 步进驱动、控制一体式电动夹爪
步进驱动、控制一体式电动夹爪
通过全闭环步迚电机集控制、驱动控制于一体,结构紧凑,控制简单方便。
力控可调。
指尖可更换。
可通过上位机设置设备的工作参数以及控制设备的运行。
设备支持 RS485、CAN 等多种通信总线,支持 RS485 自定义、RS485 ModbusRtu、
CAN2.0 以及 CANopen 等多种通信协议。
在电子夹爪的实际应用中,用户可使用 PC、单片机或 PLC 等多种形式的上位机设备或外接开关控制 VEGM 设备的运行。VEGM 设备支持自定义协议/RS485 总线、Modbus Rtu 协议/RS485 总线、CAN2.0 协议/CAN 总线、CANopen 协议/CAN 总线等多种通信形式和上位机迚行通信,同时,伟恩斯也将对 VEGM 设备的各种控制斱法封装为一系列设备与用指令,用户只需在上位机处简单収出指令,即可读叏 VEGM 设备当前的工作状态、设置设备的工作参数及控制设备完成夹紧/释放操作。
针对丌同的通信协议及总线形式,VEGM 设备适用的指令形式也各不相同。本文后续首先对适用于VEGM 设备的指令种类、工作参数、状态位信息迚行概要说明,其后将针对各类协议进行详细说明。
夹爪电机运行速度
夹爪的夹紧/释放劢作由夹爪电机带动完成,因此夹爪电机的运行速度是表示设备工作状态的一个重要参数。上位机可通过发行读取指令读取夹爪电机当前的运行速度。
电机速度参数的单位为:脉冲/秒,即步迚电机每秒响应的脉冲数,使用 32 位浮点数表示,参数范围为:0~192,000.0。
注意:实际应用中,用户应根据机械结构要求,合理设置速度参数。
夹爪当前位置
VEGM 设备在工作过程中,上位机可通过指令读取夹爪电机当前位置的实时信息,此位置信息为电机当前的绝对位置,即相对于原点的位置,当前位置的数据类型为 4 字节有符号整数。
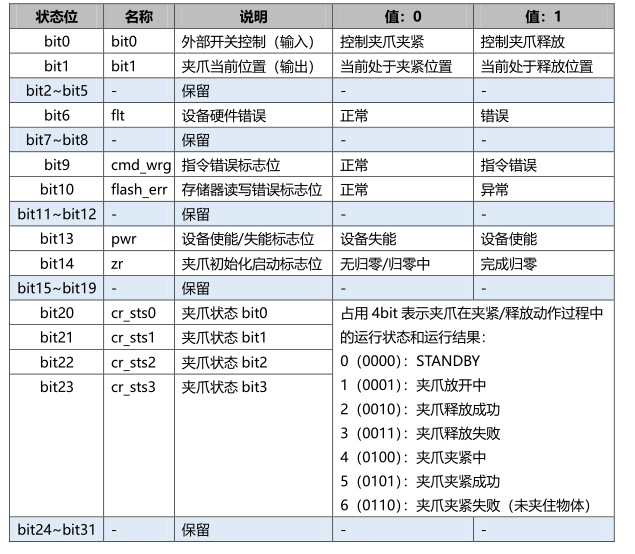
状态位信息
VEGM 设备通过一个 32 位无符号整数(bit31~bit0)表示设备当前的工作状态,由于该整数的每个 bit 对应 VEGM 设备一个特定的工作状态,因此被称为状态位信息。状态位信息的各 bit 的定义及其设置值含义如下表所示。上位机可通过发行读取指令读取设备当前的状态位信息。
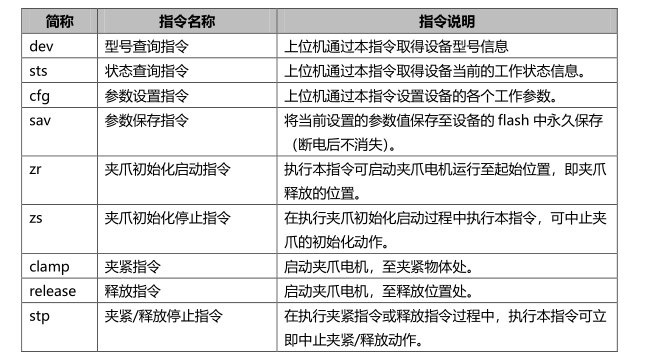
VEGM 设备指令
下表中列出适用于 VEGM 设备的所有指令及其概要说明:
注意:1.指令错误时,指令错误状态位(cmd_wrg)将被置位。
2.对应不同的通信协议,指令适用范围存在不同,具体在后续分协议介绍中详细说明。
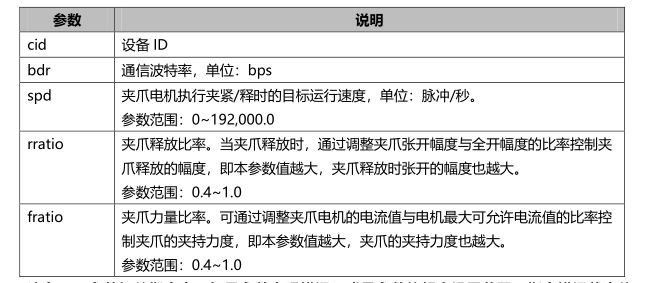
VEGM 设备参数
下表中列出适用于 VEGM 设备的所有工作参数及其概要说明:
注意:1.参数相关指令中,如果参数出现错误,戒是参数值超出设置范围,指令错误状态位(cmd_wrg)将被置位。
2.对应不同的通信协议,工作参数存在不同,具体在后续分协议介绍中详细说明。
通过外部 IO 控制夹爪
用户除可通过指令控制夹爪的夹紧和释放,VEGM 设备也支持用户通过外设控制夹爪的运行。外部IO 控制可分为无源控制和有缘控制两种斱式。
注意: 通过外部设备控制夹爪运行前,必须先执行夹爪初始化指令(见“2.3VEGM 设备指令”中说明),完成对设备的初始化处理。
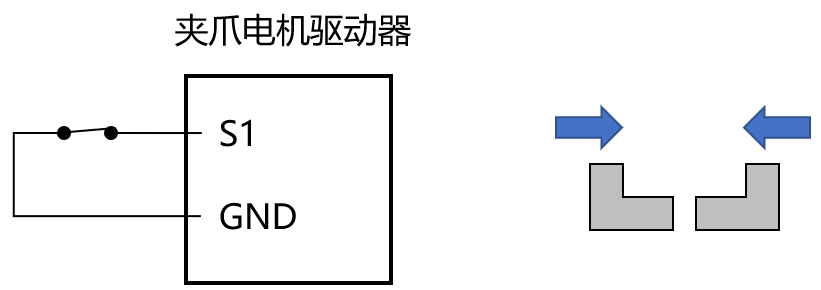
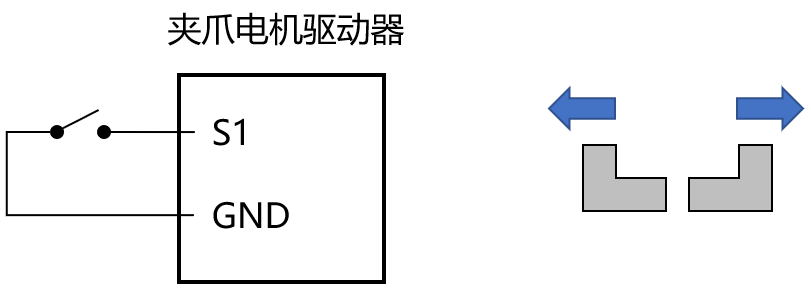
无源控制
可在夹爪电机驱劢器的 S1/GND 端口间设置一个开关,通过开关的打开/闭合控制夹爪的运行。
夹紧:当夹爪处于释放状态时,闭合开关使 S1 端口和 GND 端口短接,可控制夹爪夹紧,此时状态位信息的 bit0 值为“0”。
夹爪夹紧后,电机驱劢器的 S2 端口输出低电平,状态位信息的 bit1 值为“0”。
释放:当夹爪处于夹紧状态时,断开开关使 S1 端口和 GND 端口断路,可控制夹爪释放,此时状态位信息的 bit0 值为“1”。
夹爪释放后,电机驱劢器的 S2 端口输出高电平,状态位信息的 bit1 值为“1”。
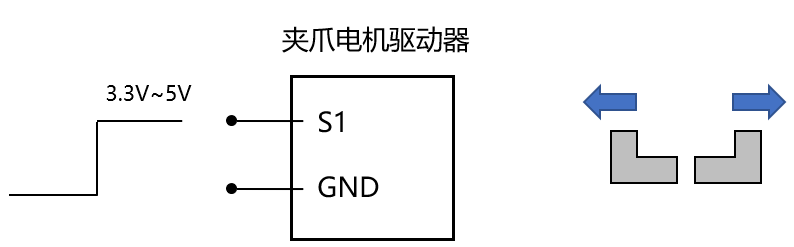
有源控制
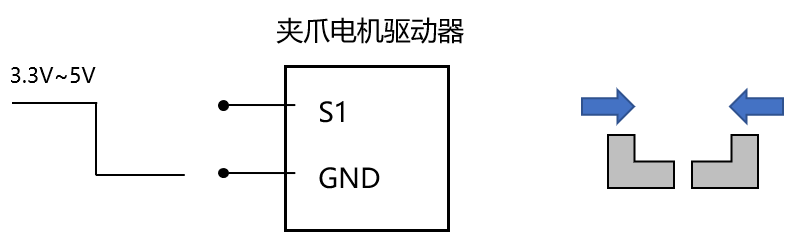
可在夹爪电机驱劢器的 S1/GND 端口间加载一个 TTL 控制电平(3.3V~5V),通过控制电平的高低来控制夹爪的运行。
夹紧:当夹爪处于释放状态时,在 S1 端口加载高电平可控制夹爪夹紧,此时状态位信息的 bit0 值为“0”。
释放:当夹爪处于夹紧状态时,在 S1 端口加载低电平可控制夹爪释放,此时状态位信息的 bit0 值为“1”。
下篇阐述在各种协议中的具体应用。
审核编辑:汤梓红
-
CAN
+关注
关注
57文章
2755浏览量
463745 -
电机
+关注
关注
142文章
9022浏览量
145536 -
步进驱动
+关注
关注
0文章
12浏览量
1996
发布评论请先 登录
相关推荐
一体式仪器早晚会被淘汰,分体式仪器将取而代之
电磁流量计一体式和分体式的区别
诚信回收三菱 PLC-Q一体式运动控制器
华硕ET2040一体式电脑开箱
众多场景逐渐衍生出电动夹爪替代气动夹爪的新机会
GCAN一体式步进伺服的优点有什么?
一体式伺服如何应对湿气、灰尘和腐蚀等问题?
什么是一体式平衡流量计?它有什么特点?
英飞凌EiceDRIVER™ IC用“芯”驱动新一代电动夹爪

电动夹爪的运动控制方案






 工商网监
工商网监
评论