1);
}
close(fp);
return 0;
}
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
adc
+关注
关注
98文章
6489浏览量
544415 -
转换芯片
+关注
关注
0文章
70浏览量
11393 -
PCF8591
+关注
关注
3文章
67浏览量
32805
发布评论请先 登录
相关推荐
基于恩智浦FRDM-MCXA153开发板实现RT-Thread的ADC驱动
数转换器(ADC)是现代嵌入式系统中不可或缺的组件,它能将连续的模拟信号转换为离散的数字信号。本文将深入探讨如何在NXP的FRDM-MCXA153开发板上实现和使用RT-Thread的ADC驱
linux内核中通用HID触摸驱动
在linux内核中,为HID触摸面板实现了一个通用的驱动程序,位于/drivers/hid/hid-multitouch.c文件中。hid触摸驱动是以struct hid_driver实现,首先定义一个描述hid触摸


linux下TLV320ADC3101音频这块驱动怎么配置、移植?
如下图示,现在是要配置TLV320ADC3101 两路音频差分输入;问下linux下TLV320ADC3101音频这块驱动怎么配置、移植。
需移植到i.MX 8M Mini平台
发表于 09-30 06:34
linux系统的设备驱动一般分几类
Linux系统的设备驱动是操作系统与硬件设备之间的桥梁,负责实现操作系统与硬件设备之间的通信和控制。Linux系统的设备驱动可以分为以下几类: 字符设备
Linux设备驱动程序分类有哪些
Linux设备驱动程序是操作系统与硬件设备之间的桥梁,负责实现硬件设备与操作系统之间的通信和控制。Linux设备驱动程序的分类繁多,可以根据不同的标准进行分类。 按硬件类型分类
linux驱动程序如何加载进内核
在Linux系统中,驱动程序是内核与硬件设备之间的桥梁。它们允许内核与硬件设备进行通信,从而实现对硬件设备的控制和管理。 驱动程序的编写 驱动
linux驱动程序主要有哪些功能
Linux驱动程序是操作系统与硬件设备之间进行通信的桥梁,负责实现硬件设备与操作系统之间的数据交换和控制。Linux驱动程序的主要功能包括以下几个方面: 设备识别与初始化
linux驱动程序的编译方法是什么
Linux驱动程序的编译方法主要包括两种: 与内核一起编译 和 编译成独立的内核模块 。以下是对这两种方法的介绍: 一、与内核一起编译 与内核一起编译意味着将驱动程序的源代码直接集成到Linu
linux驱动程序运行在什么空间
Linux 驱动程序是操作系统的一部分,负责管理硬件设备与操作系统之间的交互。驱动程序运行在内核空间(Kernel Space),这是操作系统的核心部分,与用户空间(User Space)相对。内核

ArmSoM系列板卡 嵌入式Linux驱动开发实战指南 之 字符设备驱动
字符设备驱动 本章,我们将学习字符设备使用、字符设备驱动相关的概念,理解字符设备驱动程序的基本框架,并从源码上分析字符设备驱动实现和管理等。 主要分为下面五部分:





 工商网监
工商网监
评论