 融合机载LiDAR和高光谱影像的土地利用分类
融合机载LiDAR和高光谱影像的土地利用分类

高光谱影像包含丰富的光谱信息,能够准确地描述地物的光谱特征,但在地物分类应用中通常会存在同物异谱和同谱异物现象。机载激光雷达(LightDetectionandRanging,LiDAR)可以直接获取地物高精度、高密度的三维空间信息,通常为离散点云,由于缺乏光谱/纹理信息,在地物分类方面表现出最大的不足。因此,融合机载LiDAR点云的三维空间信息和高光谱影像的纹理信息,即可发挥各自优势、取长补短,提升地物分类的精度和可信度。本文在已有研究基础上从机载LiDAR数据和高光谱影像数据提取不同特征,设计了不同特征组合的融合数据集,采用效率更高、实现简单的随机森林算法(randomforest,RF)进行地物分类研究,并进行精度评价与对比,以提高分类精度,为土地资源利用监测、管理提供据支持。
1数据源
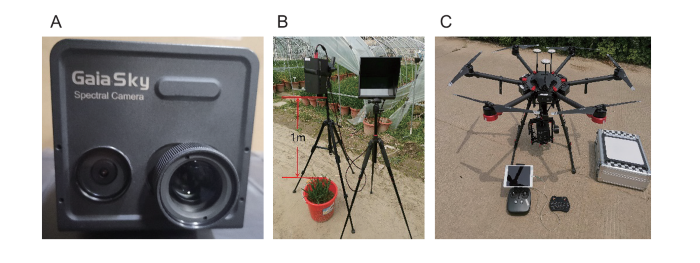
机载LiDAR和高光谱影像数据覆盖区域位于广西灵川县,地形平坦,包括民房、农田、林地、裸地等地物类型(图1)。其中机载LiDAR数据采集于2020年11月6日,由无人机LiDAR系统获取,飞行高度约120m,平均点密度38点/m2,包含xyz坐标信息、强度信息及多次回波信息。高光谱数据采用高光谱成像仪于2020年12月25日获取,当日天气晴好,飞行高度为130m,空间分辨率为0.12m;波长范围为400-1000nm,包含270个光谱波段。
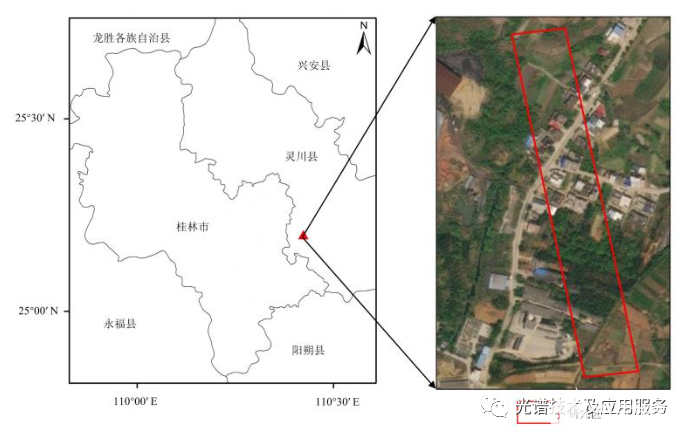
图1实验区地理位置
2研究方法
分别从机载LiDAR点云数据和高光谱影像中提取地物的高度特征、光谱特征、红边特征及纹理特征,并设计了5种不同特征组合的影像,然后应用随机森林分类器对不同特征组合的影像进行土地利用分类,并比较其精度。技术路线如图2。
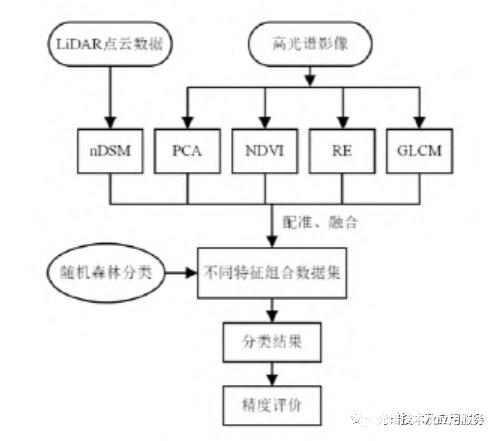
图2技术路线图
2.1 LiDAR点云特征提取
首先采用三角网滤波方法进行点云滤波,然后采用不规则三角网方法(TriangulatedIrregularNetwork,TIN)对滤波后的地面点和非地面点进行插值,生成格网分辨率为0.25m的数字高程模型(digitalelevationmodel,DEM)和数字表面模型(digitalsurfacemodel,DSM),将插值生成的DEM和DSM进行差值运算,得到nDSM。
2.2高光谱影像特征提取
高光谱影像包含丰富的地物光谱信息,波段数多,在分类过程中,会导致数据冗余、效率变低、影响分类精度,因此首先要对高光谱影像数据进行降维处理。主成分分析法(principalcomponentanalysis,PCA)是目前应用最广泛的降维方法,在ENVI5.3中对高光谱数据进行降维处理,选取前5个主成分波段特征。利用红边波段可以增强不同地物间的区分度,本文根据所用高光谱影像的光谱特点,定义了3种红边植被指数,组成红边特征集(后文以RE表示)。归一化植被指数(normalizeddifferencevegetationindex,NDVI)对绿色植被比较敏感,也是遥感影像分类中常用的植被指数。各植被指数计算公式如表1所示。
表1植被指数

注:NIR为近红外波段;R为红波段;RE1为红边710波段;RE2为红边750波段
纹理特征信息能够有效提升分类精度,本文采用灰度共生矩阵(gray-levelco-occurrencematrix,GLCM)方法提取影像的纹理特征,并选取了同质度、非相似性、对比度、相关性、熵和角二阶矩作为影像的纹理特征,对经PCA变换后的影像进行GLCM计算得到纹理特征。
2.3分类方法
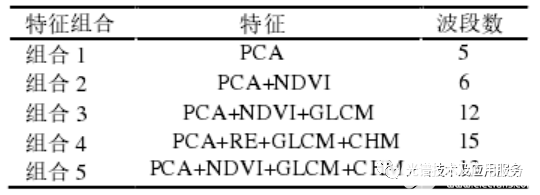
首先使用ENVI5.3软件,以高光谱影像为基准影像,选取nDSM和高光谱影像上明显的同名地物点作为配准基元进行配准。为探究不同特征组合的分类效果,本文根据提取的不同特征,设计了5个特征组合的融合影像,如表2所示。
表2不同特征波段组合
随机森林是一种机器学习算法,它将多棵决策树集成在一起组成“森林”是目前遥感影像分类常用的方法,具有参数设置少、稳定性好、训练样本速度快、分类精度高等特点。本文根据实地调查数据和通过Googleearth高分辨率影像目视解译完成训练样本和验证样本的选择,使用RF分类器,对构建的不同特征组合进行地物分类。在随机森林算法中,决策树的数量(ntree)和为随机特征的数量(mtry)是两个关键参数,本文通过反复优化,将ntree设置为100,mtry设为特征数量的平方根。
2.4精度评价
采用Kappa系数和总体分类精度(OverallClassificationAccuracy,OA)对分类结果进行精度评价。并计算每种地物类别的用户精度和生产者精度,以便更好地评价不同实验组合的分类结果。
3 结果与分析不同特征组合的分类结果如图3所示。可以看出,在融合影像仅具有光谱特征时(组合1),部分建筑物明显被误分为了道路和裸地。在加入植被指数和纹理特征后(组合3),植被和裸地的区分更明显,建筑物误分为道路的情况也有所改善,但仍有部分裸地被分为了建筑物;加入LiDAR点云数据提取的nDSM后,融合影像(组合4)具有了高度特征,建筑物和道路边缘区分更清晰,建筑物和裸地的误分情况相较于组合3也有极大改善,林地、农作物和裸地的区分也更明显。
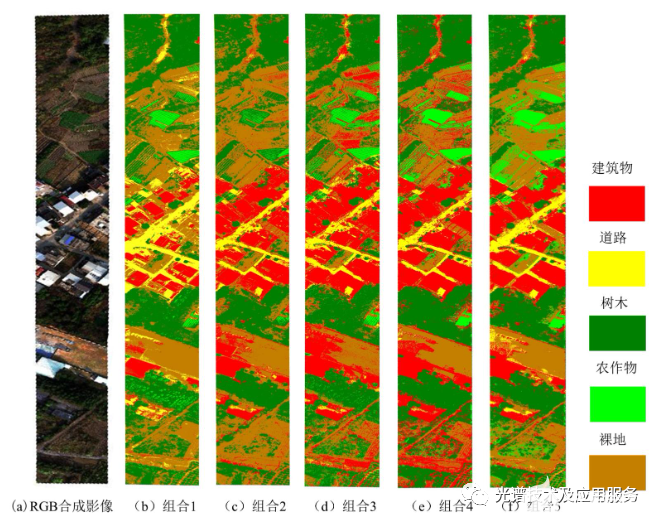
图3不同特征组合分类结果
表3分类结果精度统计
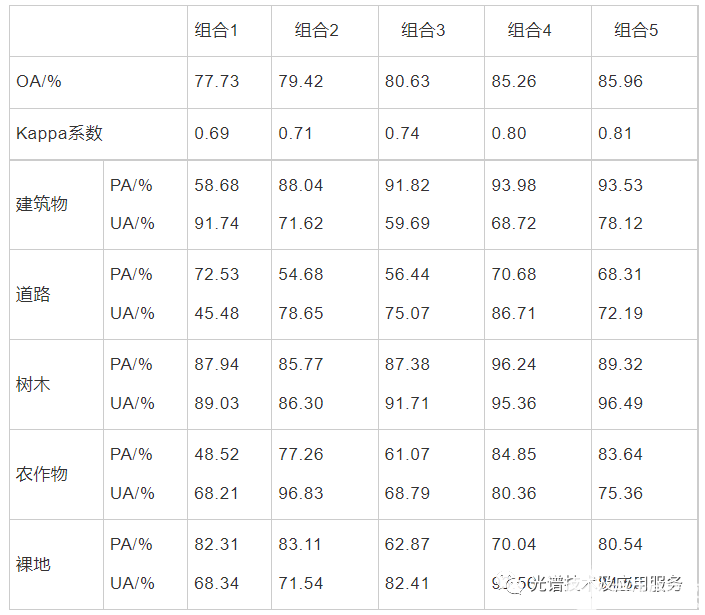
注:PA为生产者精度;UA为用户精度
从表3可以看出,组合1的分类精度最低,OA和Kappa系数分别为77.73%和0.69;组合5的分类精度最高,OA和Kappa系数分别为85.96%、0.81,说明高光谱影像融合植被指数、纹理特征和高度特征后,分类精度得到有效提升。特别在添加了LiDAR点云数据提取的nDSM的高度特征后,分类精度提升最多,相较于未添加高度特征(组合3)OA和Kappa系数分别提升了5.33%和0.07,说明融合高程信息可以极大提高高光谱数据的分类精度;组合4的总体分类精度虽略低于组合5,但组合4中林地的分类精度却更高,PA和UA均达到95%以上,说明红边光谱特征与从LiDAR数据提取的nDSM融合后对高植被的分类效果更好。
审核编辑 黄昊宇
-
高光谱图像
+关注
关注
0文章
25浏览量
7417 -
LIDAR
+关注
关注
11文章
368浏览量
31629
发布评论请先 登录
高光谱相机的“鱼与熊掌”:空间分辨率与光谱分辨率,如何兼得?
高光谱与多光谱技术:核心区别与应用选择


高光谱成像技术在汽车配件面漆颜色识别中的应用

高光谱成像:分析波长,可视化细微的色彩、材质差异和异物

天空之眼,守护碧水清流:机载高光谱成像系统在河流水环境监测中的应用

地物光谱应用在农业与城市规划中的创新实践
高光谱成像在作物长势监测和产量预估的研究进展
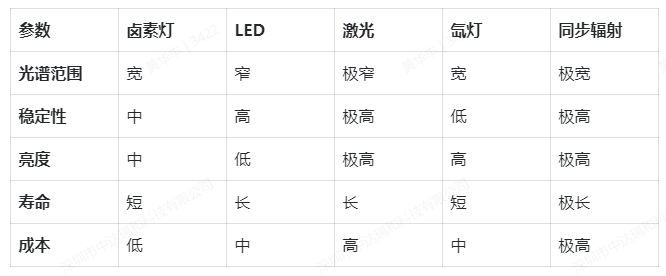
高光谱成像的照明源有哪些?
如何搭建一个高光谱成像实验场景?

如何有效利用高光谱成像技术提升数据分析效率


机载高光谱系统与机器学习算法结合实践丨双利合谱机载高光谱相机在小麦监测应用



评论