 协同定位LS模型的凸性分析
协同定位LS模型的凸性分析
摘 要:精确的位置信息在无线传感网络(WSNs)中扮演着重要地位,基于用户节点之间信息交互的协同定位可以提供高精度定位,是目前非常有前景的研究方向。传统的协同定位模型,例如最小二乘(LS)模型,依赖于从先验测量信息中得到粗略的位置估计作为迭代初值。由于代价函数一般为非凸,该模型对迭代初值的选取十分敏感,计算结果容易陷入局部极值。为了深入解释这一现象,文中通过求取最小二乘代价函数的二阶导数,同时对相应的 Hessian 矩阵进行相似变换,分析了最小二乘代价函数的凸性,得出最小二乘代价函数为凸的一个充分不必要条件。同时利用数值仿真验证了当用户节点测距偏差全部为负数时,最小二乘代价函数在全局范围内为凸函数,这一结论为后续研究奠定了理论基础。
0 引 言
实时高精度位置感知在无人机技术、医疗服务、搜索救援、智能图书馆、自动驾驶等领域中有着广泛的应用[1⁃3]。近年来,作为传统无线传感网络(WirelessSensor Networks,WSNs)定位方法的补充,协同定位受到越来越多的关注。所谓的协同定位是指多用户节点之间的协同,与传统定位方法相比,该方法增加了用户节点之间的几何测量与通信。协同定位算法有很多,基于到达时间(Time of Arrival,TOA)的极大似然估计模型是应用最为广泛的定位模型之一,当测距误差服从高斯分布 时 ,极 大 似 然 模型与最小二乘估计模型(LeastSquare,LS)等价[4]。为了求得该模型的最优解,比较常见的算法为牛顿迭代法或高斯⁃牛顿迭代法。文献[5]给出了这两种算法的收敛性证明,指出收敛性与代价函数的凸性紧密相关,当目标函数为严格凸时(Hessian矩阵正定),由牛顿算法解算LS模型为强整体二阶收敛。
划分一个优化问题难易程度的分水岭在于其代价函数是凸或者非凸[6],而 LS 定位模型的代价函数一般为非凸,因此求解LS定位模型代价函数的全局最优解是困难的,属于NP难问题,目前已有相关研究尝试对这一个问题进行解决。文献[7⁃8]对单用户定位场景下的LS 模型进行了深入分析,提出了代价函数满足全局为凸的条件。LS模型基于最小方差准则(这一准则也是其他定位模型的基础),例如极大似然、加权最小二乘、递推最小二乘等。与此同时,相比递推最小二乘,卡尔曼滤波(Kalman Filtering,KF)模型相当于在两次迭代之间多了状态转移步骤,其核心也是通过最小化方差求得最优估计[9]。因此,对LS定位模型的凸性进行分析具有一定的代表性,其相关结论可以通过最小方差准则推广到其他定位模型。
在协同场景中,当用户节点数量增多时,函数的局部极值点增多,使得迭代算法对初值更加敏感并导致算法不收敛。本文将对协同定位LS模型的凸性进行分析,以深入解释这一现象。
1 无约束最小二乘定位模型
1.1 节点与链路定义
在基于TOA方法的定位场景中,设用户节点个数为M,用Fc={T1 , T2 ,⋯, TM}表示其编号的集合,用户节点真实坐标为xj∈Rη,1≤j≤M,j∈N+,η∈N+为定位场景欧几里得空间维度。锚节点的个数为N,其编号的集合为Fa={A1,A2,⋯,AN},锚节点真实坐标为si ∈Rη,1≤i≤N ,i∈N+。设所有节点的集合记为Ft,则Ft =Fa⋃Fc。在定位场景中,定义任意两点之间的距离观测为一条测距链路,假设某个场景中共有 L 条测距链路,记各个链路编号的集合为L={l1 , l2 ,⋯, lL}。定位场景中的测距链路可以分为两类:一类为用户与锚节点之间的测距链路(以下简记为 AT 链路);另一类为协同测距链路(以下简记为 TT 链路)。设所有链路距离观测值的集合记为 Dt,其中 AT链路距离观测值的集合记为 Da,TT链路距离观测值集合记为Dc,易知Dt=Da⋃Dc,Da⋂Dc=∅,并且有|Dt=L|,|Da=N|,|Dc= L - N|。令dK1K2是节点编号 K1到 K2点的真实距离,dK1K2为两点之间距离的估计值,其中 K1 ,K2 ∈ Ft。
1.2 测距偏差定义
由于信号在传播过程中会受到观测噪声、多径效应以及非视距(Non⁃Line of Sight,NLOS)传播的影响,观测值不等于节点之间的真实距离,存在测距偏差。设偏差向量为ε=[ε1,ε2,⋯,εL]T∈RL,其中εi表示第i条链路上的测距偏差。在视距(Line of Sight,LOS)传播环境中,测距偏差完全由观测噪声引起,其通常满足均值为零、方差为常数的高斯分布,用εLOS表示。在NLOS环境中,除了噪声以外还存在一个正偏差,假设此正偏差满足均值和方差都为常数的高斯分布,用εNLOS表示。基于以上假设,可以对测距偏差建模如下:

式中:
1.3 最小二乘模型定义
在非协同定位场景中,假设有M个用户节点,且任意两个用户节点之间无测距和数据交互。考虑某一用户节点Tj,其位置的真实值为xj,令xj表示Tj节点坐标的估计值,则有:
式中2表示两点之间的欧几里得距离。
若测距链路个数为N,分别记为l1 , l2 ,⋯, lN,令与之相对应的距离真实值与估计值分别为di和di,且有:
式中:1≤i≤N, i∈N+;qja是与节点Ti 相连接的链路个数。设距离观测值为ρi∈Da , 1≤i≤N, i∈N+,如果考虑偏差的存在,由定义可知,距离观测值与真实距离之间的关系为:

那么非协同场景中无约束LS估计模型可以表示成如下形式:

在非协同场景中,设Tj节点真实坐标和坐标估计值分别为xj和xj,那么有:
设测距链路有L条,分别记为l1 , l2 ,⋯,lN,与之相对应的距离真实值与估计值分别记为di和di 。若1≤i≤N,li为AT链路,按照式(3)对di和di 进行赋值。若N《i≤L,li为TT链路,按照式(7)进行赋值:
式中:qjc是链路端点为Tj Tk且满足k》j的TT链路个数,Tk∈Uj,k》j,j≥2,Uj为与Tj之间存在测距链路的用户节点的集合,其元素下标按由小到大的顺序进行排列。令Tk为 Uj中第g个元素,且 g的值按照式(8)进行计算:
设ρi∈Dt, 1≤i≤L, i∈N+ 为距离观测值,其与真实距离之间的关系满足式(4)。在此基础上构建协同场景无约束LS模型为:

在本文中统一称Fs和Fc为LS定位代价函数并且将其记为F。
2 模型的非凸性分析
2.1 非协同定位场景分析
为了便于分析且不失一般性,本文选取η=2。由凸分析相关理论可知,函数的凸性与其Hessian矩阵密切相关,并且有如下定理成立:
定理1[6]:函数为凸的二阶条件。假设x的函数f二阶可微,定义域domf为凸集且Hessian矩阵存在,则函数在domf中为凸的充要条件为:对于∀x∈domf,其Hessian矩阵为半正定矩阵。
首先求取代价函数Fs的梯度(一阶微分)和Hessian矩阵(二阶微分),计算结果分别如下:
运用定理1可以得出以下推论:推论1:当LS代价函数的dom Fs为R2时,其定义域为凸集。令∇2x1≽0,设满足此条件的所有x1的集合为A,则当x1∈A时,Fs为凸函数。
上述推论给出了LS代价函数为凸的一个充分必要条件。∇2x1为实对称矩阵,关于实对称矩阵有以下两个引理成立:
引理 1[10]:实对称矩阵的特征值均为实数。
引理 2[10]:实对称矩阵是半正定矩阵的充要条件为其所有特征值非负。
由引理2可知,对∇2x1半正定的判断可以转化为对其特征值正负的判断。设J=∇2x1,J∈R2 × 2,令Jij 为J 中各个元素,设J的特征值为λ,其特征多项式为:

令G=0,可以得到特征多项式方程为:

式(13)为一元二次方程,由引理1可知,此方程必存在2个实根,即根的判别式Δ≥0恒成立,函数2个非负实根的充分必要条件为:

推论2:所有满足不等式组(14)条件的x1的集合为A。
推论2是LS代价函数为凸的一个等价条件。然而,由于不等式组(14)的非线性特征,使得对该不等式组分析变得比较困难。下面将针对一类特殊的情况进行讨论,并且作出简要证明。
命题1:存在一个集合C,若该集合中所有估计值x1均满足di-ρi ≥ 0,则在此集合中最小二乘代价函数Fs为凸,且满足C⊆A。
引理3:有限个半正定矩阵的和仍为半正定矩阵。即若Ri≽0, 1≤i≤N, i∈N+,则有W=∑i=1N,Ri ≽ 0。
考虑对J进行分解,并且令J =∑i =1NQi
其中:
对Qi求特征值,令:

化简得:

因式分解可求得λ的2个根分别为:
从式(18)中可以看出,矩阵Qi有2个特征向量,其中λ1》0 恒成立,所以当λ2=di-ρi ≥0时,Qi ≽0。由引理3易知,当di-ρi≥0, 1≤i≤N, i∈N+ 成立时,J≽0。所有满足此条件的估计值x1的集合即为C。
命题1实际上是Fs局部为凸的一个充分不必要条件,Fs的非凸区间会随着εi 的增大而减小,且当满足εi》0的测距链路数量增多时,Fs的非凸性也会增强。
2.2 协同定位场景分析
在协同场景中,测距链路由AT链路和TT链路两部分组成。受引理3的启发,将Fc的 Hessian矩阵J分解为若干个子矩阵Qi,每一个Qi 实际上是一个与估计值相关的函数f(di)=(di-ρi2),子矩阵中的各个元素为f(di)对用户节点坐标的二阶偏导。在2.1节中,证明了当li为AT链路时满足命题1,接下来说明当li为TT链路也具有类似于命题1的性质。为了便于分析,选取协同场景中的某一条TT链路lk,记此链路两端的用户节点为Tm,Tn。其估计值分别为(xm,ym),(xn,yn),测距观测值为ρk,此时LS代价函数为:

分别对xm,xn,ym,yn求偏导,可得梯度向量(一阶微分)为:
则Hessian矩阵为:

求取J 的特征值,通过计算可以求得其特征多项式为:

可以解得其4个特征值分别为:

由式(23)可知,当dk-ρk≥0时,J≽0。接下来做进一步地推广,证明当LS代价函数中同时具有两种测距链路时,这一性质仍然不变。
设协同场景中有M个用户节点,记Fc的Hessian矩阵为J ,易知J∈R2M×2M 。对J进 行分解,并且令J=∑i=1LQi。其中,Qi 为每一个测距链路对应的Hessian矩阵。
引理4[11]:相似矩阵具有相同的特征值。
若测距链路位于锚节点与待定位节点之间,则Qi的元素位于对角线和与之相邻的位置上,且元素的个数为4,将 Qi 中的4个元素全部平移至左上角。设变换后的矩阵为Qi′,易知 Qi 与 Q i′ 为相似矩阵。由引理4可知Qi 与Qi′具有相同的特征值。设Gi′=λI-Qi′,为了求取G ′的特征值,对G ′作如下分块:

式中:
 中第k行l列元素。
中第k行l列元素。
由分块矩阵行列式定理可知[11]:
令|Gi′|=0,由非协同场景分析可知,|G11|=0的2个解分别为λ=1和λ=di-ρidi,|Gi′| 0的剩余(2M-2)个解均为 0。因此,当di -ρi≥0时,Qi≽0。
若测距链路位于两个待定位节点之间,易知Qi 中的元素个数为16个,将其中各个元素全部平移至左上角,将其记为Qi′,设Gi′=λI-Qi′。同样地,对Gi′进行分块:

式中:


gkl为Gi′中第k行l列元素。
由分块矩阵行列式定理可知:
令|Gi |=0。由协同链路分析可知,|G11|的特征值有4个,分别为λ1=λ2=0,λ3=4以及 λ4=4di-ρidi,|Gk′|=0 剩余(2M-4)个解均为0。因此,当di-ρi≥0时,Qi≽0。
命题1指出,在满足di-ρi≥0这一条件时,总可以找到合适的区间,在区间中LS代价函F为凸。
命题2:对于∀i , 若di-ρi≥0在x̂=[x1,x2,⋯, xM ]T∈R2M上恒成立,则F在R2M上为凸函数。
命题2是LS代价函数全局为凸的一个充分不必要条件。在实际场景中,当测距偏差大于 0时,距离观测值ρi为正,在此情况下不满足全局为凸的条件,若εi≤-di,则ρi≤0,此时di-ρi≥0恒成立,Fs在全局范围内为凸。
3 仿真验证
3.1 仿真场景设定
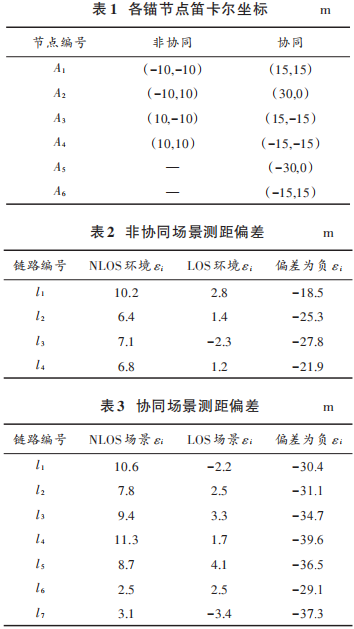
在二维平面内建立笛卡尔坐标系,表1给出了非协同与协同场景各个锚节点的平面坐标。本节将对三种偏差环境进行仿真,分别为NLOS环境、LOS环境以及测距偏差为负的情形。每一个场景在各种情况下的偏差大小如表2和表3所示。
3.2 凸性验证
首先对Fs作全局仿真。考虑测距误差不同的情况下代价函数Fs的凸性,作出其函数图像、Hessian矩阵J的正定图像以及选取不同初值的迭代情况,仿真结果如图1~图3所示。
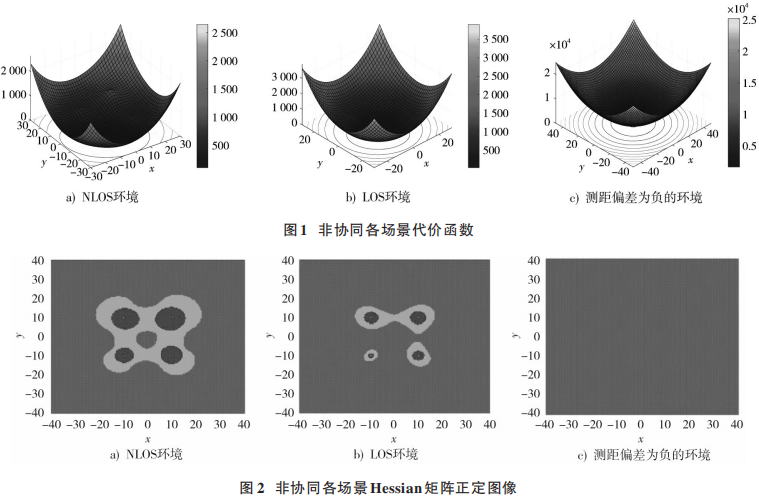
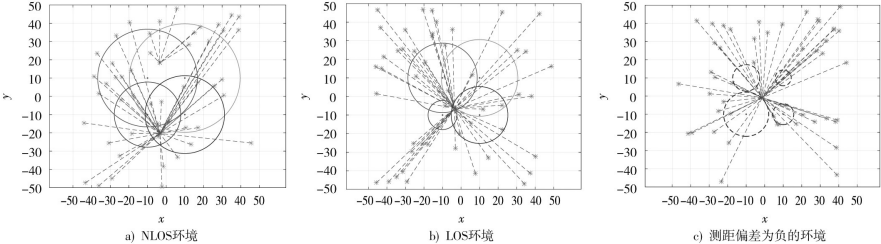
图1分别显示了NLOS环境、LOS环境以及测距偏差为负的环境下LS代价函数图像。
图2分别显示了二维平面中各个点Hessian矩阵J的半正定情况,其中红色部分表示J≽0,蓝色部分表示J≼0,绿色部分表示不定。
由定理1可知,当J为半正定时,函数为凸。从图2a)中可以看出,当定位环境为 NLOS 环境时,J的半正定区域不连续,不定与半负定面积总和较大,当定位环境为LOS环境时,J的半正定区域连续,不定与半负定面积总和较小。由命题2可知,当存在正的测距误差时,则代价函数 Fs 在全局范围内为非凸,因此在上述的两个定位环境中,Fs 在全局范围内均为非凸,如图1a)和图1b)所示。当测距误差为负且绝对值较大时,满足命题2中代价函数 Fs 为凸的全局条件,如图1c)和图2c)所示,由J 的半正定性和Fs函数图像可以看出,J在全局范围内半正定且 Fs在全局范围内为凸函数。
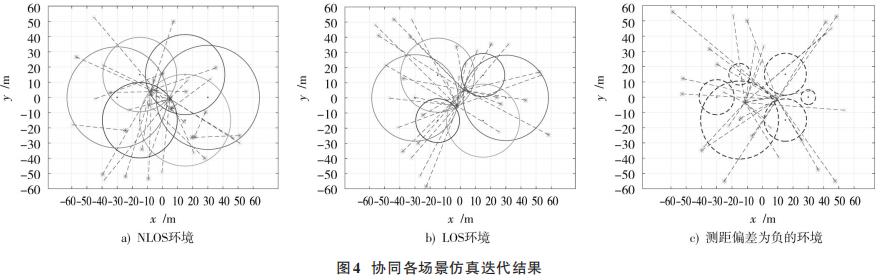
为了说明初值选取对迭代结果的影响,从各个方向选取不同的初值,用高斯⁃牛顿迭代法进行位置解算。解算结果如图3所示,其中虚线构成的圆表示测距半径为负,其大小为距离观测值的绝对值。从仿真结果可知,在NLOS环境中,LS代价函数Fs为非凸函数,存在多个极值点,当初始值不同时迭代算法会收敛到不同的极小值点;在LOS环境中测距偏差较小,LS代价函数在全局范围内为非凸,但其极值点个数并没有增加,在这种情况下迭代算法会收敛于同一个位置,说明LS模型在LOS场景中适用;在偏差为负的场景中,迭代结果与初始位置无关,验证了在此情况下Fs具有全局收敛的特性。
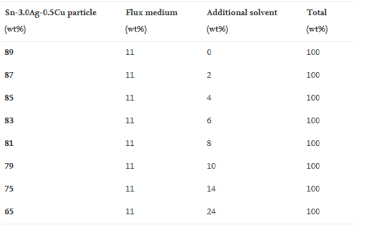
在协同场景中,选取不同的初值,利用高斯⁃牛顿迭代算法解算用户位置,仿真结果分别如图4所示。在NLOS定位环境中,由于存在较大的正测距误差,使得Fc在全局范围内非凸并且导致产生了多个极值点,因此不同的初始值会导致算法迭代收敛到不同的极值点上;在LOS定位环境中,Fc在全局范围内为非凸,但正测距偏差较小,因此仍然可以收敛到相同的极值点上;在测距偏差为负的情况下,Fc在全局范围内为凸,因此无论初值如何选取,其必然会收敛到全局最优解。此结果较好地验证了命题2的正确性。
4 结 语
本文对协同定位无约束LS定位模型进行了凸性分析。通过对代价函数的 Hessian矩阵的分析,得出了无约束LS代价函数的一个充分不必要条件,该条件指出,当测距偏差全部为负时,无约束LS定位代价函数全局为凸。在此基础上,分别对NLOS环境、LOS环境以及测距偏差为负环境下的LS代价函数凸性进行了仿真分析,验证了该命题的正确性。除此以外,本文提出影响最小二乘代价函数非凸性的主要因素为正测距偏差,为后续研究奠定了理论基础。
审核编辑 :李倩
-
高精度
+关注
关注
1文章
525浏览量
25463 -
函数
+关注
关注
3文章
4331浏览量
62618 -
模型
+关注
关注
1文章
3243浏览量
48840
原文标题:论文速览 | 协同定位最小二乘凸性分析
文章出处:【微信号:现代电子技术,微信公众号:现代电子技术】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「大模型启示录」阅读体验】营销领域大模型的应用
什么是晶圆微凸点封装?
深度学习模型的鲁棒性优化
晶圆上的‘凸’然惊喜:甲酸回流工艺大揭秘

AI模型托管原理分析
如何部署北斗定位应用,基于国产自主架构LS2K1000LA-i处理器平台
使用AI大模型进行数据分析的技巧
晶圆微凸点技术在先进封装中的应用

化工厂人员定位采用多种定位技术的融合定位系统的好处

SN54LS696、SN54LS697、SN54LS699、SN74LS696、SN74LS697、sn74ls 699同步递增/递减计数器手册

【大语言模型:原理与工程实践】大语言模型的评测
【大语言模型:原理与工程实践】大语言模型的预训练
使用cube-AI分析模型时报错的原因有哪些?
锡膏合金比例对焊接凸点的影响





 工商网监
工商网监
评论