 航位推算,实现高精度车载导航定位
航位推算,实现高精度车载导航定位
电子发烧友网报道(文/李宁远)汽车在使用GPS或者GNSS定位时,需要同时接收到多个卫星信号才能保证精确定位。因此我们可以看到当汽车行驶到隧道等存在遮蔽的环境里时,GPS 或GNSS定位精度会出现不同程度的降低,甚至是完全丢失。
航位推算DR通常被用来弥补GPS 或GNSS的定位困难,在卫星定位精度降低的时候,航位推算通过使用来自各种传感器(陀螺仪传感器,加速度计,速度脉冲等)的信息来计算汽车当前位置,维持汽车的定位精度。
无联机航位推算的精准定位
航位推算最常见的是使用IMU来推算车辆的即时航向。借助该信息再加上行驶的距离,导航系统可以正确确定车辆的位置。高端汽车中的航位推算ADR是将GNSS数据与从安装在车身和车轮上的相关传感器收集到的位置信息相结合,然后进行定位推算。这种最精准的定位需要车辆自身数据网络集成度要足够高。
那在车辆自身数据网络集成度不那么高的情况下能否也实现比单GNSS更准确的定位呢?那就是无联机航位推算UDR。无联机航位推算可以实现比GNSS定位效果更好,且十分接近ADR。无联机航位推算这种办法并不需要与车辆网络连接起来,它只将惯性传感数据与GNSS数据结合起来推算得到车辆位姿信息。
无联机航位推算模块通过获取IMU的角度和加速度的精确测量数据在GNSS信号被干扰或者失真时提供即时的定位修正。目前的能够支持无联机航位推算的芯片或模块,车辆即使在没有地图匹配的情况下,位置精度也相当高,基本等同于车载导航精度。
特色技术下的航位推算芯片修正车辆位置信息
航位推算模块现在有不少供应商在做,而且都开始推出无联机航位推算功能。基本的原理都是相同的,具体的技术细节会有些不一样,比如SkyTraq Technology的S1722DR8,结合GNSS位置数据、陀螺仪数据(测量转角)和里程表数据(测量行驶距离)。-148dBm冷启动灵敏使它能够在极弱的信号环境中自动获取、跟踪和定位位置。SkyTraq Technology通过扩展卡尔曼滤波算法将GNSS和传感器数据与依赖于GNSS信号质量的加权函数相结合,降低误差效果显著。SkyTraq Technology去年推出的PX1120D则是集成6轴IMU和四核GNSS,前装应用提供wheel-tick融合航位推算,后装应用则是满足传感器融合级别的无联机航位推算,提供100%位置覆盖。

SkyTraq Technology
u-blox的NEO-M9V模块航位推算模块同样是IMU结合四核GNSS,提供无联机航位推算,运用的dead reckoning(死区计算)技术,相较于单个GNSS模块能够提升三倍精度,在常见的环境中能做到分米级别的精度。NEO-M9V也使用了耦合的卡尔曼滤波器将追踪精度的信息反馈到GNSS组件中,衡量所有GNSS和传感器信号。NEO-M9V还有一个特点,高刷新频率,提供实时的HNR。另外,模块集成的SAW/LNA缓解了一部分射频干扰。无联机航位推算模块里结合实时运动学(RTK)技术和校正服务的高精度算法在多频段中可实现高精度位置的快速收敛和重新收敛。

带-M9V模块航位推算模块的GNSS芯片,u-blox
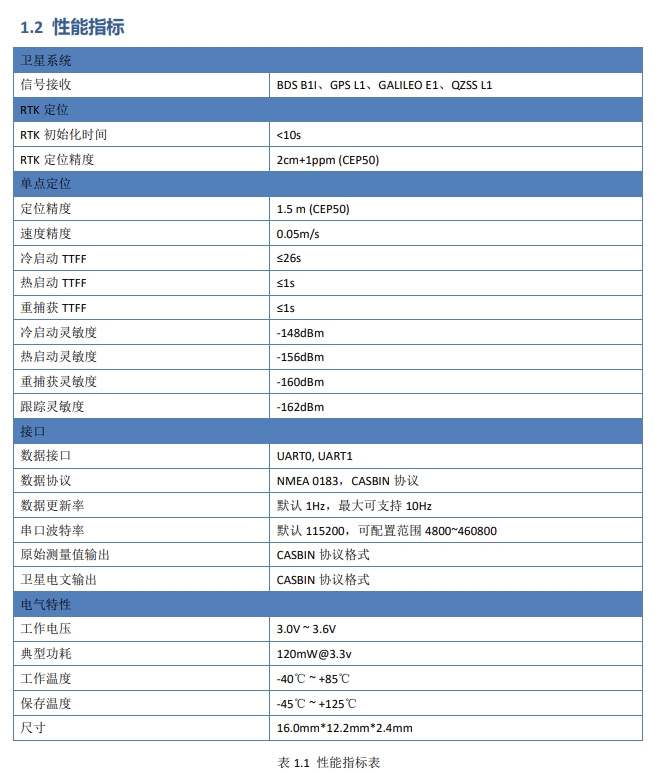
ST的Teseo III,Teseo-VIC3DA模块同样结合了6轴IMU与GNSS IC,内置航位推算,不仅功耗更低,还加入了更高精度的载波相位跟踪。-163dBm灵敏度跟踪能够实现1.5m CEP的精度定位。Teseo-VIC3DA 的航位推算定位速率高达30Hz,延迟很低,可以大幅减少UART通道抖动。ST硬件设计上的领先性在该模块里也得以体现,Teseo-VIC3DA在16.0 mm x 12.2 mm 的小尺寸内,由于板载提供了卓越的准确性温度补偿晶体振荡器(TCXO)和缩短的首次定位时间(TTFF)。
虽然各个不同厂商的航位推算模块使用的特色硬件、软件技术不一样,但是原理相同,都是通过收集传感器内部的数据计算出当前位置相对于上一次卫星定位的距离。当然,想实现高精度的航位推算对传感器的要求也很高,除了必要的精度之外,器件功耗必须要低,这样才能始终保持开启模式,并为航位推算提供数据。
如何进一步提高航位推算精度
从上面这些航位推算模块我们可以看到,IMU是相当重要的。IMU测量车辆的旋转速率,代表车辆即时航向的角度通过计算旋转速率的时间积分而求得,再结合航向和行驶距离即可以确定车辆的位置。在航位推算导航中使用IMU的一个重大挑战是,卫星信号可能会丢失较长时间,结果使累积角度误差过大而无法精确定位车辆。
从计算的角度来说,随着所需积分时间变长,累积误差会随之变大,这也是为什么在航位推算应用中,较长的运行时间会导致精度出现偏差。想要提升推算精度,提升传感器整体性能当然是一个方法,减少IMU的速率误差是很传统的降低角度误差的办法。不过从现在的MEMS系统来看,车规级IMU已经做到很精密了,在这一性能上改善的空间有限。
那另一个角度,就是通过缩短积分时间来降低误差。一般使用低通滤波器来缩短这个时间,用低通滤波器过滤掉数字域中的噪声,减少无效的积分时间。在IMU中,设定一个阈值,小于该阈值的速率样本做归零处理,在航位推算时只取剩下的有效速率。受IMU本身性能(主要是噪声)的影响,这些无效积分时间有时候会很多,甚至超过有效积分时间。在过滤之后,积分时间大大缩短,累积的角度误差也可以明显降低。
在传感器性能能提升的空间相对有限的情况下,通过低通滤波器缩短积分时间是一种简单且有效地提升航位推算精度的方法。
小结
在GPS 或GNSS无法独立工作的场景里,如何精准定位车辆需要依赖航位推算。目前航位推算模块也表现出完全匹配车载导航水平的高定位精度,大大降低了车载导航的局限性。
航位推算DR通常被用来弥补GPS 或GNSS的定位困难,在卫星定位精度降低的时候,航位推算通过使用来自各种传感器(陀螺仪传感器,加速度计,速度脉冲等)的信息来计算汽车当前位置,维持汽车的定位精度。
无联机航位推算的精准定位
航位推算最常见的是使用IMU来推算车辆的即时航向。借助该信息再加上行驶的距离,导航系统可以正确确定车辆的位置。高端汽车中的航位推算ADR是将GNSS数据与从安装在车身和车轮上的相关传感器收集到的位置信息相结合,然后进行定位推算。这种最精准的定位需要车辆自身数据网络集成度要足够高。
那在车辆自身数据网络集成度不那么高的情况下能否也实现比单GNSS更准确的定位呢?那就是无联机航位推算UDR。无联机航位推算可以实现比GNSS定位效果更好,且十分接近ADR。无联机航位推算这种办法并不需要与车辆网络连接起来,它只将惯性传感数据与GNSS数据结合起来推算得到车辆位姿信息。
无联机航位推算模块通过获取IMU的角度和加速度的精确测量数据在GNSS信号被干扰或者失真时提供即时的定位修正。目前的能够支持无联机航位推算的芯片或模块,车辆即使在没有地图匹配的情况下,位置精度也相当高,基本等同于车载导航精度。
特色技术下的航位推算芯片修正车辆位置信息
航位推算模块现在有不少供应商在做,而且都开始推出无联机航位推算功能。基本的原理都是相同的,具体的技术细节会有些不一样,比如SkyTraq Technology的S1722DR8,结合GNSS位置数据、陀螺仪数据(测量转角)和里程表数据(测量行驶距离)。-148dBm冷启动灵敏使它能够在极弱的信号环境中自动获取、跟踪和定位位置。SkyTraq Technology通过扩展卡尔曼滤波算法将GNSS和传感器数据与依赖于GNSS信号质量的加权函数相结合,降低误差效果显著。SkyTraq Technology去年推出的PX1120D则是集成6轴IMU和四核GNSS,前装应用提供wheel-tick融合航位推算,后装应用则是满足传感器融合级别的无联机航位推算,提供100%位置覆盖。
SkyTraq Technology
u-blox的NEO-M9V模块航位推算模块同样是IMU结合四核GNSS,提供无联机航位推算,运用的dead reckoning(死区计算)技术,相较于单个GNSS模块能够提升三倍精度,在常见的环境中能做到分米级别的精度。NEO-M9V也使用了耦合的卡尔曼滤波器将追踪精度的信息反馈到GNSS组件中,衡量所有GNSS和传感器信号。NEO-M9V还有一个特点,高刷新频率,提供实时的HNR。另外,模块集成的SAW/LNA缓解了一部分射频干扰。无联机航位推算模块里结合实时运动学(RTK)技术和校正服务的高精度算法在多频段中可实现高精度位置的快速收敛和重新收敛。
带-M9V模块航位推算模块的GNSS芯片,u-blox
ST的Teseo III,Teseo-VIC3DA模块同样结合了6轴IMU与GNSS IC,内置航位推算,不仅功耗更低,还加入了更高精度的载波相位跟踪。-163dBm灵敏度跟踪能够实现1.5m CEP的精度定位。Teseo-VIC3DA 的航位推算定位速率高达30Hz,延迟很低,可以大幅减少UART通道抖动。ST硬件设计上的领先性在该模块里也得以体现,Teseo-VIC3DA在16.0 mm x 12.2 mm 的小尺寸内,由于板载提供了卓越的准确性温度补偿晶体振荡器(TCXO)和缩短的首次定位时间(TTFF)。
虽然各个不同厂商的航位推算模块使用的特色硬件、软件技术不一样,但是原理相同,都是通过收集传感器内部的数据计算出当前位置相对于上一次卫星定位的距离。当然,想实现高精度的航位推算对传感器的要求也很高,除了必要的精度之外,器件功耗必须要低,这样才能始终保持开启模式,并为航位推算提供数据。
如何进一步提高航位推算精度
从上面这些航位推算模块我们可以看到,IMU是相当重要的。IMU测量车辆的旋转速率,代表车辆即时航向的角度通过计算旋转速率的时间积分而求得,再结合航向和行驶距离即可以确定车辆的位置。在航位推算导航中使用IMU的一个重大挑战是,卫星信号可能会丢失较长时间,结果使累积角度误差过大而无法精确定位车辆。
从计算的角度来说,随着所需积分时间变长,累积误差会随之变大,这也是为什么在航位推算应用中,较长的运行时间会导致精度出现偏差。想要提升推算精度,提升传感器整体性能当然是一个方法,减少IMU的速率误差是很传统的降低角度误差的办法。不过从现在的MEMS系统来看,车规级IMU已经做到很精密了,在这一性能上改善的空间有限。
那另一个角度,就是通过缩短积分时间来降低误差。一般使用低通滤波器来缩短这个时间,用低通滤波器过滤掉数字域中的噪声,减少无效的积分时间。在IMU中,设定一个阈值,小于该阈值的速率样本做归零处理,在航位推算时只取剩下的有效速率。受IMU本身性能(主要是噪声)的影响,这些无效积分时间有时候会很多,甚至超过有效积分时间。在过滤之后,积分时间大大缩短,累积的角度误差也可以明显降低。
在传感器性能能提升的空间相对有限的情况下,通过低通滤波器缩短积分时间是一种简单且有效地提升航位推算精度的方法。
小结
在GPS 或GNSS无法独立工作的场景里,如何精准定位车辆需要依赖航位推算。目前航位推算模块也表现出完全匹配车载导航水平的高定位精度,大大降低了车载导航的局限性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
车载导航
+关注
关注
3文章
77浏览量
18682 -
航位推算
+关注
关注
0文章
4浏览量
252
发布评论请先 登录
相关推荐
高精度定位新突破:基于ST T5 GNSS芯片高精度定位系统在非车规应用解决方案
随着无人机、智能割草机等非车规领域需求激增,GNSS芯片迎来新机遇。天合智控基于意法半导体STA8135芯片推出TH1100系列高精度GNSS模组,支持多星座三频信号接收,结合RTK算法可实现厘米级
光庭信息助力高精度导航定位关键技术突破
近日,经组织申报、专家评审、部门复核、社会公示等环节,湖北省发改委正式认定了48家工程研究中心为2024年湖北省工程研究中心。其中,“高精度定位导航授时湖北省工程研究中心”是依托武汉大学卫星导
移远通信推出全星系多频段高精度定位定向GNSS模组LG580P,引领高精度导航新时代
频率,为智能机器人、精准农业、测量测绘、自动驾驶等高精度导航应用场景带来了全新解决方案。 与单天线、高精定位GNSS模组LG290P相比,LG580P同时支持高达20Hz的RTK高精度
发表于 11-05 11:09
•843次阅读

物联网系统中高精度RTK定位方案的实现_高精度定位模块
物联网系统中为什么要使用高精度定位模块 物联网系统中使用高精度定位模块的原因主要体现在以下几个方面: 提高定位

探索UWB技术的独特优势:实现高精度定位
在UWB定位系统中,一个标签通过与三个基站的信号交互进行三角测量,最多可以有30个标签同时与这三个基站通信,实现对多个目标的高精度定位和跟踪。
采用三点平面
基于ST第五代高精度定位芯片的车载定位P-BOX方案
的高精度定位。ST最新的高精度定位解决方案P-BOX是ST汽车级芯片组全面解决方案,可以支持多频段GNSS信号接收、Rawdata原始观测值输出、IMU惯性

AT372-6P单频高精度定位模块datasheet
单频RTK模块是一种基于全球卫星导航系统(GNSS)的高精度定位技术模块,主要运用单频接收器接收卫星信号,并结合基准站数据进行差分计算,以实现高精度
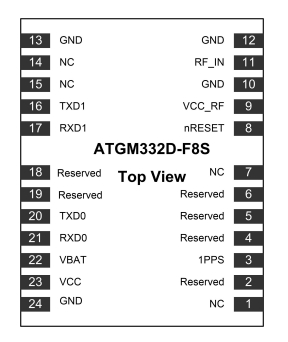
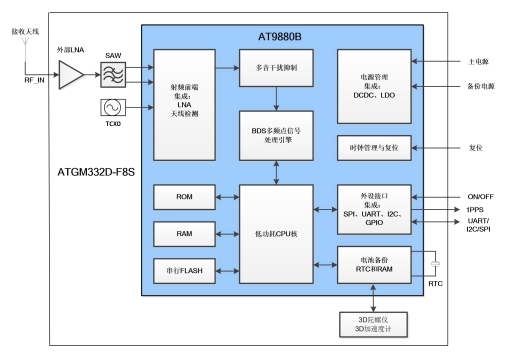
ATGM332D-F8S:低功耗、高集成度单北斗多频车载航位推算模块
: ATGM332D-F8S系列模块是12.2×16mm尺寸的高性能单北斗多频车载航位推算模块,该模块集成北斗接收机、6轴惯性传感器,能够为行
北斗RTK高精度定位系统介绍
北斗RTK高精度定位系统是一种高精度、高可靠、高效率的定位系统。它采用北斗卫星导航系统,结合实时动态差分RTK技术,能够
室外定位:高精度北斗RTK定位技术
驱动下,北斗RTK定位技术迎来了广阔的发展机遇,不断向高精度位置服务领域发展,赋能千行百业数字化发展,极大促进了我国卫星导航与位置服务产业的发展。 RTK是如何实现
什么是高精度定位平板?
普通GPS设备的精度。 高精度定位平板的关键技术是RTK(Real-Time Kinematic,实时动态测量)技术。RTK技术通过接收来自基站的差分信号,实时修正GPS信号中的误差,实现
北斗高精度定位手持终端在哪些场景中应用
随着科技的飞速发展,高精度定位技术已成为现代社会不可或缺的一部分。北斗卫星导航系统作为中国自主研发的全球卫星导航系统,其高精度

北斗高精度定位终端的工作原理和精度范围
北斗高精度定位终端的工作原理主要基于北斗卫星导航系统,通过卫星信号的接收、处理和计算,实现了对目标位置的精确测量。以下是关于北斗高精度

高精度定位设备的精准定位功能
主要基于全球卫星导航系统(GNSS)和惯性导航系统(INS)技术。GNSS通过一组卫星进行测量和计算,确定地面物体位置的系统,而INS则使用陀螺仪和加速度计等内部设备,将运动信息转换为位置信息。这两种技术的结合使得高精度






 工商网监
工商网监
评论