 基于MM32生态实现I2C接口通讯的几种方式
基于MM32生态实现I2C接口通讯的几种方式
虽然从I2C特性上知晓具有不同I2C地址的器件是可以挂载在同一个I2C总线上进行通讯的,但是,如果需要操作的I2C器件地址冲突呢?MCU的硬件I2C接口数量不够呢?或者说MCU的I2C不支持从机多地址通讯功能呢?这时候,我们还是需要通过GPIO口来模拟I2C时序完成I2C主机/从机的功能。所以,并不是有了硬件I2C,软件I2C就没有发挥的空间了,恰恰是软件和硬件这两种实现方式共存互相补充。
- 硬件I2C主机通讯
- 软件模拟I2C主机通讯
- 硬件I2C从机通讯
- 软件模拟I2C从机通讯(有难度)
- I2C总线协议转换器/并行总线;
- 半双工同步操作;
- 支持主从模式;
- 支持7位地址和10位地址;
- 支持标准模式100kbps、快速模式400kbps;
- 产生Start、Stop、Repeated Start,以及Acknowledge信号检测;
- 在主机模式下只支持一个主机;
- 分别有2个字节的发送和接收缓冲;
- 在SCL和SDA上增加了无毛刺电路;
- 支持DAM、中断和查询操作方式;
- MM32F0140系列MCU在MM32F032的基础上I2C做了更丰富的功能,支持多从机地址通讯的功能、支持时钟延展等等……具体的可以参考官方的数据手册。
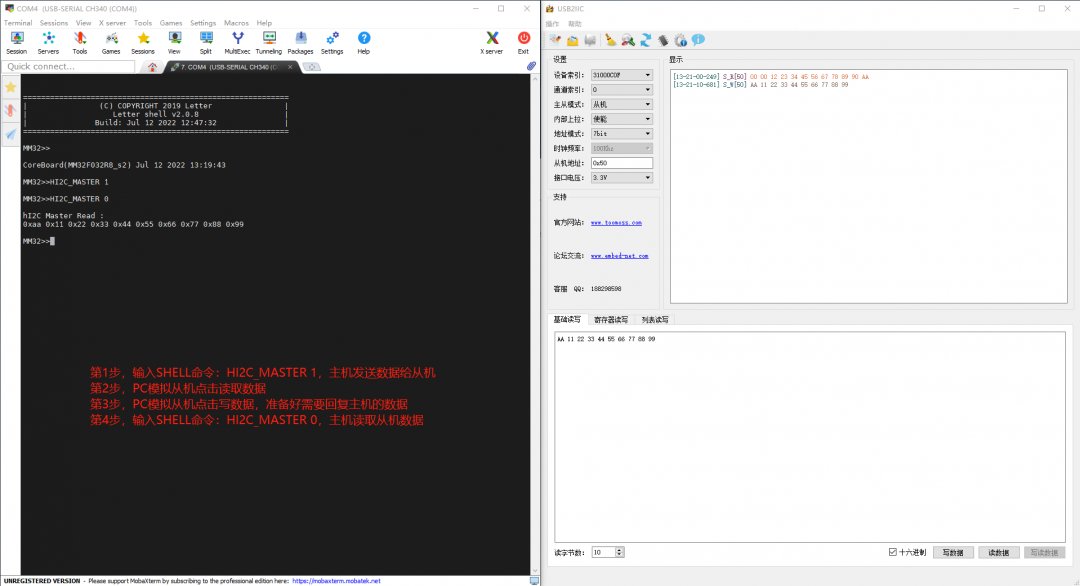
一、硬件I2C主机通讯
MM32的硬件I2C是我使用到现在,在代码程序段操作最为简洁的了;不需要再去考虑START信号、ACK信号,以及各种EVENT事件等……这些复杂的操作、或者是可以省略的操作都由官方的底层库程序和芯片IP去实现了,让我们在设计驱动程序时变量简单了。对于硬件I2C主机的配置,我们只需要复用的GPIO端口引脚、I2C通讯参数,以及从机地址即可;然后就可以编程去读写I2C从机设备了,初始化配置及对I2C从机设备的读写操作的实现代码如下:实测结果如下所示:void hI2C_MASTER_Init(uint8_t SlaveAddress){GPIO_InitTypeDef GPIO_InitStructure;I2C_InitTypeDef I2C_InitStructure;RCC_APB1PeriphClockCmd(RCC_APB1ENR_I2C1, ENABLE);I2C_StructInit(&I2C_InitStructure);I2C_InitStructure.I2C_Mode = I2C_Mode_MASTER;I2C_InitStructure.I2C_OwnAddress = 0;I2C_InitStructure.I2C_Speed = I2C_Speed_STANDARD;I2C_InitStructure.I2C_ClockSpeed = 100000;I2C_Init(I2C1, &I2C_InitStructure);I2C_Send7bitAddress(I2C1, SlaveAddress, I2C_Direction_Transmitter);I2C_Cmd(I2C1, ENABLE);RCC_AHBPeriphClockCmd(RCC_AHBENR_GPIOB, ENABLE);GPIO_PinAFConfig(GPIOB, GPIO_PinSource6, GPIO_AF_1);GPIO_PinAFConfig(GPIOB, GPIO_PinSource7, GPIO_AF_1);GPIO_StructInit(&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;GPIO_Init(GPIOB, &GPIO_InitStructure);}void hI2C_MASTER_Read(uint8_t Address, uint8_t *Buffer, uint8_t Length){uint8_t flag = 0, count = 0;I2C_SendData(I2C1, Address);while(!I2C_GetFlagStatus(I2C1, I2C_STATUS_FLAG_TFE));for(uint8_t i = 0; i < Length; i++){while(1){if((I2C_GetFlagStatus(I2C1, I2C_STATUS_FLAG_TFNF)) && (flag == 0)){I2C_ReadCmd(I2C1); count++;if(count == Length) flag = 1;}if(I2C_GetFlagStatus(I2C1, I2C_STATUS_FLAG_RFNE)){Buffer[i] = I2C_ReceiveData(I2C1); break;}}}I2C_GenerateSTOP(I2C1, ENABLE);while(!I2C_GetFlagStatus(I2C1, I2C_FLAG_STOP_DET));}void hI2C_MASTER_Write(uint8_t Address, uint8_t *Buffer, uint8_t Length){I2C_SendData(I2C1, Address);while(!I2C_GetFlagStatus(I2C1, I2C_STATUS_FLAG_TFE));for(uint8_t i = 0; i < Length; i++){I2C_SendData(I2C1, *Buffer++);while(!I2C_GetFlagStatus(I2C1, I2C_STATUS_FLAG_TFE));}I2C_GenerateSTOP(I2C1, ENABLE);while(!I2C_GetFlagStatus(I2C1, I2C_FLAG_STOP_DET));}void hI2C_MASTER_SHELL_Handler(uint8_t Mode){uint8_t Buffer[10] = {0x12, 0x23, 0x34, 0x45, 0x56, 0x67, 0x78, 0x89, 0x90, 0xAA};if(Mode == 1){hI2C_MASTER_Write(0x00, Buffer, sizeof(Buffer));}else{hI2C_MASTER_Read(0x00, Buffer, sizeof(Buffer));printf(" hI2C Master Read : ");for(uint8_t i = 0; i < sizeof(Buffer); i++){printf("0x%02x ", Buffer[i]);}printf(" ");}}SHELL_EXPORT_CMD(HI2C_MASTER, hI2C_MASTER_SHELL_Handler, Hardware I2C Master Read And Write);
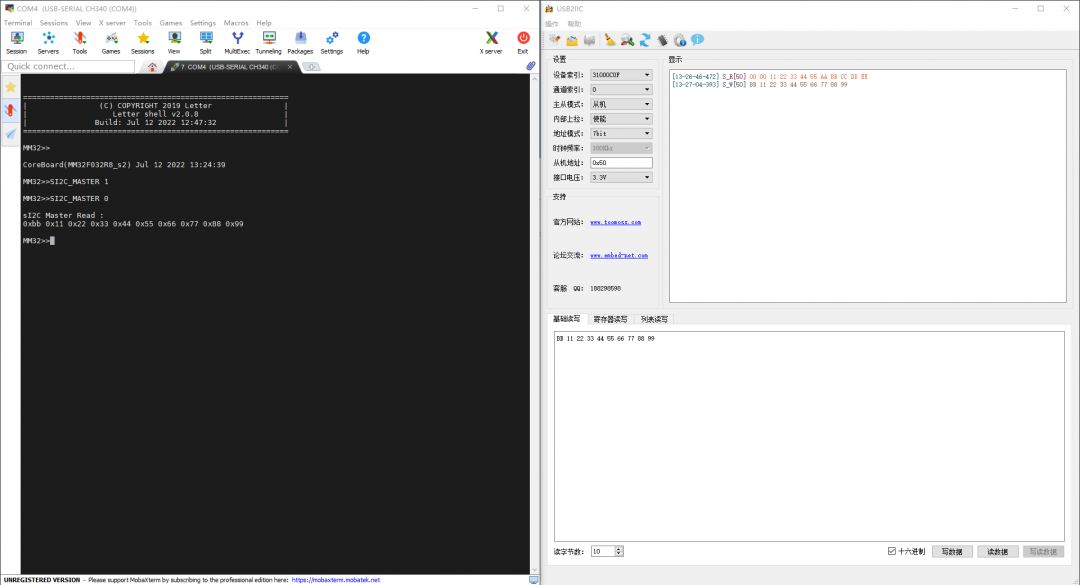
二、软件模拟I2C主机通讯
对于软件模拟I2C主机通讯的实现方式,主要是通过操作GPIO端口引脚的高低电平,在满足I2C通讯时序的要求上完成对I2C从机设备的读写操作;在实现软件模拟I2C主机时,需要正确的产生Start起始条件、Stop停止条件,以及Restart重启条件;需要在适当的位置对GPIO端口引脚的输入输出状态进行配置,以便能够正确的判断出ACK和NACK的应答信号;需要正确操作发送的字节格式,使地址内容、数据内容能够被正确识别……
如下的软件模拟I2C主机的实现方式通过定义了一个操作结构体,通过传递操作实例的方式,让软件模拟I2C主机的程序实现了面向对象的编程,借住同一段实现代码,可以同时实现多个软件模拟I2C主机通讯接口,在代码实现上大大的节省了空间,同时也让代码的可移植性变得更加通用,具体的代码实现如下所示:
实测结果如下所示:typedef struct{uint32_t SCL_RCC;GPIO_TypeDef *SCL_GPIO;uint16_t SCL_PIN;uint32_t SDA_RCC;GPIO_TypeDef *SDA_GPIO;uint16_t SDA_PIN;uint32_t TIME;uint8_t SlaveAddress;} sI2C_MASTER_TypeDef;sI2C_MASTER_TypeDef sI2C_MASTER ={RCC_AHBENR_GPIOB, GPIOB, GPIO_Pin_6,RCC_AHBENR_GPIOB, GPIOB, GPIO_Pin_7,100,0xA0};#define sI2C_MASTER_SCL_H(sI2C) GPIO_WriteBit(sI2C->SCL_GPIO, sI2C->SCL_PIN, Bit_SET)#define sI2C_MASTER_SCL_L(sI2C) GPIO_WriteBit(sI2C->SCL_GPIO, sI2C->SCL_PIN, Bit_RESET)#define sI2C_MASTER_SDA_H(sI2C) GPIO_WriteBit(sI2C->SDA_GPIO, sI2C->SDA_PIN, Bit_SET)#define sI2C_MASTER_SDA_L(sI2C) GPIO_WriteBit(sI2C->SDA_GPIO, sI2C->SDA_PIN, Bit_RESET)#define sI2C_MASTER_SCL_GET(sI2C) GPIO_ReadOutputDataBit(sI2C->SCL_GPIO, sI2C->SCL_PIN)#define sI2C_MASTER_SDA_GET(sI2C) GPIO_ReadInputDataBit( sI2C->SDA_GPIO, sI2C->SDA_PIN)void sI2C_MASTER_Delay(uint32_t Tick){while(Tick--);}void sI2C_MASTER_SDA_SetDirection(sI2C_MASTER_TypeDef *sI2C, uint8_t Direction){GPIO_InitTypeDef GPIO_InitStructure;RCC_AHBPeriphClockCmd(sI2C->SDA_RCC, ENABLE);GPIO_StructInit(&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = sI2C->SDA_PIN;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;if(Direction) /* Input */{GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;}else /* Output */{GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;}GPIO_Init(sI2C->SDA_GPIO, &GPIO_InitStructure);}void sI2C_MASTER_SCL_SetDirection(sI2C_MASTER_TypeDef *sI2C, uint8_t Direction){GPIO_InitTypeDef GPIO_InitStructure;RCC_AHBPeriphClockCmd(sI2C->SCL_RCC, ENABLE);GPIO_StructInit(&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = sI2C->SCL_PIN;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;if(Direction) /* Input */{GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;}else /* Output */{GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;}GPIO_Init(sI2C->SCL_GPIO, &GPIO_InitStructure);}void sI2C_MASTER_GenerateStart(sI2C_MASTER_TypeDef *sI2C){sI2C_MASTER_SDA_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME);sI2C_MASTER_SCL_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME);sI2C_MASTER_SDA_L(sI2C); sI2C_MASTER_Delay(sI2C->TIME);sI2C_MASTER_SCL_L(sI2C); sI2C_MASTER_Delay(sI2C->TIME);}void sI2C_MASTER_GenerateStop(sI2C_MASTER_TypeDef *sI2C){sI2C_MASTER_SDA_L(sI2C); sI2C_MASTER_Delay(sI2C->TIME);sI2C_MASTER_SCL_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME);sI2C_MASTER_SDA_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME);}void sI2C_MASTER_PutACK(sI2C_MASTER_TypeDef *sI2C, uint8_t ack){if(ack) sI2C_MASTER_SDA_H(sI2C); /* NACK */else sI2C_MASTER_SDA_L(sI2C); /* ACK */sI2C_MASTER_Delay(sI2C->TIME);sI2C_MASTER_SCL_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME);sI2C_MASTER_SCL_L(sI2C); sI2C_MASTER_Delay(sI2C->TIME);}uint8_t sI2C_MASTER_GetACK(sI2C_MASTER_TypeDef *sI2C){uint8_t ack = 0;sI2C_MASTER_SDA_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME);sI2C_MASTER_SDA_SetDirection(sI2C, 1);sI2C_MASTER_SCL_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME);ack = sI2C_MASTER_SDA_GET(sI2C);sI2C_MASTER_SCL_L(sI2C); sI2C_MASTER_Delay(sI2C->TIME);sI2C_MASTER_SDA_SetDirection(sI2C, 0);return ack;}uint8_t sI2C_MASTER_ReadByte(sI2C_MASTER_TypeDef *sI2C){uint8_t Data = 0;sI2C_MASTER_SDA_H(sI2C); /* Must set SDA before read */sI2C_MASTER_SDA_SetDirection(sI2C, 1);for(uint8_t i = 0; i < 8; i++){sI2C_MASTER_SCL_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME);Data <<= 1;if(sI2C_MASTER_SDA_GET(sI2C)) Data |= 0x01;sI2C_MASTER_SCL_L(sI2C); sI2C_MASTER_Delay(sI2C->TIME);}sI2C_MASTER_SDA_SetDirection(sI2C, 0);return Data;}void sI2C_MASTER_WriteByte(sI2C_MASTER_TypeDef *sI2C, uint8_t Data){for(uint8_t i = 0; i < 8; i++){if(Data & 0x80) sI2C_MASTER_SDA_H(sI2C);else sI2C_MASTER_SDA_L(sI2C);Data <<= 1;sI2C_MASTER_SCL_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME);sI2C_MASTER_SCL_L(sI2C); sI2C_MASTER_Delay(sI2C->TIME);}}void sI2C_MASTER_Init(sI2C_MASTER_TypeDef *sI2C){sI2C_MASTER_SDA_SetDirection(sI2C, 0);sI2C_MASTER_SCL_SetDirection(sI2C, 0);sI2C_MASTER_SCL_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME);sI2C_MASTER_SDA_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME);}uint8_t sI2C_MASTER_Read(sI2C_MASTER_TypeDef *sI2C, uint8_t Address, uint8_t *Buffer, uint8_t Length){if(Length == 0) return 0;sI2C_MASTER_GenerateStart(sI2C);sI2C_MASTER_WriteByte(sI2C, sI2C->SlaveAddress);if(sI2C_MASTER_GetACK(sI2C)){sI2C_MASTER_GenerateStop(sI2C); return 1;}sI2C_MASTER_WriteByte(sI2C, Address);if(sI2C_MASTER_GetACK(sI2C)){sI2C_MASTER_GenerateStop(sI2C); return 1;}sI2C_MASTER_GenerateStart(sI2C);sI2C_MASTER_WriteByte(sI2C, sI2C->SlaveAddress + 1);if(sI2C_MASTER_GetACK(sI2C)){sI2C_MASTER_GenerateStop(sI2C); return 1;}while(1){*Buffer++ = sI2C_MASTER_ReadByte(sI2C);if(--Length == 0){sI2C_MASTER_PutACK(sI2C, 1); break;}sI2C_MASTER_PutACK(sI2C, 0);}sI2C_MASTER_GenerateStop(sI2C);return 0;}uint8_t sI2C_MASTER_Write(sI2C_MASTER_TypeDef *sI2C, uint8_t Address, uint8_t *Buffer, uint8_t Length){uint8_t i = 0;if(Length == 0) return 0;sI2C_MASTER_GenerateStart(sI2C);sI2C_MASTER_WriteByte(sI2C, sI2C->SlaveAddress);if(sI2C_MASTER_GetACK(sI2C)){sI2C_MASTER_GenerateStop(sI2C); return 1;}sI2C_MASTER_WriteByte(sI2C, Address);if(sI2C_MASTER_GetACK(sI2C)){sI2C_MASTER_GenerateStop(sI2C); return 1;}for(i = 0; i < Length; i++){sI2C_MASTER_WriteByte(sI2C, *Buffer++);if(sI2C_MASTER_GetACK(sI2C)) break;}sI2C_MASTER_GenerateStop(sI2C);if(i == Length) return 0;else return 1;}void sI2C_MASTER_SHELL_Handler(uint8_t Mode){uint8_t Buffer[10] = {0x11, 0x22, 0x33, 0x44, 0x55, 0xAA, 0xBB, 0xCC, 0xDD, 0xEE};if(Mode == 1){sI2C_MASTER_Write(&sI2C_MASTER, 0x00, Buffer, sizeof(Buffer));}else{sI2C_MASTER_Read(&sI2C_MASTER, 0x00, Buffer, sizeof(Buffer));printf(" sI2C Master Read : ");for(uint8_t i = 0; i < sizeof(Buffer); i++){printf("0x%02x ", Buffer[i]);}printf(" ");}}SHELL_EXPORT_CMD(SI2C_MASTER, sI2C_MASTER_SHELL_Handler, Software I2C Master Read And Write);
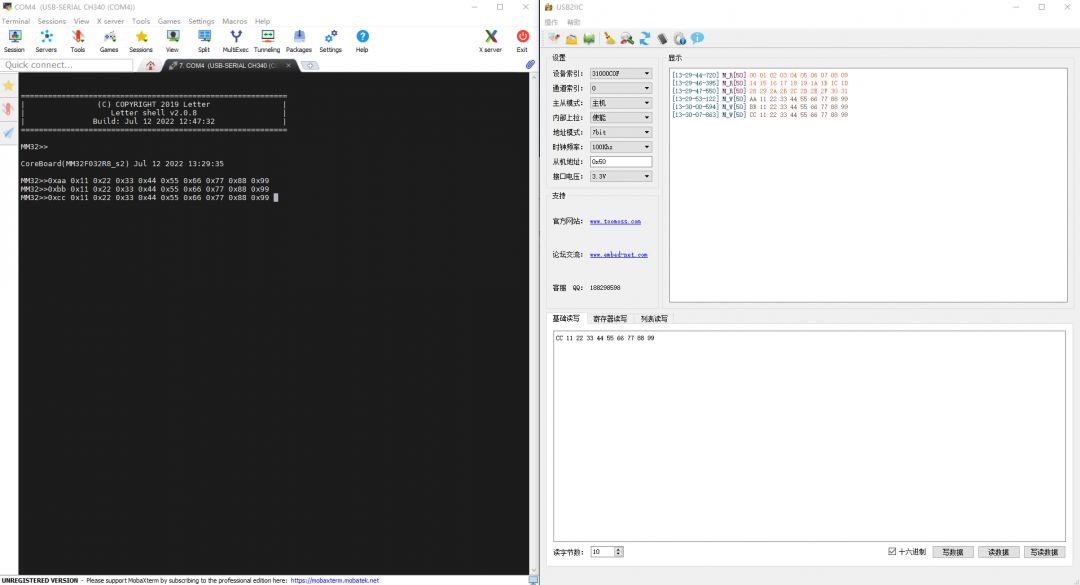
三、硬件I2C从机通讯
对于硬件I2C从机通讯来说,更多的是采用中断的响应方式来避免程序在某一处一直等待I2C主机的操作;而轮询的方式很容易捕捉不到I2C的请求或者事件;所以如下硬件I2C从机通讯的方式使用的就是中断处理方式,I2C主机任何操作和请求都会映射成对应的中断,待从机检测到了之后,进入中断进行相应的处理,同时中断的方式也保证了通讯的正常和稳定性。
现在市面上很多MCU的I2C从机模式都支持多地址模式,但每家的IP功能设计都不一样:有些是直接通过寄存器设置从机地址方式,这种方式限制了所支持从机地址的个数;有些是通过地址掩码的方式(类似于CAN通讯的ID滤波器),通过逐位比较的方式来判别所支持的I2C从机地址,这种方式可以支持很多个从机地址;第二种方式相比于第一种实现方式更灵活,支持的从机设备地址也更多!
MM32F032不支持多地址从机功能,但MM32F0140支持从机多地址通讯,可以根据实际项目需求选择对应的芯片型号;从机多地址功能采用的是地址掩码方式来过滤从机地址的,这样可以支持更多的从机设备地址;通过设置从机设备地址和从机地址掩码来实现从机多地址通讯功能;硬件I2C从机通讯具体的代码实现如下:
实测结果如下所示:void hI2C_SLAVE_Init(uint8_t SlaveAddress){I2C_InitTypeDef I2C_InitStructure;GPIO_InitTypeDef GPIO_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;QUEUE_INIT(QUEUE_HI2C_SLAVE_IDX);RCC_APB1PeriphClockCmd(RCC_APB1ENR_I2C1, ENABLE);I2C_StructInit(&I2C_InitStructure);I2C_InitStructure.Mode = I2C_Mode_SLAVE;I2C_InitStructure.OwnAddress = 0;I2C_InitStructure.Speed = I2C_Speed_FAST;I2C_InitStructure.ClockSpeed = 400000;I2C_Init(I2C1, &I2C_InitStructure);I2C_ITConfig(I2C1, I2C_IT_RD_REQ, ENABLE);I2C_ITConfig(I2C1, I2C_IT_RX_FULL, ENABLE);I2C_Cmd(I2C1, ENABLE);RCC_AHBPeriphClockCmd(RCC_AHBENR_GPIOB, ENABLE);GPIO_PinAFConfig(GPIOB, GPIO_PinSource6, GPIO_AF_1);GPIO_PinAFConfig(GPIOB, GPIO_PinSource7, GPIO_AF_1);GPIO_StructInit(&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_FLOATING;GPIO_Init(GPIOB, &GPIO_InitStructure);GPIO_StructInit(&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;GPIO_Init(GPIOB, &GPIO_InitStructure);NVIC_InitStructure.NVIC_IRQChannel = I2C1_IRQn;NVIC_InitStructure.NVIC_IRQChannelPriority = 0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);I2C_SendSlaveAddress(I2C1, SlaveAddress);}void I2C1_IRQHandler(void){static uint8_t Data = 0;if(I2C_GetITStatus(I2C1, I2C_IT_RD_REQ) != RESET){I2C_ClearITPendingBit(I2C1, I2C_IT_RD_REQ);while(1){I2C_SendData(I2C1, Data++);while(I2C_GetFlagStatus(I2C1, I2C_FLAG_TX_EMPTY) == RESET);if((Data % 10) == 0){I2C_GenerateSTOP(I2C1, ENABLE); break;}}}if(I2C_GetITStatus(I2C1, I2C_IT_RX_FULL) != RESET){QUEUE_WRITE(QUEUE_HI2C_SLAVE_IDX, I2C_ReceiveData(I2C1));}}
四、软件模拟I2C从机通讯
软件模拟I2C从机通讯是I2C通讯时序逆向的实现过程,它需要通过捕捉I2C主机的信号时序对主机的事件、请求,以及发送过来的数据进行解析,又要正确的回复I2C主机,所以它的实现方式比I2C模拟主机完全不同。这需要开发者对I2C时序十分熟悉,所以在研读下面软件模拟I2C从机通讯程序时,建议对照I2C时序一点点分析(提示:这部分内容有点难度)。
对于软件模拟I2C从机通讯的实现是通过两个GPIO端口引脚分别与I2C主机的SCL和SDA进行连接,程序中将这两个GPIO端口引脚配置成外部中断EXTI工作模式,通过捕获GPIO端口引脚的上升沿、下降沿,以及高低电平状态,配合软件模拟I2C从机的状态管理,实现与I2C主机之间的通讯功能,在如下的程序中添加了详细的注释和说明,方便大家阅读和理解,具体的代码实现如下:
实测结果如下所示:typedef struct{uint32_t SCL_RCC;GPIO_TypeDef *SCL_GPIO;uint16_t SCL_PIN;uint8_t SCL_EXTI_PortSource;uint8_t SCL_EXTI_PinSource;uint32_t SCL_EXTI_Line;uint32_t SDA_RCC;GPIO_TypeDef *SDA_GPIO;uint16_t SDA_PIN;uint8_t SDA_EXTI_PortSource;uint8_t SDA_EXTI_PinSource;uint32_t SDA_EXTI_Line;uint8_t SlaveAddress;} sI2C_SLAVE_TypeDef;sI2C_SLAVE_TypeDef sI2C_SLAVE ={RCC_AHBENR_GPIOB, GPIOB, GPIO_Pin_6, EXTI_PortSourceGPIOB, EXTI_PinSource6, EXTI_Line6,RCC_AHBENR_GPIOB, GPIOB, GPIO_Pin_7, EXTI_PortSourceGPIOB, EXTI_PinSource7, EXTI_Line7,0xA0,};#define sI2C_SLAVE_STATE_NA 0#define sI2C_SLAVE_STATE_STA 1#define sI2C_SLAVE_STATE_ADD 2#define sI2C_SLAVE_STATE_ADD_ACK 3#define sI2C_SLAVE_STATE_DAT 4#define sI2C_SLAVE_STATE_DAT_ACK 5#define sI2C_SLAVE_STATE_STO 6uint8_t sI2C_SLAVE_State = sI2C_SLAVE_STATE_NA;uint8_t sI2C_SLAVE_ShiftCounter = 0;uint8_t sI2C_SLAVE_SlaveAddress = 0;uint8_t sI2C_SLAVE_ReceivedData = 0;uint8_t sI2C_SLAVE_TransmitData = 0x50;uint8_t sI2C_SLAVE_TransmitBuffer[16] ={0x01, 0x12, 0x23, 0x34, 0x45, 0x56, 0x67, 0x78,0x89, 0x9A, 0xAB, 0xBC, 0xCD, 0xDE, 0xEF, 0xF0,};uint8_t sI2C_SLAVE_TransmitIndex = 0;bool sI2C_SLAVE_READ_SCL(sI2C_SLAVE_TypeDef *sI2C){return GPIO_ReadInputDataBit(sI2C->SCL_GPIO, sI2C->SCL_PIN);}bool sI2C_SLAVE_READ_SDA(sI2C_SLAVE_TypeDef *sI2C){return GPIO_ReadInputDataBit(sI2C->SDA_GPIO, sI2C->SDA_PIN);}/******************************************************************************** [url=home.php?mod=space&uid=247401]@brief[/url] 配置模拟I2C的GPIO端口, 默认设置成输入模式, 并使能相应的外部触发* 中断功能(上升沿和下降沿)* @param* @retval* [url=home.php?mod=space&uid=93590]@Attention[/url]*******************************************************************************/void sI2C_SLAVE_Init(sI2C_SLAVE_TypeDef *sI2C){GPIO_InitTypeDef GPIO_InitStructure;EXTI_InitTypeDef EXTI_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_AHBPeriphClockCmd(sI2C->SCL_RCC, ENABLE);RCC_AHBPeriphClockCmd(sI2C->SDA_RCC, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);GPIO_StructInit(&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = sI2C->SCL_PIN;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(sI2C->SCL_GPIO, &GPIO_InitStructure);GPIO_StructInit(&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = sI2C->SDA_PIN;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(sI2C->SDA_GPIO, &GPIO_InitStructure);SYSCFG_EXTILineConfig(sI2C->SCL_EXTI_PortSource, sI2C->SCL_EXTI_PinSource);EXTI_StructInit(&EXTI_InitStructure);EXTI_InitStructure.EXTI_Line = sI2C->SCL_EXTI_Line;EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising_Falling;EXTI_InitStructure.EXTI_LineCmd = ENABLE;EXTI_Init(&EXTI_InitStructure);SYSCFG_EXTILineConfig(sI2C->SDA_EXTI_PortSource, sI2C->SDA_EXTI_PinSource);EXTI_StructInit(&EXTI_InitStructure);EXTI_InitStructure.EXTI_Line = sI2C->SDA_EXTI_Line;EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising_Falling;EXTI_InitStructure.EXTI_LineCmd = ENABLE;EXTI_Init(&EXTI_InitStructure);NVIC_InitStructure.NVIC_IRQChannel = EXTI4_15_IRQn;NVIC_InitStructure.NVIC_IRQChannelPriority = 0x00;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);}/******************************************************************************** [url=home.php?mod=space&uid=247401]@brief[/url] 设置SDA信号线的输入输出方便, 0代表Output输出, 1代表Input输入* @param* @retval* [url=home.php?mod=space&uid=93590]@Attention[/url]*******************************************************************************/void sI2C_SLAVE_SDA_SetDirection(sI2C_SLAVE_TypeDef *sI2C, uint8_t Direction){GPIO_InitTypeDef GPIO_InitStructure;if(Direction) /* Input */{GPIO_StructInit(&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = sI2C->SDA_PIN;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(sI2C->SDA_GPIO, &GPIO_InitStructure);}else /* Output */{GPIO_StructInit(&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = sI2C->SDA_PIN;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;GPIO_Init(sI2C->SDA_GPIO, &GPIO_InitStructure);}}/******************************************************************************* @brief 设置SDA信号线的输出电平(高电平 / 低电平)* @param* @retval* @attention******************************************************************************/void sI2C_SLAVE_SDA_SetLevel(sI2C_SLAVE_TypeDef *sI2C, uint8_t Level){sI2C_SLAVE_SDA_SetDirection(sI2C, 0);if(Level){GPIO_WriteBit(sI2C->SDA_GPIO, sI2C->SDA_PIN, Bit_SET);}else{GPIO_WriteBit(sI2C->SDA_GPIO, sI2C->SDA_PIN, Bit_RESET);}}/******************************************************************************* @brief 当SCL触发上升沿外部中断时的处理* @param* @retval* @attention******************************************************************************/void sI2C_SLAVE_SCL_RiseHandler(sI2C_SLAVE_TypeDef *sI2C){/* SCL为上升沿, 数据锁定, 主从机从SDA总线上获取数据位 */switch(sI2C_SLAVE_State){case sI2C_SLAVE_STATE_ADD:/* I2C发送遵义MSB, 先发送高位, 再发送低位, 所以在接收的时候, 数据进行左移 */sI2C_SLAVE_SlaveAddress <<= 1;sI2C_SLAVE_ShiftCounter += 1;if(sI2C_SLAVE_READ_SDA(sI2C) == Bit_SET){sI2C_SLAVE_SlaveAddress |= 0x01;}/* 当接收到8位地址位后, 从机需要在第9个时钟给出ACK应答, 等待SCL下降沿的时候给出ACK信号 */if(sI2C_SLAVE_ShiftCounter == 8){sI2C_SLAVE_State = sI2C_SLAVE_STATE_ADD_ACK;}break;case sI2C_SLAVE_STATE_ADD_ACK:/* 从机地址的ACK回复后, 切换到收发数据状态 */sI2C_SLAVE_State = sI2C_SLAVE_STATE_DAT;sI2C_SLAVE_ShiftCounter = 0; /* 数据移位计数器清零 */sI2C_SLAVE_ReceivedData = 0; /* sI2C_SLAVE的接收数据清零 */break;case sI2C_SLAVE_STATE_DAT:if((sI2C_SLAVE_SlaveAddress & 0x01) == 0x00){/* 主机写操作:此时从机应该获取主机发送的SDA信号线电平状态, 进行位存储 */sI2C_SLAVE_ReceivedData <<= 1;sI2C_SLAVE_ShiftCounter += 1;if(sI2C_SLAVE_READ_SDA(sI2C) == Bit_SET){sI2C_SLAVE_ReceivedData |= 0x01;}/* 当收到一个完整的8位数据时, 将收到的数据存放到I2C接收消息队列中, 状态转换到给主机发送ACK应答 */if(sI2C_SLAVE_ShiftCounter == 8){QUEUE_WRITE(QUEUE_SI2C_SLAVE_IDX, sI2C_SLAVE_ReceivedData);sI2C_SLAVE_ShiftCounter = 0; /* 数据移位计数器清零 */sI2C_SLAVE_ReceivedData = 0; /* sI2C_SLAVE的接收数据清零 */sI2C_SLAVE_State = sI2C_SLAVE_STATE_DAT_ACK;}}else{/* 主机读操作:在SCL上升沿的时候, 主机获取当前SDA的状态位, 如果到了第8个数位的上升沿,* 那接下来就是主机回复从机的应答或非应答信号了, 所以将状态切换到等待ACK的状态, 同时准备下一个需要发送的数据*/if(sI2C_SLAVE_ShiftCounter == 8){sI2C_SLAVE_ShiftCounter = 0; /* sI2C_SLAVE的接收数据清零 */sI2C_SLAVE_TransmitData = sI2C_SLAVE_TransmitBuffer[sI2C_SLAVE_TransmitIndex++];sI2C_SLAVE_TransmitIndex %= 16;sI2C_SLAVE_State = sI2C_SLAVE_STATE_DAT_ACK;}}break;case sI2C_SLAVE_STATE_DAT_ACK:if((sI2C_SLAVE_SlaveAddress & 0x01) == 0x00){/* 主机写操作:从机发送ACK, 等待主机读取从机发送的ACK信号 */sI2C_SLAVE_State = sI2C_SLAVE_STATE_DAT; /* 状态切换到数据接收状态 */}else{/* 主机读操作:主机发送ACK, 从机可以读取主机发送的ACK信号 */uint8_t ack = sI2C_SLAVE_READ_SDA(sI2C);if(ack == Bit_RESET){sI2C_SLAVE_State = sI2C_SLAVE_STATE_DAT; /* 接收到 ACK, 继续发送数据 */}else{sI2C_SLAVE_State = sI2C_SLAVE_STATE_STO; /* 接收到NACK, 停止发送数据 */}}break;default:break;}}/******************************************************************************* @brief 当SCL触发下降沿外部中断时的处理* @param* @retval* @attention******************************************************************************/void sI2C_SLAVE_SCL_FallHandler(sI2C_SLAVE_TypeDef *sI2C){/* SCL为下降沿, 数据可变 */switch(sI2C_SLAVE_State){case sI2C_SLAVE_STATE_STA:/** 检测到START信号后, SCL第一个下降沿表示开始传输Slave Address,* 根据数据有效性的规则, 地址的第一位需要等到SCL变为高电平时才可以读取* 切换到获取Slave Address的状态, 等待SCL的上升沿触发*/sI2C_SLAVE_State = sI2C_SLAVE_STATE_ADD;sI2C_SLAVE_ShiftCounter = 0; /* 数据移位计数器清零 */sI2C_SLAVE_SlaveAddress = 0; /* sI2C_SLAVE的从机地址清零 */sI2C_SLAVE_ReceivedData = 0; /* sI2C_SLAVE的接收数据清零 */break;case sI2C_SLAVE_STATE_ADD:/** 在主机发送Slave Address的时候, 从机只是读取SDA状态, 进行地址解析, 所以这边没有处理*/break;case sI2C_SLAVE_STATE_ADD_ACK:/* SCL低电平的时候, 给I2C总线发送地址的应答信号, 状态不发生改变, 等待下一个上升沿将ACK发送出去 */sI2C_SLAVE_SDA_SetLevel(sI2C, 0); /* 将SDA信号拉低, 向主机发送ACK信号 */break;case sI2C_SLAVE_STATE_DAT:/* 在SCL时钟信号的下降沿, SDA信号线处理可变的状态 */if((sI2C_SLAVE_SlaveAddress & 0x01) == 0x00){/* 主机写操作:将SDA信号线设置成获取状态, 等待下一个SCL上升沿时获取数据位 */sI2C_SLAVE_SDA_SetDirection(sI2C, 1);}else{/* 主机读操作:根据发送的数据位设置SDA信号线的输出电平, 等待下一个SCL上升沿时发送数据位 */if(sI2C_SLAVE_TransmitData & 0x80){sI2C_SLAVE_SDA_SetLevel(sI2C, 1);}else{sI2C_SLAVE_SDA_SetLevel(sI2C, 0);}sI2C_SLAVE_TransmitData <<= 1;sI2C_SLAVE_ShiftCounter += 1;}break;case sI2C_SLAVE_STATE_DAT_ACK:/* 在第8个SCL时钟信号下降沿的处理 */if((sI2C_SLAVE_SlaveAddress & 0x01) == 0x00){/* 主机写操作:从机在接收到数据后, 需要给主机一个ACK应答信号, 状态不发生改变, 等待下一个上升沿将ACK发送出去 */sI2C_SLAVE_SDA_SetLevel(sI2C, 0); /* 将SDA信号拉低, 向主机发送ACK信号 */}else{/* 主机读操作:从机需要释放当前的SDA信号线, 以便主机发送ACK或NACK给从机, 状态不发生改变, 等待下一个上升沿读取ACK信号 */sI2C_SLAVE_SDA_SetDirection(sI2C, 1);}break;default:break;}}/*** @brief 当SDA触发上升沿外部中断时的处理* @param None* @retval None*/void sI2C_SLAVE_SDA_RiseHandler(sI2C_SLAVE_TypeDef *sI2C){if(sI2C_SLAVE_READ_SCL(sI2C) == Bit_SET) /* SCL为高时,SDA为上升沿:STOP */{sI2C_SLAVE_State = sI2C_SLAVE_STATE_STO;}else /* SCL为低时,SDA为上升沿:数据的变化 */{}}/*** @brief 当SDA触发下降沿外部中断时的处理* @param None* @retval None*/void sI2C_SLAVE_SDA_FallHandler(sI2C_SLAVE_TypeDef *sI2C){if(sI2C_SLAVE_READ_SCL(sI2C) == Bit_SET) /* SCL为高时,SDA为下降沿:START */{sI2C_SLAVE_State = sI2C_SLAVE_STATE_STA;}else /* SCL为低时,SDA为下降沿:数据的变化 */{}}/******************************************************************************** @brief* @param* @retval* @attention*******************************************************************************/void EXTI4_15_IRQHandler(void){/* I2C SCL */if(EXTI_GetITStatus(sI2C_SLAVE.SCL_EXTI_Line) != RESET){if(sI2C_SLAVE_READ_SCL(&sI2C_SLAVE) == Bit_SET){sI2C_SLAVE_SCL_RiseHandler(&sI2C_SLAVE);}else{sI2C_SLAVE_SCL_FallHandler(&sI2C_SLAVE);}EXTI_ClearITPendingBit(sI2C_SLAVE.SCL_EXTI_Line);}/* I2C SDA */if(EXTI_GetITStatus(sI2C_SLAVE.SDA_EXTI_Line) != RESET){if(sI2C_SLAVE_READ_SDA(&sI2C_SLAVE) == Bit_SET){sI2C_SLAVE_SDA_RiseHandler(&sI2C_SLAVE);}else{sI2C_SLAVE_SDA_FallHandler(&sI2C_SLAVE);}EXTI_ClearITPendingBit(sI2C_SLAVE.SDA_EXTI_Line);}}
-
通讯
+关注
关注
9文章
919浏览量
35210 -
I2C
+关注
关注
28文章
1499浏览量
125254 -
GPIO
+关注
关注
16文章
1221浏览量
52704 -
MM32
+关注
关注
1文章
106浏览量
859
发布评论请先 登录
相关推荐
I2C总线通信原理 如何设计I2C总线电路
I2C总线与Arduino的接口示例
I2C总线应用实例分析
UC-001:MicroConverter I2C兼容接口

AN-895: ADuC702x MicroConverter I2C接口
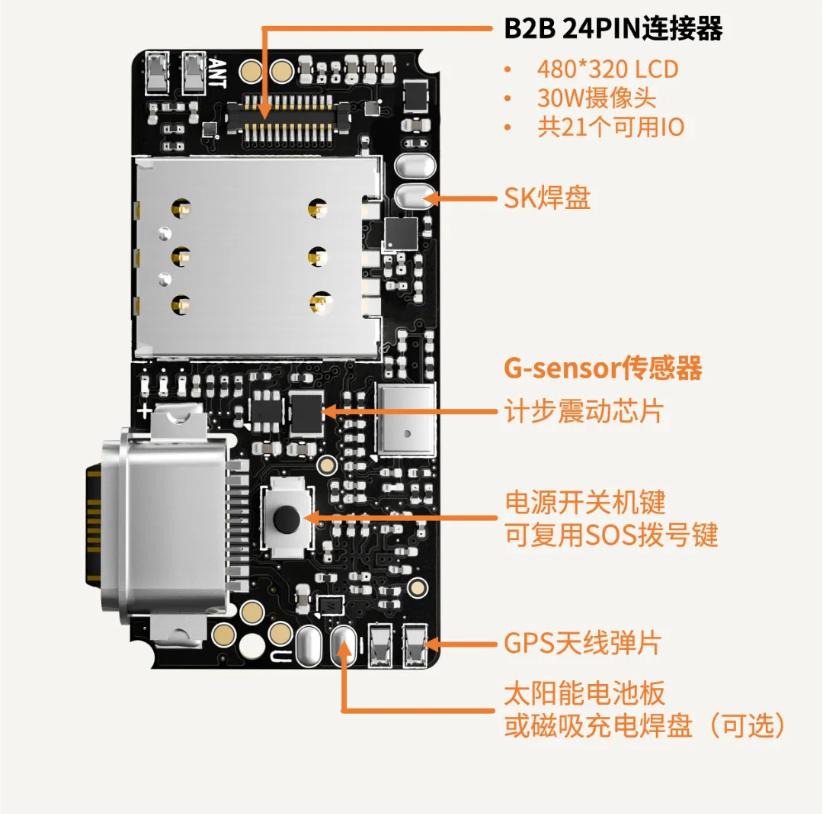
BTB扩展接口:LCD、Camera、UART、I2C等|详解篇
RISC V的I2C操作
物联网嵌入式软件中的I2C总线设计详解
I2C通讯为什么要用开漏输出和上拉电阻?

什么是I2C协议 I2C总线的控制逻辑







 工商网监
工商网监
评论