 通过RepSurf点云结构实现多项任务SOTA
通过RepSurf点云结构实现多项任务SOTA
01 、摘要
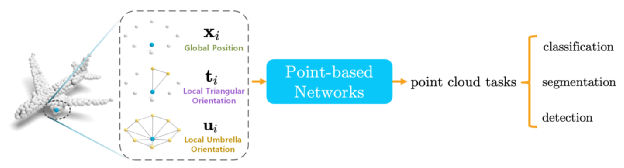
大多数先前的工作通过坐标表示点云的形状。然而,直接利用坐标描述局部几何是不充分的。在本文中,我们提出了 RepSurf(representative surface),这是一种新颖的点云表示,显式的描述了非常局部的点云结构。
我们探索了 RepSurf 的两种变体,Triangular RepSurf 和 Umbrella RepSurf,其灵感来自计算机图形学中的三角形网格和伞形曲率。我们在表面重建后通过预定义的几何先验计算 RepSurf 的表征。RepSurf 可以成为绝大多数点云模型的即插即用模块,这要归功于它与无规则点集的自由协作。
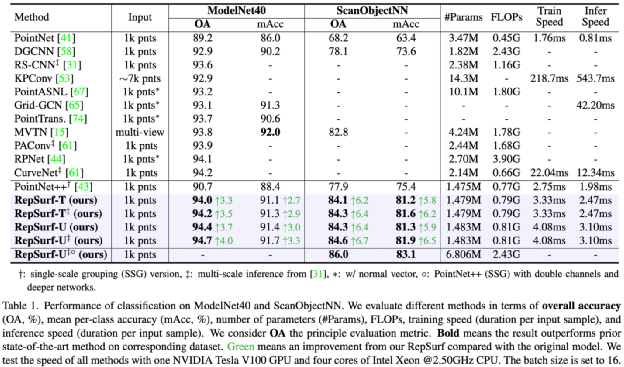
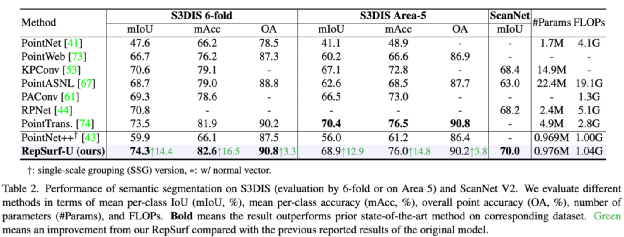
基于 PointNet++(SSG 版本)的简单基线,Umbrella RepSurf 在各种基准上的分类、分割和检测在性能和效率方面都大大超过了之前的 state-of-the-art。在只有0.008M参数数量、0.04G FLOPs 和 1.12ms推理时间的增的情况下,我们的方法在分类数据集 ModelNet40 上达到 94.7% (+0.5%),在 ScanObjectNN 上达到 84.6% (+1.8%) ;而在分割任务的 S3DIS 6-fold 上达到74.3%(+0.8%) mIoU,在ScanNet 上达到70.0% (+1.6%) mIoU 。
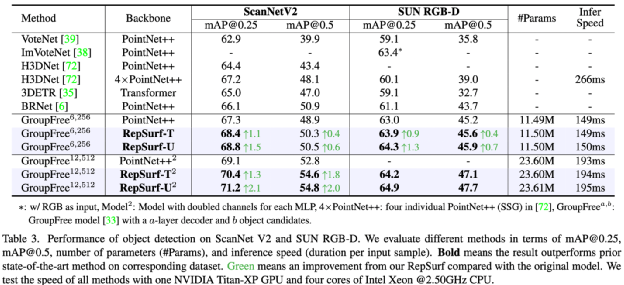
对于检测任务,我们的 RepSurf 应用于最先进的检测器,并在 ScanNetV2 上达到71.2% (+2.1%) mAP25、54.8% (+2.0%) mAP50 和在 SUN RGB-D数据集上64.9% (+1.9%) mAP25、47.7% (+ 2.5%) mAP50的性能。我们的轻量级Triangular RepSurf 在这些基准测试中同样表现出色。
02、 介绍
对原始点云表征(Point Cloud Representation)的处理因其在自动驾驶、增强现实和机器人技术等各种应用中的优势而引起了相当大的关注。但是,点云局部表征的不稳定性使得这个任务非常有难度。
局部形状对于点云的学习至关重要。为了从局部结构信息中学习,一些先前的工作从Grid(例如PointCNN)、Relation(例如RS-CNN)或Graph(例如DGCNN)中学习。
然而,这些方法通过加入更多成分(如欧几里得距离、注意力机制)或应用各种变换(如图形构造、体素化)隐式地从点云shape中提取局部特征。这些可能导致复杂的预处理或大量计算。我们认为这可能会导致在预定义成分时遗漏信息,或在转换过程中损失几何形状。因此,本文探索了更稳定的显式点云局部表征。
03、 动机
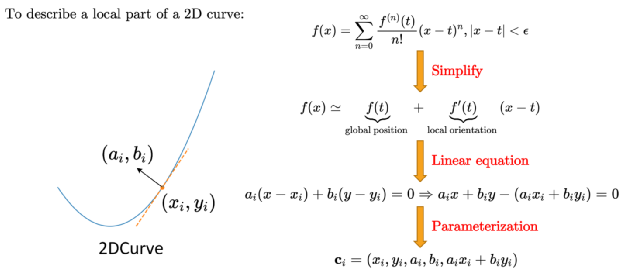
我们首先受到泰勒级数的启发。泰勒级数用导数表示局部曲线。为了简化它,我们只考虑到二阶导数。因此,我们可以通过其对应的切线粗略地表示局部曲线,或者我们称之为 3D 点云中的“surface”。
04、 方法
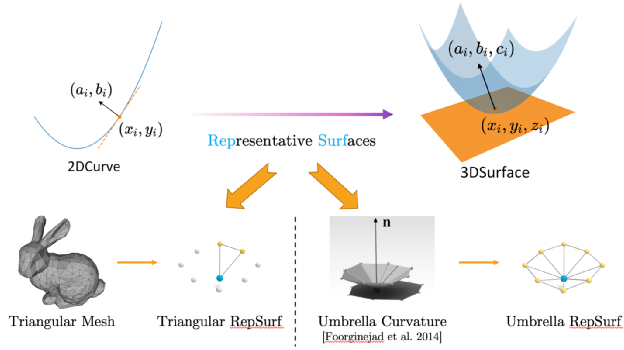
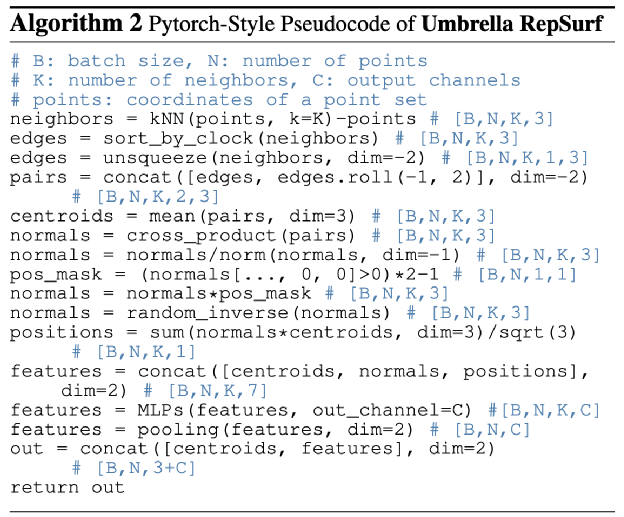
为了将2D Curve扩展到3D Surface,我们引入了两种RepSurf变体(Triangular RepSurf和Umbrella RepSurf)来近似的描述点云局部特征:
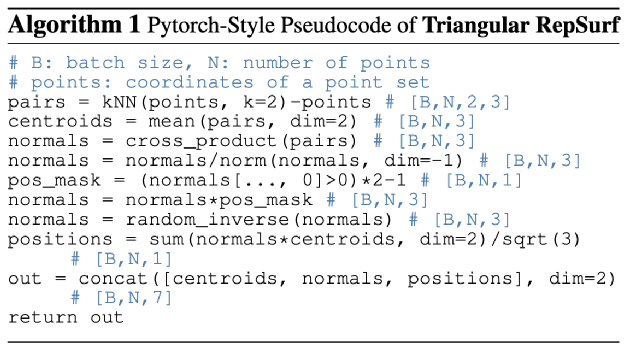
两种RepSurf的实现也非常简洁:
05 、实验
RepSurf分别在3D分类(ModelNet40,ScanObjectNN)、分割(S3DIS,ScanNet)、检测(ScanNetV2,SUN RGBD)上达到了不俗的效果:
06 、结论
我们希望我们的工作能够激发3D社区并唤起对点云的显示表征的重新思考。我们认为 RepSurf 值得在不同领域(例如自动驾驶)或更大规模的点云上进行进一步探索,因为 RepSurf 有能力去处理真实场景中的大量背景点。RepSurf 还可以通过其对几何敏感度的能力对点云采样带来帮助。
审核编辑:郭婷
-
机器人
+关注
关注
212文章
28887浏览量
209513 -
增强现实
+关注
关注
1文章
717浏览量
45129 -
自动驾驶
+关注
关注
787文章
13992浏览量
167632
原文标题:CVPR 2022 | 增加0.008M参数,显式局部点云表征实现多项任务SOTA
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
SOTA的定义是什么?常规的实现方式有哪些
基于OpenHarmony的华为云IoT智慧路灯实现
云任务阈值调度算法
3D 点云的无监督胶囊网络 多任务上实现SOTA
通过引入实例 scale-uniform 采样策略与 crop-aware 边框回归损失实现 SOTA 性能
SOTA机制详解

AURIX TC3XX系列最佳的SOTA方案
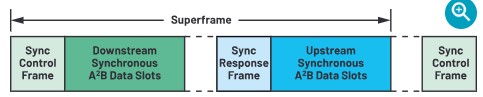
通过A2B更新软件—A2B如何给汽车应用中的SOTA带来变革
人工智能SOTA什么意思
三项SOTA!MasQCLIP:开放词汇通用图像分割新网络






 工商网监
工商网监
评论