 Mycobot机械臂各关节的运动(三)
Mycobot机械臂各关节的运动(三)
这一节我们开始第一个程序,就是机械臂各关节的运动。让我们首先打开Mycobot,然后登入一个终端,我们输入“python”进入python环境。
我们采用一边实验一边介绍MyCobot机械臂的API的使用方法:
(1)控制机械臂左右摆动所使用的 API 为:MyCobot(port)
程序的开头首先要导入这些API:
from pymycobot.mycobot import MyCobot
from pymycobot.genre import Angle
from pymycobot import PI_PORT, PI_BAUD # 当使用树莓派版本的mycobot时,可以引用这两个变量进行MyCobot初始化
import time
(2)get_angles()
函数功能:获得机械臂六个关节点的角度。
返回值:返回值的类型是 list,共有六个元素数据,分别对应关节 1~6。
当机械臂运行到某一个位置时我们可以通过print指令打印出当前机械臂的各关节角度数据。
如:
mc = MyCobot(PI_PORT, PI_BAUD)
angle_datas = mc.get_angles()
print(angle_datas)
运行后给出的结果:
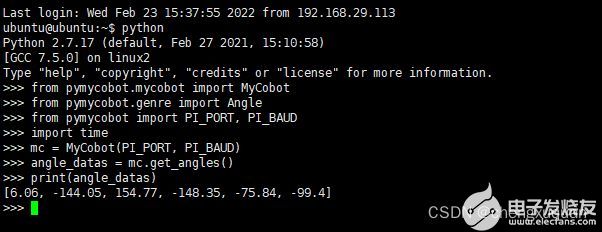
注意我们这里先记下这个机械臂的值: [6.06, -144.05, 154.77, -148.35, -75.84, -99.4],这个值的机械臂是个什么样子呢,我拍个照片给大家看。

(3)send_angle(id, degree, speed)
id:指的是哪一节机械臂,如果不指定id,那么就是指你要给出6节机械臂的运动角度。
degree:指的是关节的角度,取值范围-180~180
speed:指关节到达指定位置时的速度,取值范围0~100,值越大速度越快。
我们传递个数值给机械臂,当然先传0,就是0角度的状态。
mc.send_angles([0, 0, 0, 0, 0, 0], 50)
机械臂变成了这样子:

接下来让我们测试每一个关节是怎么运动的和运动的方向:
mc.send_angle(Angle.J1.value, 90, 50) #第一节转90度,速度50
mc.send_angle(Angle.J2.value, 30, 50) #第二节转30度,速度50
mc.send_angle(Angle.J3.value, 30, 50) #第三节转30度,速度50
mc.send_angle(Angle.J4.value, 30, 50) #第四节转30度,速度50
mc.send_angle(Angle.J5.value, 30, 50) #第五节转30度,速度50
mc.send_angle(Angle.J6.value, 30, 50) #第六节转30度,速度50
然后是这个样子:

所有的运动均符合右手定律。有兴趣的小伙伴可以试一下-90度,机械臂是如何运动。
(4)release_all_servos()
函数功能:放松机械臂,让其可以随意手动摆动。注意执行这个指令的时侯机械臂会因重力落下,要注意防止砸到其他的东西。
mc.release_all_servos()
然后让我们再把机械臂运动到刚开始的状态,这就要用到我们当时的那个值: [6.06, -144.05, 154.77, -148.35, -75.84, -99.4],好的让我们执行:
mc.send_angles([6.06, -144.05, 154.77, -148.35, -75.84, -99.4],50)
输入指令请注意不要用全角字符,一定要把键盘切换成半角字符运行。

这样机械臂又回到了初始时的状态。
(5)写成可执行文件。
假如我们写成一段连续的可执行文件又是怎么的呢?参考说明书中的代码,看下面机械臂摇摆程序:
#!/usr/bin/python3
#-*- coding: UTF-8 -*-
from pymycobot.mycobot import MyCobot
from pymycobot.genre import Angle
from pymycobot import PI_PORT, PI_BAUD # 当使用树莓派版本的mycobot时,可以引用这两个变量进行MyCobot初始化
import time
mc = MyCobot(PI_PORT, PI_BAUD)
# 获得当前位置的坐标
angle_datas = mc.get_angles()
print(angle_datas)
# 用数列传递传递坐标参数,让机械臂移动到指定位置
mc.send_angles([0, 0, 0, 0, 0, 0], 50)
print(mc.is_paused())
# 设置等待时间,确保机械臂已经到达指定位置
# while not mc.is_paused():
time.sleep(2.5)
# 让关节1移动到90这个位置
mc.send_angle(Angle.J1.value, 90, 50)
# 设置等待时间,确保机械臂已经到达指定位置
time.sleep(2)
# 设置循环次数
num = 5
# 让机械臂左右摇摆
while num > 0:
# 让关节2移动到50这个位置
mc.send_angle(Angle.J2.value, 50, 50)
# 设置等待时间,确保机械臂已经到达指定位置
time.sleep(1.5)
# 让关节2移动到-50这个位置
mc.send_angle(Angle.J2.value, -50, 50)
# 设置等待时间,确保机械臂已经到达指定位置
time.sleep(1.5)
num -= 1
# 让机械臂缩起来。你可以手动摆动机械臂,然后使用get_angles()函数获得坐标数列,
# 通过该函数让机械臂到达你所想的位置。
mc.send_angles([88.68, -138.51, 155.65, -128.05, -9.93, -15.29], 50)
# 设置等待时间,确保机械臂已经到达指定位置
time.sleep(2.5)
# 让机械臂放松,可以手动摆动机械臂
mc.release_all_servos()
注意:程序前面要加上:
#!/usr/bin/python3
#-*- coding: UTF-8 -*-
让我们把这个文件保存成,3.py
运行这段代码:
直接在终端窗口执行:
python 3.py
这样就可以连续执行机械臂的运动了。
审核编辑 黄昊宇
-
机器人
+关注
关注
211文章
28468浏览量
207354 -
机械臂
+关注
关注
12文章
515浏览量
24616
发布评论请先 登录
相关推荐
关节臂三坐标测量仪测量技术的新风尚,专家热议未来智能制造

Ethernet/IP转Profient网关模块, 一招打通关节机械臂任督二脉
机械臂的高效运作,连接器起关键作用
【原创】 drawbot 平面机械臂scara写字画画机器人DIY教程贴
OrangePi AIpro应用:机械臂应用开发指南

工业机器人和机械臂的设计、功能和应用有哪些区别?
大象机器人开源协作机械臂机械臂接入GPT4o大模型!

国产Cortex-A55人工智能教学实验箱_基于Python机械臂跳舞实验案例分享
干货!国产Cortex-A55人工智能实验箱机械臂积木搬运实验案例

基于六维力传感器的机械臂自动装配应用

大象机器人开源协作机械臂myCobot 630 全面升级!
自然语言控制机械臂:ChatGPT与机器人技术的融合创新(下)

如何去提升机械臂的位置控制性能?

【国产FPGA+OMAPL138开发板体验】(原创)2.手把手玩转游戏机械臂
大象机器人六轴协作机械臂myCobot 320 进行手势识别!






 工商网监
工商网监
评论