 基于AUTOSAR的应用层如何获取准确的时间戳呢
基于AUTOSAR的应用层如何获取准确的时间戳呢
前言
首先,请问大家几个小小问题,你清楚:
基于AUTOSAR的应用层如何获取准确的时间戳吗?
时间同步的具体过程包含哪些细节呢?
如何正确地获取到全局时间戳呢?
今天,我们来一起探索并回答这些问题。为了便于大家理解,以下是本文的主题大纲:
正文
时间同步软件框架
正如前文《AUTOSAR基础篇之CanTsyn》所述,CanTsyn模块负责时间同步之间的协议处理,StbM模块则用来负责抽象底层不同的时间同步协议,为上层提供统一的时间戳接口以及当前的时间同步状态的接口。
通过如下图1所示的Tsync则用来代表基于不同总线通讯的时间同步协议,StbM则是时间同步协议层基础上的抽象,OS作为Triggered Customer,SW-C则作为Active Customer,后文将解释这两者之间的区别。
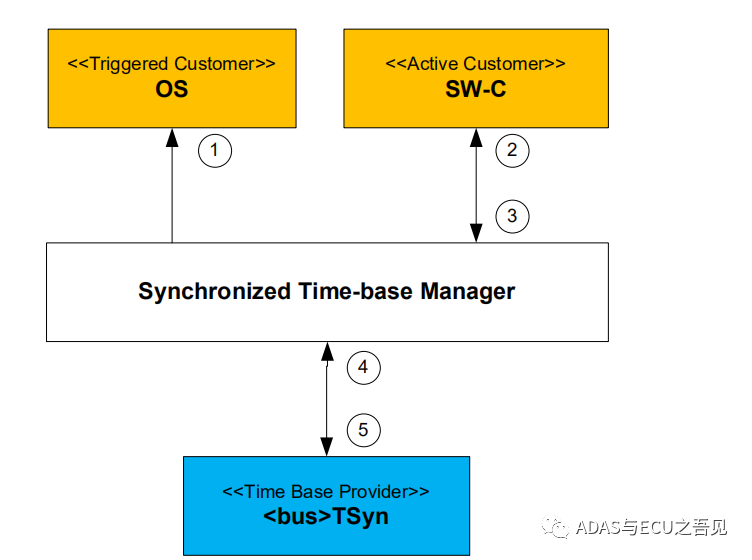
图1 AUTOSAR时间同步协议软件框架
在上图中,我们可以看到存在5个不一样的数据流,下面将一一解释每个数据流的基本作用:
数据流1表示StbM主动调用TriggerCustomer提供的函数接口来完成时间同步,当前主要应用场景为OS Schedule Table的同步;
数据流2表示Active Customer(SW-C)主动调用StbM提供的标准接口来获取当前时间戳或者时间同步状态;
数据流3表示Active Customer(SW-C)主动调用StbM提供的标准接口来更新StbM维护的时间基准;
数据流4表示StbM模块通过Tsyn模块提供的标准函数接口来更新StbM的时间基准;
数据流5表示StbM模块主动通过Tsyn模块提供的标准函数接口来将当前的时间同步信息发送到相应的bus总线上。
在时间同步领域内涉及到诸多专有名词,因此为了便于大家理解后续的内容,有必要在此跟大家解释些重要的标准术语,具体细节如下图2所示:
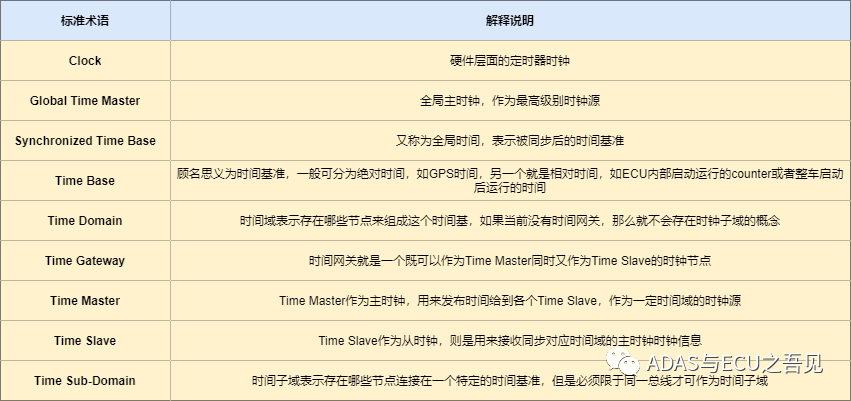
图2 时间同步标准术语解释
启动阶段
在该阶段StbM模块将会提供完成必要的初始化来提供针对上层应用的时间同步服务。
前置条件
StbM模块通过调用函数接口StbM_Init来完成初始化工作,但是在此之前需务必完成基础通讯模块的初始化,如Canif模块初始化,CanTsyn模块初始化等。
初始化
通过调用上述函数完成初始化之后,将会完成如下基本动作:
变量StbMSynchrinizedTimeBase将会被初始化为0;
timeBaseStatus将会将所有的bit初始化为0;
如果参数StbMStoreTimebaseNonVolatile等于STORAGE_AT_SHUTDOWN,那么就会从NVM中获取数据(一般包含s跟ns部分),如果NVM获取数据不成功,则都会赋值为0处理。
正常工作
Synchronized Time Base
每一次调用函数接口StbM_BusSetGlobalTime()时就会更新对应的同步time base以及对应的Time Base Status。
Time Master 同步状态监控
如下图3所示,一个全局时间网络至少一个Time Master跟一个Time Slave, Time Master将会将其时间信息传递至在同一Time Domain下的Time Slave。
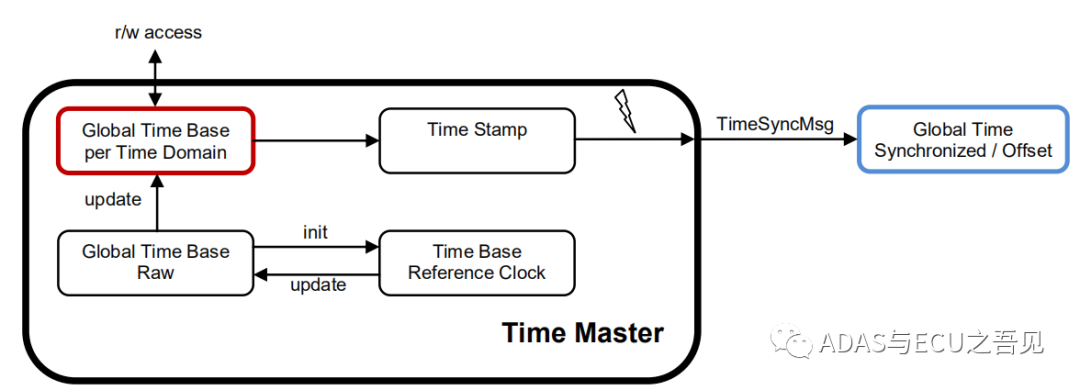
图3 Time Master 同步状态更新示意图
由上图可知,Time Master通过reference本地clock来更新本地全局时间,然后通过sync/FUP报文发送给到总线上。其中,如果Time Domain为0-15则为synchronized time base,而Time Domain 16-31则为Offset Time Base。
通过调用函数接口 StbM_GetCurrentTime() 来获取当前对应Time Domain下的Time Base,对应的timebasestatus以及user data;
通过调用函数接口StbM_GetCurrentTimeRaw() 来获取当前时间Time Base的ns部分;
通过调用函数接口StbM_GetCurrentTimeDiff() 来获取输入的时间戳与当前时间戳的时间间隔,单位为ns;
通过调用函数接口StbM_BusSetGlobalTime()来更新当前的Time Base以及设置对应的timebaseStatus;
通过调用函数接口 StbM_SetGlobalTime()并且会就将GLOBAL_TIME_BASE bit位置1,同时清除其他bit 位;
Time Slave 同步状态监控
如下图4所示体现了Time Slave的数据流交互关系,在下图中我们可以看到Time Slave会接收来自同一Time Domin下的sync/fup 报文,同时加上本地计算出来的接收sync/fup报文的时间差最终用于更新当前StbM的Time Base,该Time Base将最终被应用到应用层。
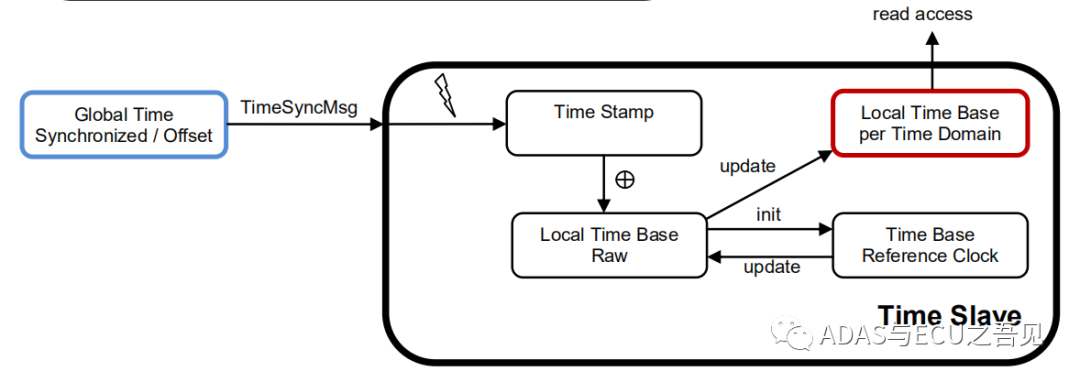
图4 Time Slave同步状态更新图
Time Slave在完成上述时间同步的过程中,需要注意几点:
每次更新调用函数StbM_BusSetGlobalTime时,都会比较下当前更新的时间戳与当前内部正在使用的时间戳的差值是否超过StbMSyncLossThreshold参数设定的值,如果该值为0,则会取消该部分的检查,如果超过了设定的值, 那么将会将timeBaseStatus中的状态位TIMELEAP 置1;
如果下一次更新,差值保证在范围内,那么timeBaseStatus中的状态位TIMELEAP将会被清0;
TIme Slave会实时确认下当前的时间戳与最近一次调用该函数的时间差距是否在参数StbMSyncLossTimeout设定的范围内,如果Timeout发生,那么需置timeBaseStatus中的TIMEOUT bit位,一旦调用StbM_BusSetGlobalTime函数将会清除该TIMEOUT bit位。
如果从来没有发生过时间同步, 那么TIMEOUT位将不会置位,只要发生过一次成功的时间同步,后续同步没有按照预期发送,那么就会启动这个Timeout检查。
如果参数syncToTimeBase设定为sync to GTM,那么调用StbM_BusSetGlobalTime() 将会清除timeBaseStatus中的SYNC_TO_GATEWAY bit位;
如果参数syncToTimeBase设定为sync to subdomain,那么调用StbM_BusSetGlobalTime() 将会置位timeBaseStatus中的SYNC_TO_GATEWAY bit位;
一旦调用函数接口fStbM_BusSetGlobalTime(),那么就会设置timeBaseStatus中的GLOBAL_TIME_BASE Bit位,一旦置位,则不会清除。
Time Gateway同步状态监控
Time Gateway既作为属于某个Time Domain的Time slave,同时也会作为某个Time Domain下的Time Master而存在,如果存在Time Gateway的节点,那么必然存在Time SubDomain的概念。
如果Time Gateway作为某个Time Domain的Time Slave存在,同样存在着如下特性需要了解:
每次更新调用函数StbM_BusSetGlobalTime时,都会比较下当前更新的时间戳与当前内部正在使用的时间戳的差值是否超过StbMSyncLossThreshold参数设定的值,如果该值为0,则会取消该部分的检查,如果超过了设定的值, 那么将会将timeBaseStatus中的状态位TIMELEAP 置1;
如果下一次更新,差值保证在范围内,那么timeBaseStatus中的状态位TIMELEAP将会被清0;
TIme Slave会实时确认下当前的时间戳与最近一次调用该函数的时间差距是否在参数StbMSyncLossTimeout设定的范围内,如果Timeout发生,那么需置timeBaseStatus中的TIMEOUT bit位,一旦调用StbM_BusSetGlobalTime函数将会清除该TIMEOUT bit位。
如果从来没有发生过时间同步, 那么TIMEOUT位将不会置位,只要发生过一次成功的时间同步,后续同步没有按照预期发送,那么就会启动这个Timeout检查。
如果参数syncToTimeBase设定为sync to GTM,那么调用StbM_BusSetGlobalTime() 将会清除timeBaseStatus中的SYNC_TO_GATEWAY bit位;
如果参数syncToTimeBase设定为sync to subdomain,那么调用StbM_BusSetGlobalTime() 将会置位timeBaseStatus中的SYNC_TO_GATEWAY bit位;
一旦调用函数接口fStbM_BusSetGlobalTime(),那么就会设置timeBaseStatus中的GLOBAL_TIME_BASE Bit位,一旦置位,则不会清除。
Offset Time Base
对于Offset Time Base,相比Synchronized Time Base存在着如下一些特性:
每次调用StbM_SetOffset()就会用来更新相应的Time base的 Offset Time;
函数StbM_SetOffset() 与StbM_GetOffset() 只能接收16-31的TimeBaseId;
每一次调用函数StbM_GetOffset()将会返回对应的Offset Time Base的Offset Time;
在配置上也会存在限制,即只有StbMSynchronizedTimeBaseIdentifier为16至31,StbMOffsetTimeBase才会真实有效。
Customer
Customers作为理解为基于StbM模块基础之上的一种应用角色,按照其功能作用可划分为如下两种角色:
Active customers:顾名思义就是一种主动触发调用StbM相关函数接口的应用角色;
Triggered customers:就是一种被动被StbM模块调用其自身接口的应用角色;
Active customers
对于Active customers,为了便于理解,我们可以列出如下场景来体现其基本作用:
读取当前的time base value,同步状态以及user data;
设置对应time base的value以及相应的user data;
Triggered customers
对于Triggered customer,当前仅用于同步OS的schedule table,通过调用OS提供的API函数 SyncScheduleTable() 来实现Schedule Table之间的counter同步。
通过配置参数STBM_TRIGGERED_CUSTOMER_PERIOD来完成StbM定周期调用上述函数接口来完成各个sechdule table的os counter间的同步;
同时StbM仅在Schedule Table 处于WAITING,RUNNING,或者 RUNNING_SYNCHRONOUS状态时完成同步,因此也就意味着StbM在同步前先要确认下当前需同步的Schedule Table的状态,然后才能进行同步。
关闭阶段
针对Shutdown阶段,仅存在一个需要做的操作,如果参数StbMStoreTimebaseNonVolatile等于STORAGE_AT_SHUTDOWN,那么便会将当前实时时间戳(S跟ns部分)存储在NVM中。
常用函数接口说明
为了便于大家了解StbM模块所提供的基本功能,因此将常见的函数接口列举如下,以方便大家的查阅:
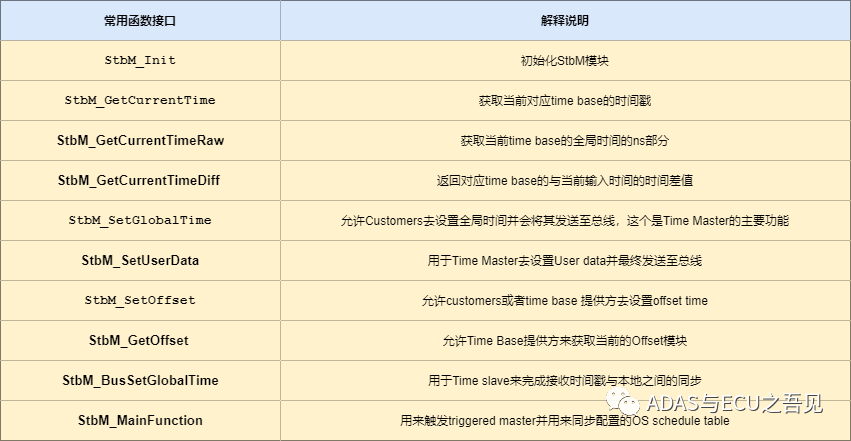
图5 StbM模块常用函数接口
审核编辑:刘清
-
AUTOSAR
+关注
关注
10文章
360浏览量
21548 -
NVM
+关注
关注
1文章
41浏览量
19118 -
Bus总线
+关注
关注
1文章
6浏览量
7960
发布评论请先 登录
相关推荐
AUTOSAR通信与网络安全 AUTOSAR通信在车辆中的应用
AUTOSAR中通信堆栈的配置 AUTOSAR通信模块测试方法
AUTOSAR通信与CAN协议的关系
AUTOSAR通信组件介绍 AUTOSAR通信层功能分析

PCM2707C是否支持Android系统?PCM2707C Android应用层怎么写?
Linux应用层控制外设的两种不同的方式
物联网中的普通传感器如何通过DTU/RTU透传带有时间戳和IMEI的数据

esp32获取时间戳的相关函数是哪个?
STM32L051同时开启RTC时间戳和秒唤醒后,使用GPIO引脚无法触发时间戳中断如何解决?
ELF 1技术贴|应用层更改引脚复用的方法

GTM模块中的TBU时间基准单元中,这个时间基准是什么意思呢?
物联网结构之应用层






 工商网监
工商网监
评论