 UART通讯过程详解
UART通讯过程详解
UART通用异步收发传输器(Universal Asynchronous Receiver/Transmitter),通信双方接三根线,RX、TX和GND。其中,TX用于发送数据,RX用于接受数据,双方收发交叉对接,支持全双工方式。
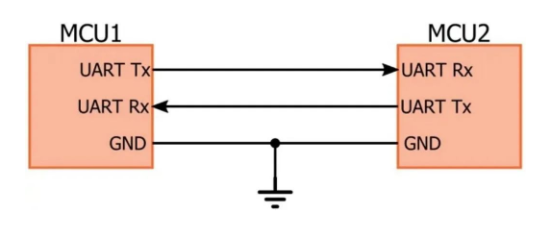
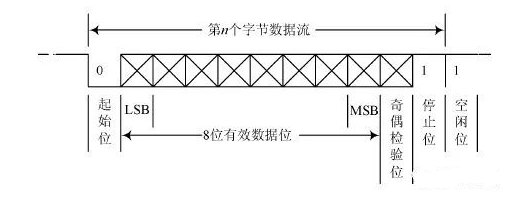
如A发数据到B,平时空闲时A.TX和B.RX.保持1,当A.TX先发0作为起始位,告诉B请注意,我要发数据了。然后就开始发数据,数据位可配置,通常是5位,6位,7位,8位,一帧数据发完后,A.TX给个高电平告诉B.RX我发完了一帧。如果开启校验位,在发停止位之前发送个校验位,一般都不需要校验位了,短距离有线传输出错的概率非常小。如果还有数据,则重复前面的操作。
一般软件配置串口,有波特率,数据位、停止位、校验位、流控。分别表示传输速度,一帧数据的长度,以及发完告知停止,发完是否校验,是否进行发送控制。看起来参数很多,针对个人经验,一般都是固定8位数据位,1位停止位、无校验、无流控,只是配置波特率。UART没有时钟控制数据捕获时机,依靠通信前就定义波特率,双方按定义的频率读写数据位,正如裘千丈的水上漂,一旦暗桩安装固定,就得按固定的步长行走,否则就会出错落水。UART在水上漂项目可以,但是传输效率有限,一般高到921600,如果再高可能出现误码,继续加高,就是高空飞行。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传输器
+关注
关注
0文章
40浏览量
13030 -
串口
+关注
关注
14文章
1564浏览量
77341 -
uart
+关注
关注
22文章
1245浏览量
101942
发布评论请先 登录
相关推荐
详解UART转CAN应用方案
各位工程师是否遇到需要使用到CAN通信但缺少CAN接口的情况?最简便的方案是采用UART转CAN通讯。ZLG致远电子针对此应用CSM100系列模块解决方案,这款模块将极大的简化了开发流程,实现的方式是怎样的?本文为你详解。

ARM中基于DMA的高效UART通讯及其应用
在UART通讯中,通过采取DMA方式,直接将UART接收的数据转移到设定好的RAM区,然后设置相应的全局标志,通知主程序数据可用就可以了。
发表于 04-16 16:32
•7762次阅读

UART通讯模块介绍
功耗,并且集成了丰富的外设模块,可以满足工业和消费等多种应用。MSP430FR2311中的eUSCI_A0支持UART通讯,本文对此UART模块的寄存器配置进行了详细的分析和计算,以帮助工程师对此
UART串口通讯
UART串口通讯总结前言串口的基本概念串口配置的基本属性串口(Serial port)和RS-232串口通讯流控制前言此篇文章为转载,转载地址为uart串口
发表于 12-20 19:31
•24次下载

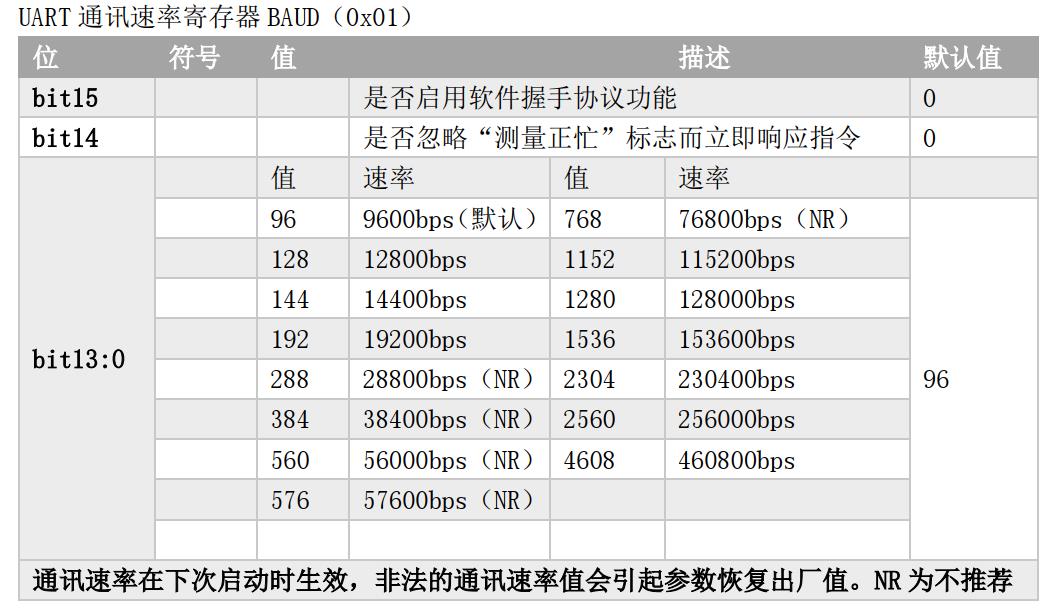
振弦采集模块的通讯速率和软件握手( UART)
振弦采集模块的通讯速率和软件握手( UART) 1 通讯速率 VMXXX 的 UART 接口支持 9600~460800bps 通讯速率,通
发表于 11-23 10:11
•463次阅读





 工商网监
工商网监
评论