 基于多边形拼接虚拟管道的无人机集群分布式控制
基于多边形拼接虚拟管道的无人机集群分布式控制
本文节选并改编于“Yan Gao, Chenggang Bai and Quan Quan. Distributed Control for aMulti-Agent System to Pass through a Connected Quadrangle Virtual Tube [J]. IEEETransactions on Control of Network Systems (Early Access), 2022
简介
近些年来,随着相关技术的快速发展,无人机集群越来越多的应用于各种复杂的任务。其中,如何引导无人机集群穿越复杂环境并安全到达指定区域是一个亟待结局的问题。在这过程中,各无人机不仅要实现机间防碰撞,还需要与环境中的各种障碍物防碰撞。 本文创新性的设计了一种“多边形拼接虚拟管道”,在虚拟管道内没有障碍物。因此无人机只需在实现机间防碰撞的基础上,保持飞行在虚拟管道内,即可实现穿越复杂环境。针对多边形拼接虚拟管道,本文还设计了一种基于向量场算法的分布式控制器,并通过仿真、实验进行验证。
1. 虚拟管道建模
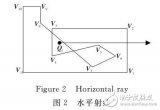
多边形拼接虚拟管道的基础是“梯形虚拟管道”,因此首先介绍梯形虚拟管道。如图1所示,梯形虚拟管道包括一条起始线,一条终点线和两条边界线。相对应的,多边形拼接虚拟管道的每个多边形,同样包括一条起始线,一条终点线和两条边界线,如图2所示。不同之处在于,梯形虚拟管道的起始线与终点线必须保持平行,多边形则不然。
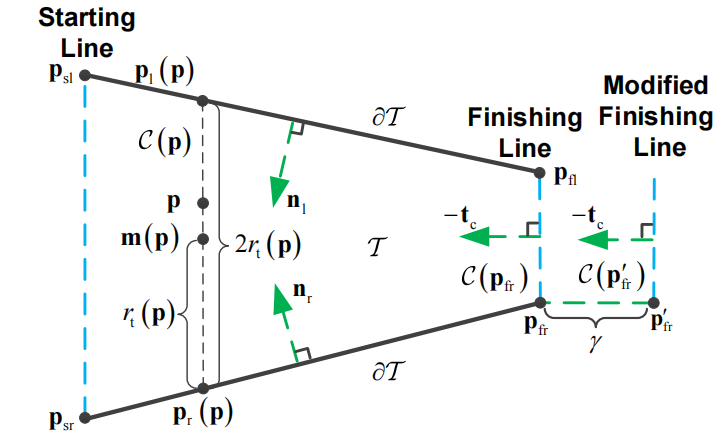
图1
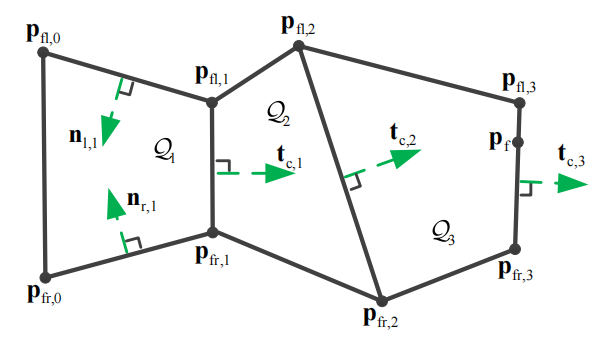
图1
2. 控制器设计
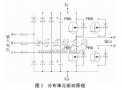
针对梯形虚拟管道,我们基于向量场算法,设计了一种无死锁的分布式控制器。该控制器由三个控制指令叠加而成,分别为沿着管道前飞指令,防碰撞指令以及管道保持指令。基于拉塞尔不变集的相关性质,我们证明了该控制器可保证无人机集群始终安全地飞行在虚拟管道内,并能顺利通过梯形虚拟管道,且无死锁、堵塞现象的发生。图3展示了该控制器的向量场示意图,其中管道中心处存在一架友方无人机。
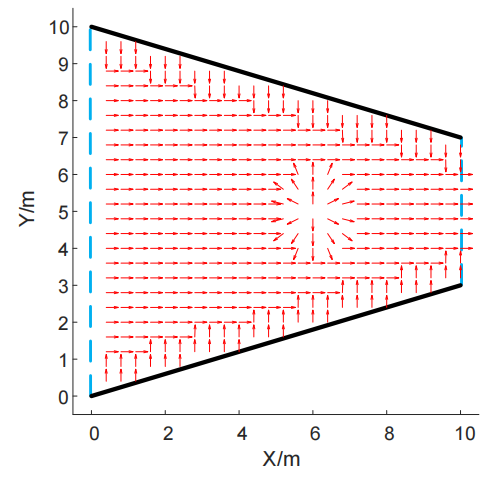
图3
针对多边形拼接虚拟管道,我们设计了一种无死锁的切换逻辑。如图4所示,每个多边形都定义了其对应的内接梯形、外接梯形和底边梯形。当无人机恰好穿越两个多边形的分界线时,无人机首先应用下一个多边形对应的底边梯形控制器。当无人机进入该多边形对应的内接梯形时,无人机转而应用该内接梯形的控制器。
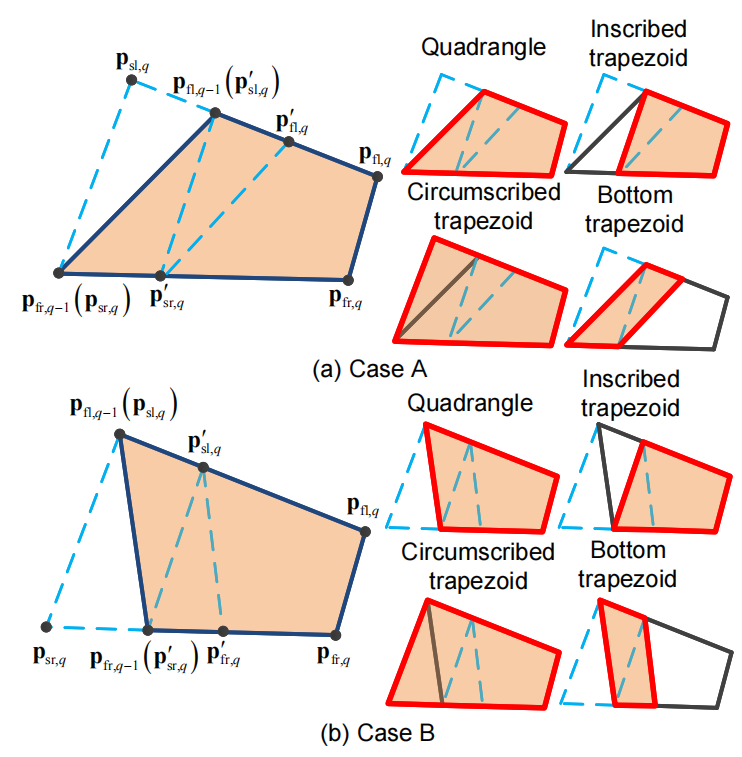
图4
3. 仿真与实验
首先,在Matlab仿真环境中验证所提出算法的有效性。如图5所示,20架无人机以不同的速度穿越多边形拼接虚拟管道。在仿真开始时,最前方的无人机速度最慢,最后方的无人机速度最快,因此后方的无人机有超越前方无人机的趋势。通过仿真可以看出,我们提出的算法实现了控制目标,即无人机集群始终安全地飞行在虚拟管道内,并能顺利通过虚拟管道。其次,我们利用Tello无人机远程控制平台进行实验。如图6所示,与仿真结果类似,各个无人机安全、快速地穿越了多边形拼接管道。
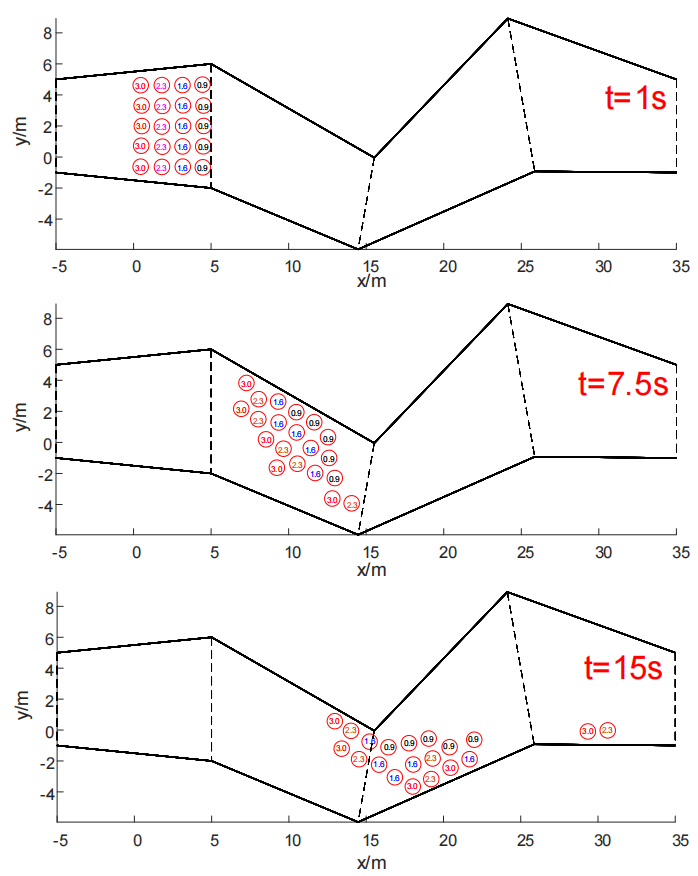
图5
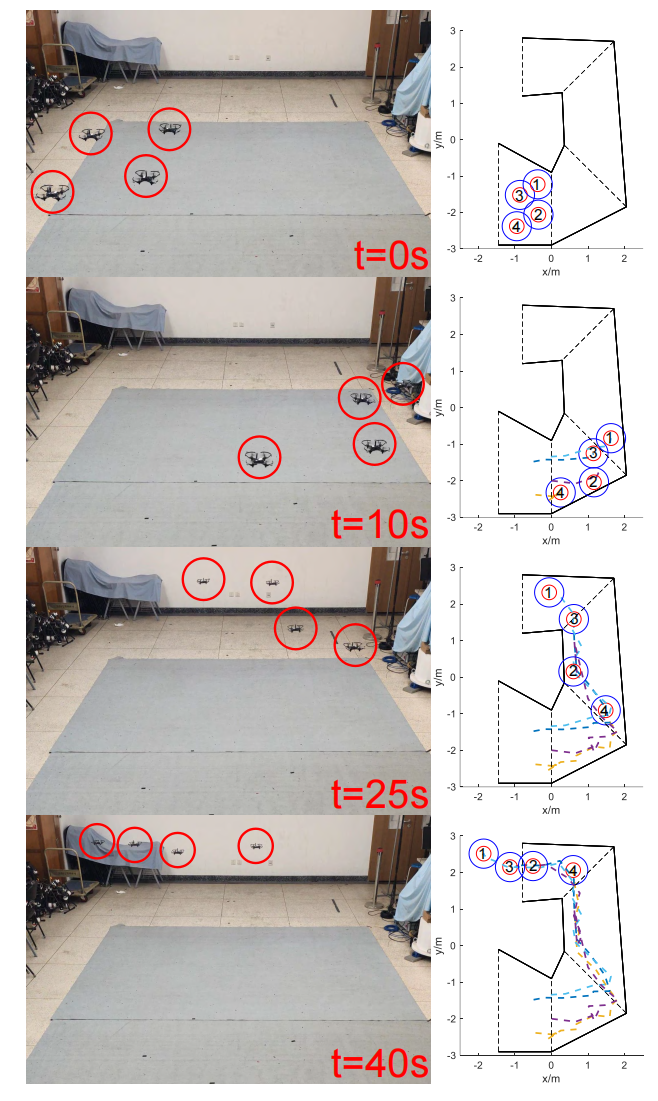
图6
审核编辑 :李倩
-
控制器
+关注
关注
112文章
16376浏览量
178202 -
算法
+关注
关注
23文章
4613浏览量
92948 -
无人机
+关注
关注
230文章
10449浏览量
180582
原文标题:基于多边形拼接虚拟管道的无人机集群分布式控制
文章出处:【微信号:雨飞工作室,微信公众号:雨飞工作室】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
基于虚拟仪器的城市景观照明分布式控制系统设计与实现
无人机主从式姿态同步控制器设计与仿真
工业机器人分布式控制系统实例

新型的高压变频分布式控制系统
CAD图形里的圆显示为多边形怎么办?
一种新的判断点在多边形内外的算法
集群无人机的影响及应用发展
基于CAN总线和分布单元控制器实现高压变频分布式控制系统的设计
分布式控制系统的介绍
无人机集群如何自己组网
多无人机系统的一致性分布式控制器





 工商网监
工商网监
评论