 定位模块(Location)之高精地图
定位模块(Location)之高精地图
生长之路往往风雨交加,真正的生长之美不在于人生最终的高度,而是生长的过程中,我们内心能否保持足够的沉静,行动能否保持足够的韧性。
高精度地图的层级可以分为两个:静态高精度地图和动态高精度地图。
静态高精度地图处于底层,是目前研发的重点:
静态图层:它一般是道路的三维建模信息,通常是道路的测绘数据,含有语义信息的车道模型、道路部件(Object)、道路属性三类矢量信息;
定位图层:用于多传感器定位的特征(feature)图层构成,主要是通过原始的点云地图,提取出来一些特征例如:建筑物、停车场的圆形石柱等固定不变的特征点,用来做点云匹配进一步来进行定位的图层
动态高精度地图则建立于静态高精度地图的基础之上:
语义图层:提供道路的结构化信息,例如车道线、交通标志、交通规则信息等;
动态图层:它主要包括实时动态信息,既有其他交通参与者的信息(如道路拥堵情况、施工情况、是否有交通事故、交通管制情况、天气情况等),也有交通参与物的信息(如红绿灯、人行横道等);
备注:本身对于高精地图制作是有各种不同的规则,因此在分层和结构上略有不同,但是高精地图应当包含的具体的信息大体是一致的。

高精度地图的高精度体现在两个方面:
高精度地图的绝对坐标精度更高,地图上某个目标和真实世界的事物之间的精度更高;
高精度地图所含有的道路交通信息元素更丰富和细致;
高精度地图还需要有准确的道路形状,并包括每个车道的坡度、曲率、航向、高程,侧倾的数据。车道线的种类、颜色;每条车道的限速要求、推荐速度;隔离带的宽度、材质;道路上的箭头、文字的内容、所在位置;红绿灯、人行横道等交通参与物的绝对地理坐标,物理尺寸以及他们的特质特性;所有这些信息也都需要准确反映在高精度地图之中。
普通的导航电子地图由于是辅助驾驶员做导航使用,其绝对坐标精度在10米左右就够用。而在自动驾驶领域,自动驾驶汽车需要精确知道自己在路上的位置。车辆与马路牙子、旁边的车道距离通常仅有几十厘米左右,因此高精度地图的绝对精度要求都在1米以内,而且横向的相对精度(比如车道和车道,车道和车道线的相对位置精度)往往还要更高。
审核编辑 :李倩
-
高精度
+关注
关注
1文章
525浏览量
25463 -
定位模块
+关注
关注
0文章
104浏览量
16366 -
自动驾驶
+关注
关注
784文章
13812浏览量
166447
原文标题:智能驾驶系统学习笔记-19——定位模块(Location)之高精地图第一篇
文章出处:【微信号:不架构的汽车电子电气,微信公众号:不架构的汽车电子电气】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
芯伯乐产品在GPS定位模块上的设计方案

蓝牙AOA定位模块主要应用前景如何?

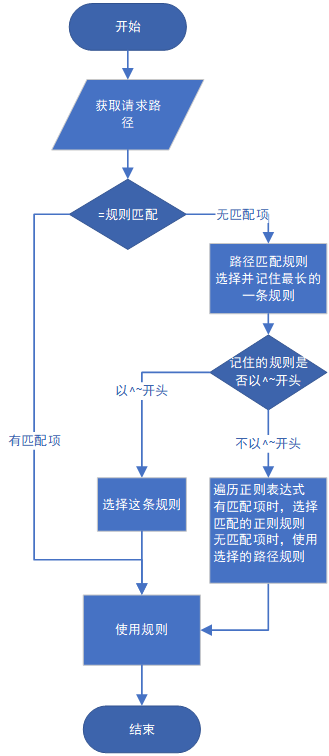
nginx中的正则表达式和location路径匹配指南
物联网系统中高精度RTK定位方案的实现_高精度定位模块

揭秘室内动态地图应用背后的技术原理与优势

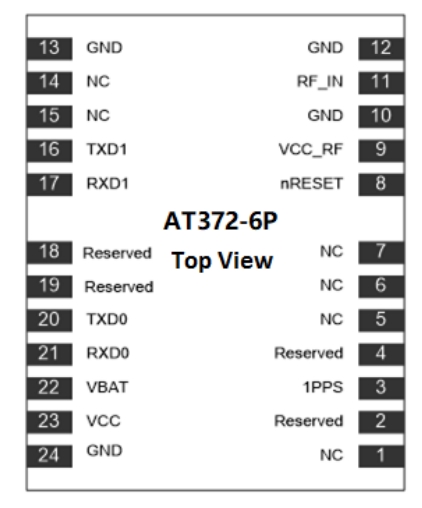
AT372-6P杭州中科微定位模块场景应用
基于精益思维的逆变器创新设计
怎么选人员定位技术?蓝牙人员定位技术的优势

自动驾驶仿真测试实践:高精地图仿真






 工商网监
工商网监
评论