 Linux驱动开发-编写超声波测距模块的驱动
Linux驱动开发-编写超声波测距模块的驱动
【摘要】 当前采用的这种超声波测距模块在各大高校实验室、毕设、课设里用的很多,原理很简单,通过声波测距,发出的声音碰到障碍物会反弹,声音在空气里传播的速度是已知的,根据时间就能计算出测量的距离。这款超声波模块内部自带了时间计算电路,型号是HC-SR04 ,它可提供 2cm-400cm 的非接触式距离感测功能,距精度可达高到 3mm; 整个模块包括了超声波发射器、 接收器与控制电路。
1. 介绍
当前采用的这种超声波测距模块在各大高校实验室、毕设、课设里用的很多,原理很简单,通过声波测距,发出的声音碰到障碍物会反弹,声音在空气里传播的速度是已知的,根据时间就能计算出测量的距离。这款超声波模块内部自带了时间计算电路,型号是HC-SR04 ,它可提供 2cm-400cm 的非接触式距离感测功能,距精度可达高到 3mm; 整个模块包括了超声波发射器、 接收器与控制电路。
基本工作原理:
(1) 采用 IO 口 TRIG 触发测距, 给至少 10us 的高电平信号;
(2) 模块自动发送 8 个 40khz 的方波, 自动检测是否有信号返回;
(3) 有信号返回, 通过 IO 口 ECHO 输出一个高电平, 高电平持续的时间就是超声波从发射到返回的时间。
测量距离的公式:
uS/58=厘米或者 uS/148=英寸;
或是: 距离=高电平时间*声速(340M/S)/2;
建议测量周期为 60ms 以上, 以防止发射信号对回响信号的影响。
下面是超声波模块与开发板的连线方式:
2. 示例代码
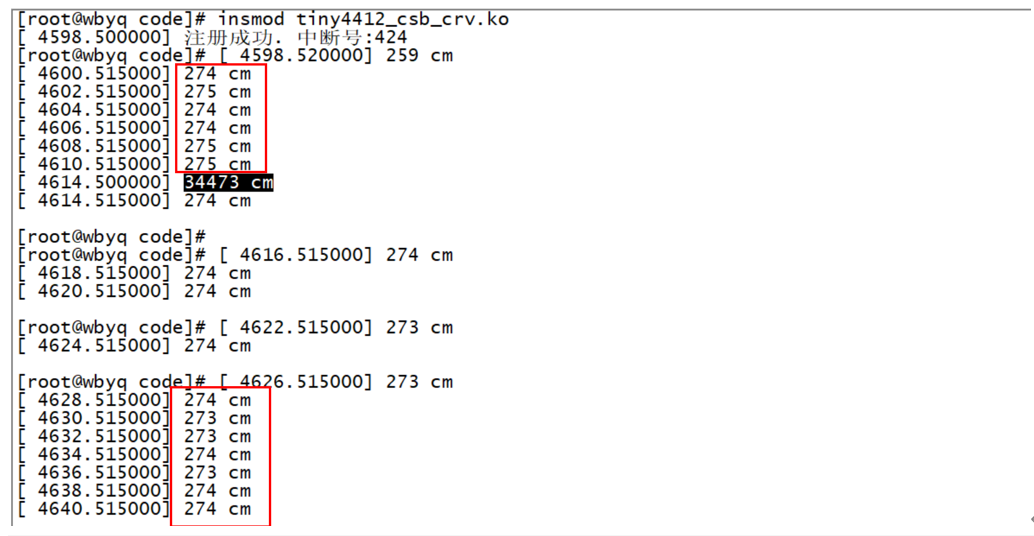
下面是超声波测距模块的驱动代码,将超声波模块的输出脚接在开发板支持中断的IO口上,配置为上升沿触发,当超声波输出脚检测到高电平就进去中断服务函数,在中断服务函数里调度工作队列,最终在工作函数里完成高电平的时间长度获取,计算测量的距离,直接在驱动代码里打印出来。
下面是测量的结果:
2.1 驱动代码
#include
#include
#include
#include
#include
#include
#include
static struct timer_list timer;
static struct work_struct work;
static int irq;
#define TRIG EXYNOS4_GPB(7) //输出触发信号 第8个IO口
#define ECHO EXYNOS4_GPX1(0) //ECHO 回响信号输出--中断 第9个IO口
/*获取高电平持续时间--us单位*/
static u32 GetTimeH(void)
{
ktime_t my_time,my_time2;
unsigned int i,j;
my_time=ktime_get(); //获取当前时间
i=ktime_to_us(my_time); //转 us
while(gpio_get_value(ECHO)){}
my_time2=ktime_get(); //获取当前时间
j=ktime_to_us(my_time2); //转 us
return j-i;
}
/*
工作函数
*/
static void csb_work_func(struct work_struct *work)
{
u32 time=GetTimeH();
printk("厘米:%d cm\n",time/58);
}
/*外部中断服务函数*/
irqreturn_t csb_irq_handler_func(int irq, void *dev)
{
/*添加工作到工作队列*/
schedule_work(&work);
return IRQ_HANDLED;
}
/*内核定时器中断服务函数*/
static void timer_function(unsigned long data)
{
static u8 i=0;
mod_timer(&timer,msecs_to_jiffies(1000)+jiffies);
i=!i;
if(i)
{
gpio_set_value(TRIG,1);
}
else
{
gpio_set_value(TRIG,0);
}
}
static int __init tiny4412_linux_csb_init(void)
{
/*请求GPIO口使用权*/
gpio_request(TRIG,"CSB");
/*配置GPIO引脚*/
s3c_gpio_cfgpin(TRIG,S3C_GPIO_OUTPUT);
/*GPIO默认输出值*/
gpio_set_value(TRIG,0);
/*初始化工作函数*/
INIT_WORK(&work,csb_work_func);
/*1. 获取中断号*/
irq=gpio_to_irq(ECHO);
/*2. 注册中断*/
request_irq(irq,csb_irq_handler_func,IRQF_TRIGGER_RISING,"tiny4412_csb",NULL);
timer.expires=HZ+jiffies; /*单位是节拍*/
timer.function=timer_function;
timer.data=666;
/*1. 初始化定时器*/
init_timer(&timer);
/*2. 添加定时器到内核*/
add_timer(&timer);
printk("驱动测试: 驱动安装成功\n");
return 0;
}
static void __exit tiny4412_linux_csb_cleanup(void)
{
/*3. 删除定时器*/
del_timer_sync(&timer);
free_irq(irq,NULL);
printk("驱动测试: 驱动卸载成功\n");
}
module_init(tiny4412_linux_csb_init); /*驱动入口--安装驱动的时候执行*/
module_exit(tiny4412_linux_csb_cleanup); /*驱动出口--卸载驱动的时候执行*/
MODULE_LICENSE("GPL"); /*设置模块的许可证--GPL*/
2.2 Makefile
KER_DRI=/home/wbyq/work/linux-3.5/linux-3.5
all:
make -C $(KER_DRI) M=`pwd` modules
cp *.ko /home/wbyq/work/rootfs/code -f
make -C $(KER_DRI) M=`pwd` modules clean
obj-m += linux_csb.o
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
驱动
+关注
关注
12文章
1860浏览量
85867 -
超声波测距模块
+关注
关注
1文章
8浏览量
5038
发布评论请先 登录
相关推荐
Aigtek功率放大器如何驱动超声波探头
驱动超声波探头是功率放大器应用的一种重要场景。功率放大器作为超声波系统的关键部分之一,扮演着将电信号转化为声能,并提供足够的功率驱动超声波探

AK2超声波传感器驱动和信号处理:Elmos芯片篇
Elmos芯片在AK2超声波传雷达驱动和信号处理方面提供了高度集成的解决方案,它们不仅提高了超声波泊车辅助系统的准确性和可靠性,还通过集成的MCU和通信接口,为实现更智能的泊车辅助功能提供了可能。

【CW32模块使用】US-016超声波测距传感器
US-016是市场上唯有的一款模拟量输出的超声波测距模块,输出的模拟电压和距离值成正比,可以方便的和其他系统相连,US-016工作稳定可靠。 US-016超声波

RK3568教学实验箱_操作案例:5-19 超声波测距实验
、熟悉Qt程序的开发流程;
2、掌握Qt Creator的基础开发使用;
3、通过编写Qt程序实现超声波测距的显示界面。
三、实验原理
Qt
发表于 09-23 15:40

超声波测速的原理、方法及应用
超声波测速是一种利用超声波在介质中的传播速度来测量物体速度的技术。它广泛应用于工业、医疗、交通等领域。 一、超声波测速的原理 超声波的定义 超声波
第七章-V1.5 STM32超声波测距STM32F103C8t6超声波避障小车 超声波避障模块 STM32超声波测距
5STM32超声波测距STM32F103C8t6超声波避障小车

超声波发生器-40khz脉冲功能的应用场景有哪些?-驱动板
索尼克超声(ucsonic) 超声波驱动板40kHz的脉冲功能在多个应用场景中发挥着重要作用,尤其是在需要高效、精确的清洗和清洁的领域。以下是几个主要的应用场景: 1.超声波清洗:在

超声波无损检测原理及应用
超声波无损检测(Ultrasonic Non-Destructive Testing,简称UT)是一种利用超声波在材料内部传播的特性,检测材料内部缺陷和结构的无损检测技术。本文将详细介绍超声波无损
在全志H616核桃派开发板上实现超声波传感器测距
实现超声波传感器测距。
实验讲解
下图是一款市面上常用的HCSR04超声波模块:
模块参数
供电电压
3.3V~5V (核桃派需要使用支持3.3V的)
测量距离
2cm~450c
发表于 05-08 16:21
超声波连接示波器问题
我买了一只中心频率2.5Mhz的超声波探头,当我连接到示波器上的时候就有信号在显示屏上。
我想问的是示波器上的信号到底是接收的环境中的超声波信号?
还是当探头接到示波器上 探头就会自动的发射超声波然后再接收自己发射的
发表于 05-04 14:46
基于51单片机的车辆倒车雷达报警系统,HC-SR04超声波测距,全套资料
设计要求
1.设计一个以51单片机为核心的超声波倒车雷达系统;
2.超声波测量范围在2cm~4m,测量精度3mm;
3.扩展DS18B20温度测量模块,读取环境温度和补偿超声波
发表于 03-19 14:17





 工商网监
工商网监
评论